What I did in Week 16
During this week, the integration of the final project system was documented. The project consists of an autonomous robotic assistant designed to transport tools and small materials between laboratories within the Universidad Indoamérica Technological Park.
The objective of the project is to develop a mobile platform capable of carrying items such as screwdrivers, hammers, drills, measuring instruments, and other laboratory accessories safely and autonomously. The system combines mechanical design, embedded electronics, autonomous navigation, power management, communication interfaces, and digital fabrication into a single integrated solution.
Introduction
As part of the Final Project development, the integration of the different subsystems that will compose the autonomous robotic assistant was planned and documented. The proposed platform is intended to automate the transportation of tools and small equipment between laboratories, reducing manual transportation tasks and improving workflow efficiency.
The robot is designed as an omnidirectional mobile platform capable of navigating predefined routes while carrying lightweight loads. The project integrates multiple disciplines including mechanical design, embedded programming, electronics, digital fabrication, power management, sensing technologies, and system communication.
The purpose of this System Integration assignment is to demonstrate how all these individual subsystems interact and contribute to the operation of the final robotic assistant.
Project Description
- The final project consists of an autonomous omnidirectional robot designed to transport tools and laboratory supplies between different workspaces. Unlike conventional differential-drive robots, this platform uses four omnidirectional wheels, allowing movement in any direction without changing orientation.
- This capability is particularly useful in laboratory environments where space may be limited and precise maneuverability is required. The robot will be capable of following predefined routes, detecting obstacles, communicating its operational status, and carrying small tools inside dedicated compartments.
- The structure will be primarily built using aluminum profiles and aluminum plates to provide mechanical strength while maintaining a lightweight design. Custom panels and protective covers will be fabricated using digital manufacturing processes available in the Fab Lab.
System Integration
- Control System:The control architecture is based on an ESP32 and an Arduino Mega. The ESP32 acts as the high-level controller responsible for navigation decisions, communication, and user interaction. The Arduino Mega manages low-level motor control and real-time encoder processing. This architecture allows the system to distribute processing tasks efficiently while maintaining reliable motor performance.
- Mobility System:The robot utilizes four geared DC motors equipped with quadrature encoders and four omnidirectional wheels. This configuration enables forward, backward, lateral, and diagonal motion while maintaining accurate positioning. The omnidirectional drive system significantly improves maneuverability inside laboratory environments where obstacles and narrow spaces are common.
- Navigation and Positioning System:Navigation is based on an infrared line-following sensor array that detects floor markings used as predefined routes. Additional ultrasonic sensors, infrared proximity sensors, and mechanical limit switches provide obstacle detection and safety functions. Together, these sensors improve environmental awareness and increase operational reliability.
- Power System:The platform is powered by a LiFePO4 battery pack connected to a Battery Management System (BMS). Multiple DC-DC converters distribute regulated voltages to the electronic subsystems. The power system includes a main power switch, protection fuses, and a dedicated charger to ensure safe and reliable operation.
- Delivery Compartment System:A dedicated storage compartment is integrated into the chassis to transport tools and small equipment. The compartment includes dividers, sensors, and locking mechanisms that secure the transported items during operation.This subsystem is essential for the robot’s logistics function within the laboratories.
- Communication System:The communication subsystem includes addressable LED strips, a status LED ring, and an audio notification module based on the DFPlayer Mini. These components provide visual and audible feedback regarding robot status, destination selection, operation mode, and system alerts.
Materials and Components
| Category | Components |
|---|---|
| Compute and Control | ESP32, Arduino Mega, motor drivers, logic-level shifters, jumper wires, protoboard |
| Movement System | 4 omnidirectional wheels, 4 geared DC motors with quadrature encoders, motor mounts, wheel hubs |
| Navigation and Sensors | IR line-following sensor array, floor markers, ultrasonic sensors, IR proximity sensors, bump switches |
| Power System | LiFePO4 battery pack, BMS, DC-DC converters, main power switch, fuses, battery charger |
| Delivery Compartments | Solenoid or servo latches, reed sensors, destination buttons, trays and dividers |
| Communication Output | WS2812B LED strips, LED status ring, DFPlayer Mini, speaker, microSD card |
| Chassis and Structure | Aluminum base plate, aluminum extrusion frame, 3D-printed or acrylic panels, brackets and fasteners |
| Build Tools and Consumables | JST connectors, XT60 connectors, heat-shrink tubing, solder, thermal paste |
| Software and Development Tools | Arduino IDE, PlatformIO, VS Code, motor control libraries, encoder libraries |
Budget Estimation
| # | Category | Key Items | Low (USD) | High (USD) |
|---|---|---|---|---|
| 1 | Compute and Control | ESP32, Arduino Mega, 2 motor drivers, level shifters, wiring | $180 | $320 |
| 2 | Movement (Omni Drive) | 4 omni wheels, 4 geared DC motors with encoders, hubs and mounts | $220 | $450 |
| 3 | Navigation and Sensors | IR line sensor array, ultrasonic sensors, bump switches | $80 | $180 |
| 4 | Power System | LiFePO4 battery pack, BMS, DC-DC converters, charger | $200 | $320 |
| 5 | Compartments | Latches, reed sensors, destination buttons, trays and dividers | $80 | $160 |
| 6 | Communication Output | LED strips, LED ring, DFPlayer Mini, speaker, SD card | $50 | $110 |
| 7 | Chassis and Structure | Aluminum frame, base plate, fasteners, cable management, Fab Lab shell | $120 | $280 |
| 8 | Build Tools and Consumables | Connector kits, heat-shrink tubing, solder, thermal paste | $60 | $140 |
| 9 | Software / Non-Physical | Arduino IDE, PlatformIO, VS Code, libraries | $0 | $0 |
| TOTAL | Sum of all categories | $990 | $1,960 | |
| Contingency (15%) | Import costs and replacement parts during testing | $149 | $294 | |
| PLANNING TOTAL | Recommended budget including contingency | $1,139 | $2,254 | |
Current Progress
- At the current stage of development, the system architecture has been defined and the main components have been identified. Initial experiments have already been performed using an ESP32 and a line-following sensor array.
- The prototype was able to move and detect the track; however, the navigation performance was not yet satisfactory. During testing, the robot continued moving forward without consistently following the predefined line. These results suggest that further calibration and optimization of the sensing system will be required.
- Despite these limitations, the tests provided valuable information regarding sensor behavior, environmental influences, and system integration requirements.
Packaging
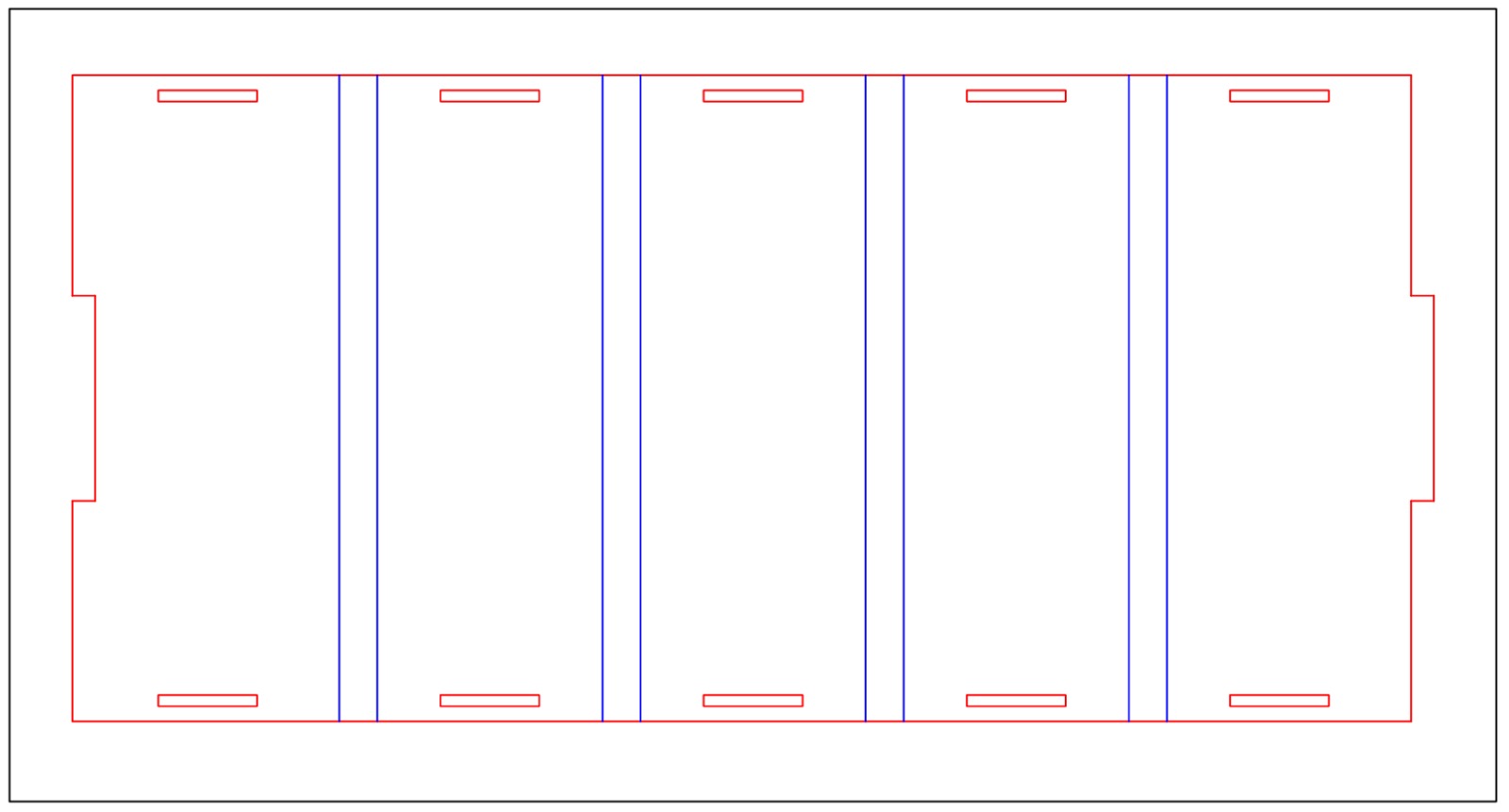
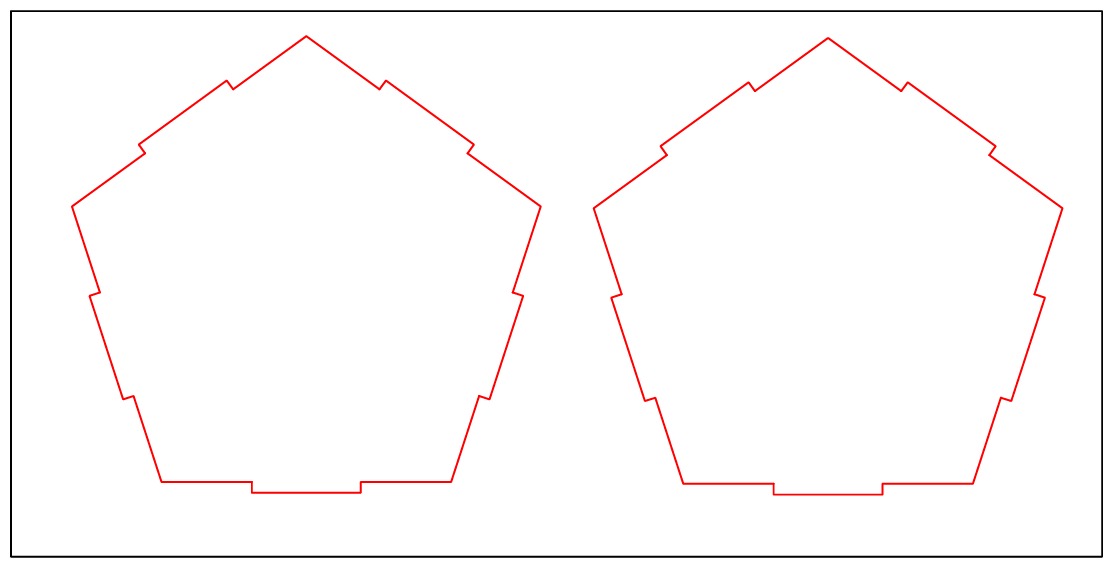
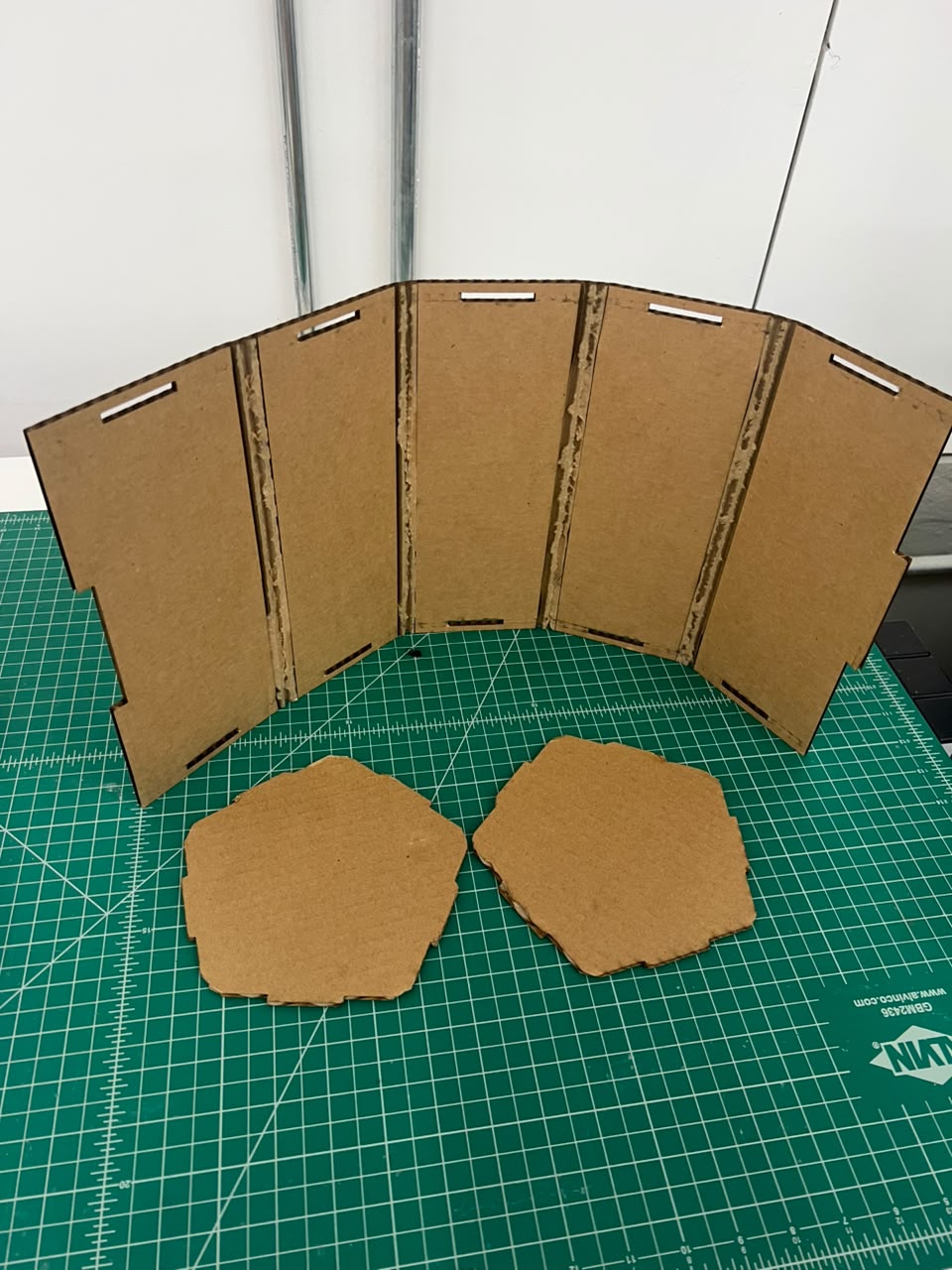
- In the first stage, corrugated cardboard was used as a base material due to its versatility, low weight and ease of generating folds. By partially removing one of its outer sheets, the material acquires greater bending capacity, which allows folded surfaces to be constructed with greater precision. With this logic, an enveloping shape containing a hexagon was designed, integrating criteria of geometric modulation, structural stability and adaptability of the material.
- The hexagon was developed incorporating perimeter tabs, which allow it to be fixed to the base in a more precise and stable way. These extensions function as joining elements, facilitating assembly between the pieces and improving the adhesion of the module within the general structure.
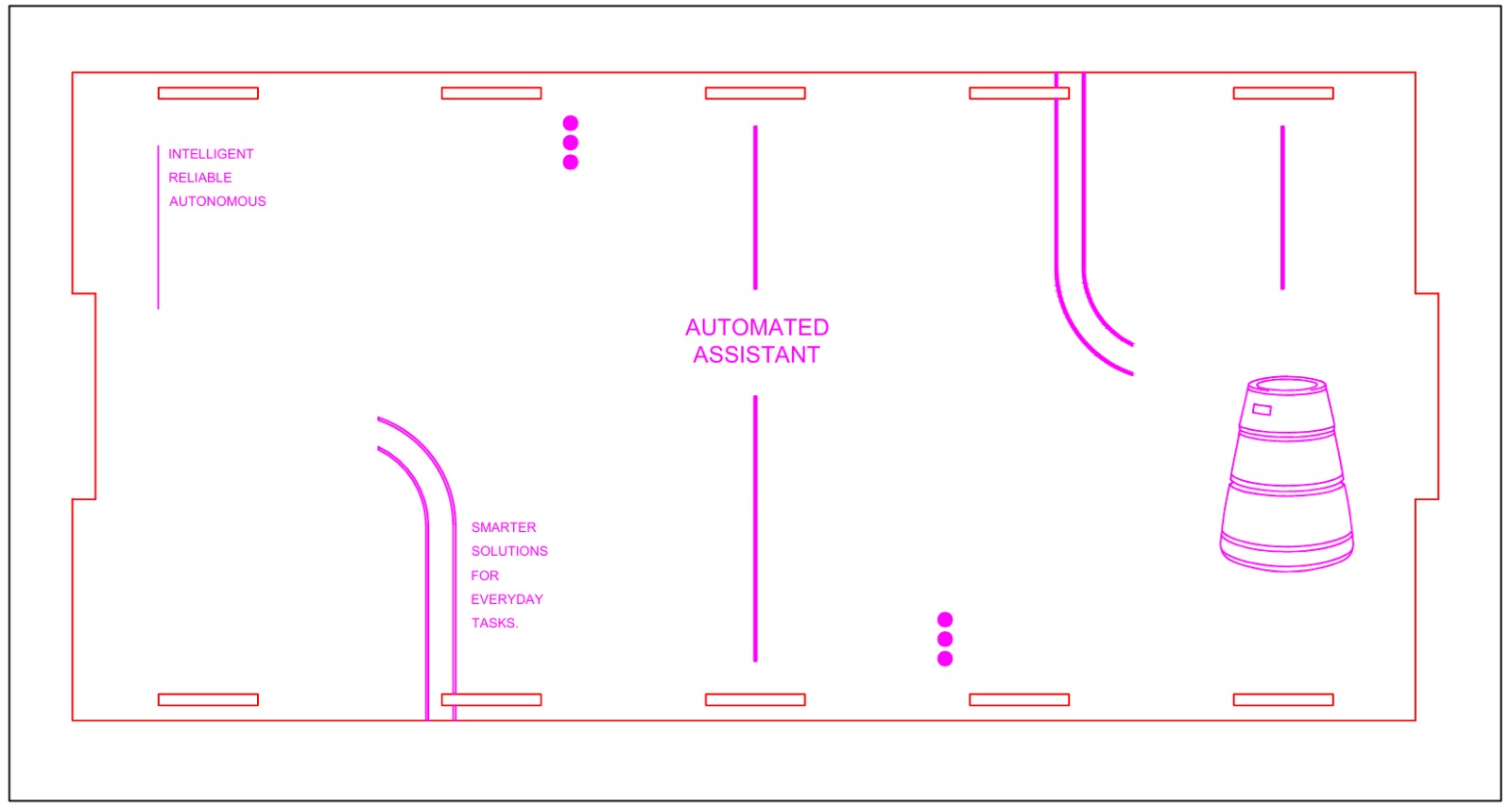
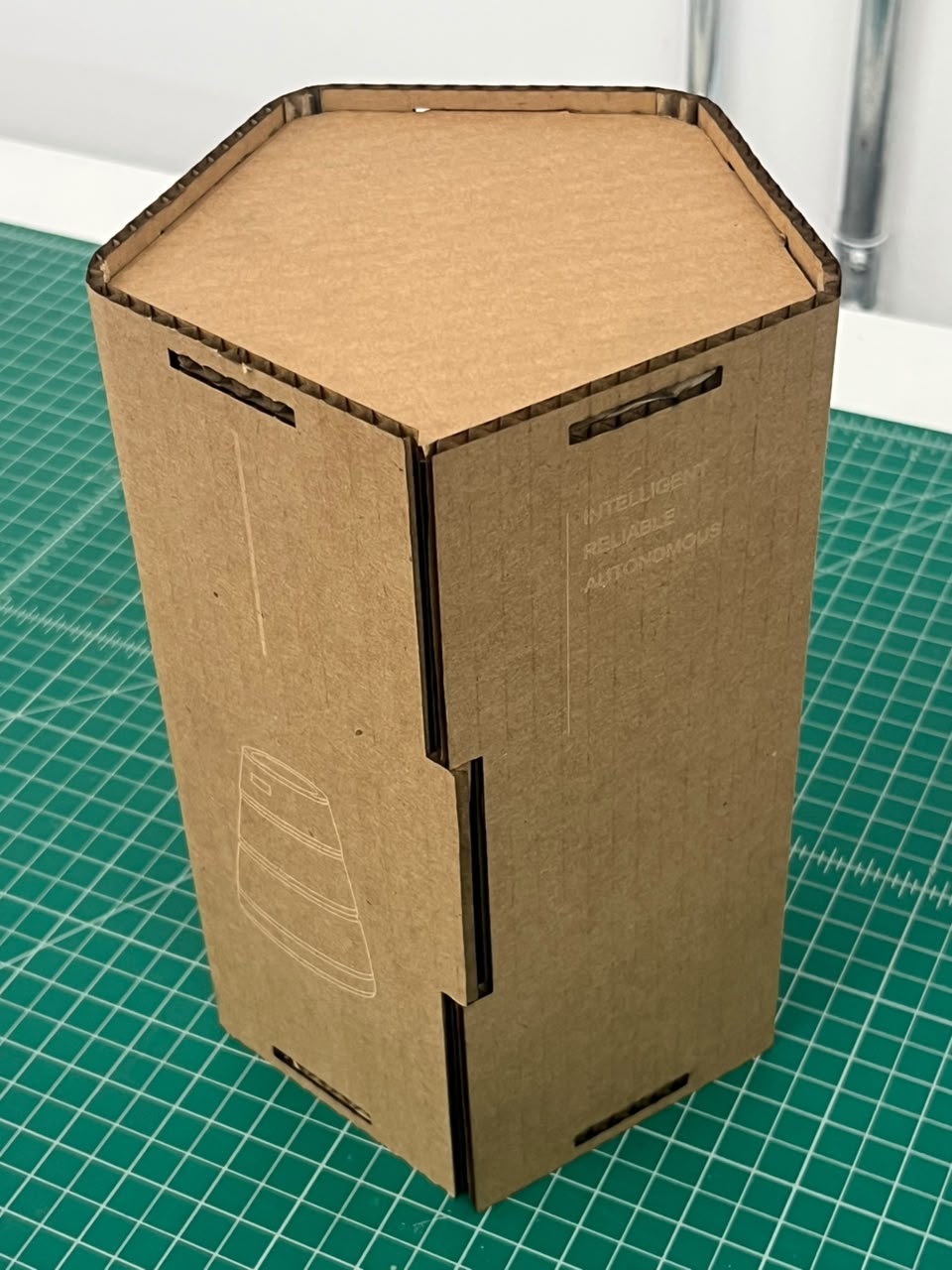
- A graphic design was developed for the box, which was later applied using laser cutter engraving. The visual proposal was proposed in coherence with the formal and conceptual identity of the robot contained within, so that the packaging maintains a direct relationship with the product. This process allowed us to customize the surface of the box with a precise, clean finish in accordance with the design language of the prototype.
- Once the pieces were cut, we proceeded with the assembly of each of the components to verify their shape, proportion and joining system. As a result, a preliminary prototype on a reduced scale was obtained, which allowed evaluating the general geometry of the box, the stability of the parts and the relationship between the packaging and the robot that will be contained inside.
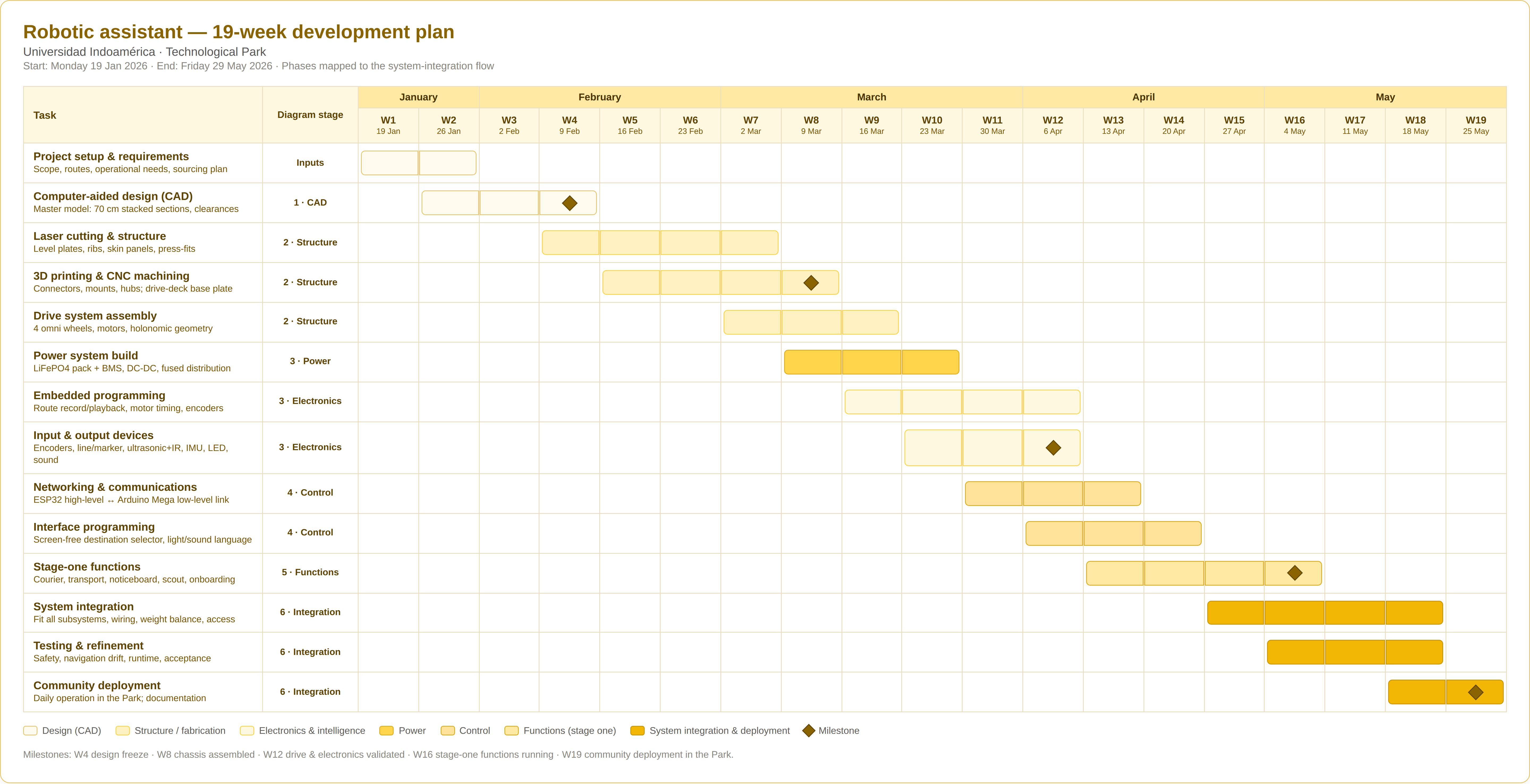
Final Project
This section explains how my final project will be developed in terms of planning.
Conclusion
- The proposed robotic assistant represents an integrated solution for autonomous laboratory logistics. The project combines omnidirectional mobility, embedded control systems, autonomous navigation, communication interfaces, power management, and digital fabrication into a single platform.
- Although the navigation subsystem still requires further refinement, the integration process has successfully defined the architecture, components, and operational strategy of the final project. This work establishes a solid foundation for future development, testing, and deployment of an autonomous robot capable of transporting tools and materials safely and efficiently between laboratories.
- In the preparation of the packaging we manufacture it on a scale because the project is very large and our laser machine is small format.
← Main Page