Week 17, Applications and Implications, Project Development
Table of Contents
- What will it do?
- Who has done what beforehand?
- What sources will you use?
- What will you design?
- What materials and components will be used?
- Where will they come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
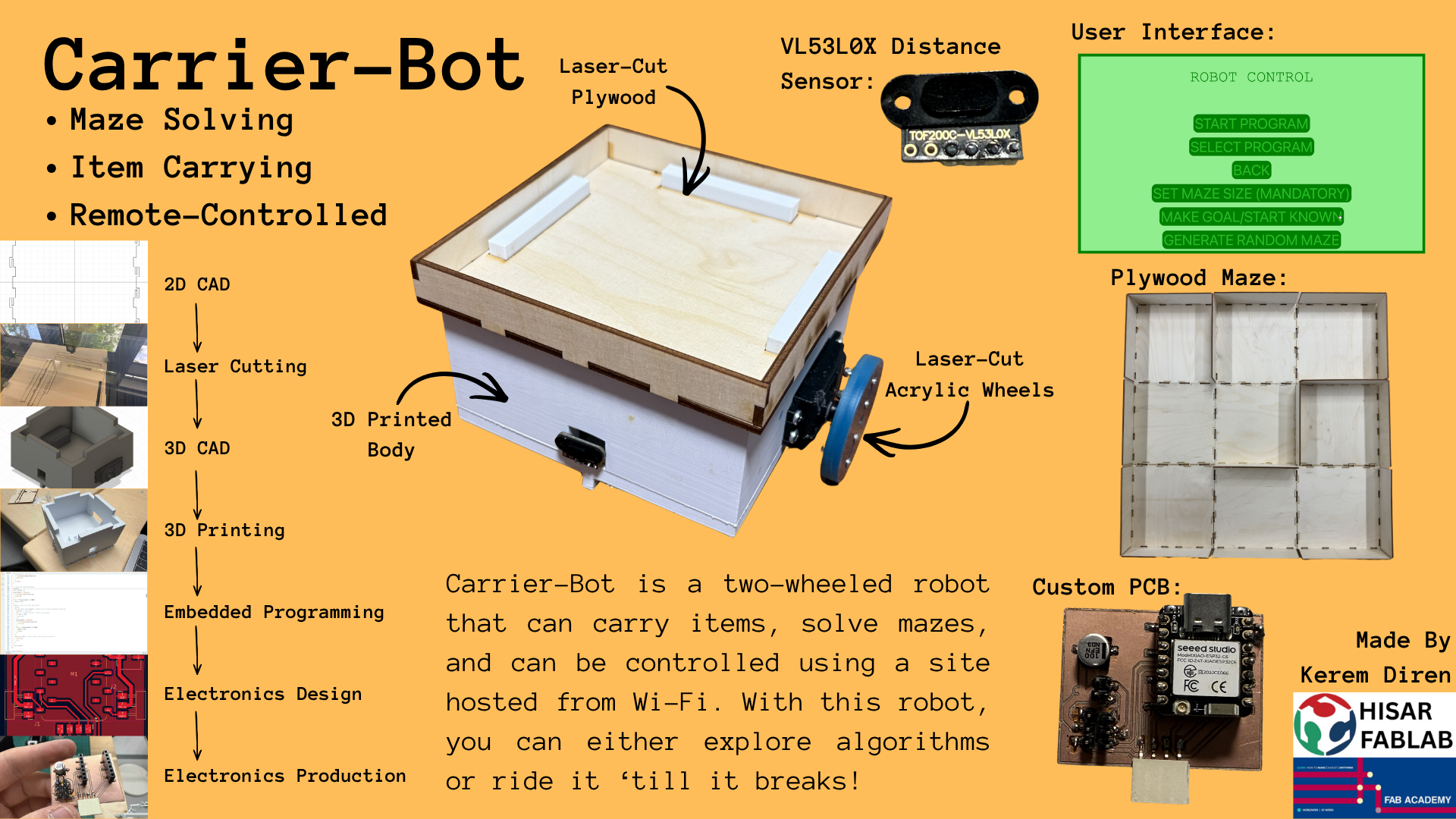
- Uploaded summary slide
- Uploaded video clip
What will it do?
My final project is named Carrier-Bot. It's basically a robot that can carry stuff. In addition, it can solve mazes. Before, I was thinking of making the robot more focused on carrying items; now, though, it is more focused on solving mazes. My final project also comes with a laser-cut customizable maze. I plan on adding multiple maze-solving algorithms so that the robot can demonstrate how they work. I also plan on making a random maze generation function, a function so that the robot knows the location of the goal beforehand (for relevant maze-solving programs), and a function to make the user control the robot. It'll be using a ToF distance sensor to get help for this.
Who has done what beforehand?
This Fab Academy student, Akash Edamana, did something similar to me. As in, he made a robot that can carry items and goes between two points.
Roombas are similar since they can navigate the floor by themselves.

What sources will you use?
I'll be using / have used:
- Kicad to design my PCB
- Inkscape to help with generating the toolpath of my PCB
- Mods to generate the toolpath of my PCB
- Fusion 360 to design an enclosure
- ChatGPT to get help when I need it (for learning, quickly finding information etc.) (I have mentioned it whenever I used it)
- Bambu Studio to slice my 3D design (the enclosure)
- Cuttle to design my maze and the item holding part of my robot (I used laser cutter for those two)
- Arduino IDE to write code
- HTML to generate a site from my XIAO ESP32C6 (which is a part of my PCB) to control the robot
- xTool Studio to use the laser cutter
What will you design?
I'll design / have designed:
- My PCB
- The site to control the robot
- The enclosure of my robot
- The item carrying part of my robot
- The 2D design for the wheels of my robot
- My maze
What materials and components will be used?
I'll be using / have used:
- 1 copper clad
- Some PLA
- Some 3mm plywood
- 2 continuous MG996R servos (with servo horns)
- 10 M3 bolts and 8 M3 nuts
- A polarized capacitor (CP_Elec_100uF_Panasonic_EEE-FN1E101UL)
- 4 horizontal pin sockets
- 8 vertical pin headers
- 8 M2 bolts and nuts
- 14 vertical pin slots
- 1 XIAO ESP32C6
- 1 VL53L0X
- 1 powerbank
- Some 6mm acrylic
- 1 female cable
- Some electrical tape
- 2 batteries (US18650VTC6)
Where will they come from?
They will come from the Fablab, Robotzade, DigiKey, Robotistan, and me (the powerbank, probably).
How much will they cost?
| Item | Quantity | Price (USD) | Price (TL) |
|---|---|---|---|
| Copper clad | ~12cm^2 | ~$0.6 | ~₺27 |
| PLA (filament) | ~200g | ~$4 | ~₺180 |
| 3mm plywood | 1740cm^3 | ~$5 | ~₺225 |
| MG996R servos (with horns) | 2 | $16 | ₺720 |
| M3 bolts | 10 | ~$2 | ~₺90 |
| M3 nuts | 8 | ~$1.5 | ~₺67.5 |
| Polarized capacitor (100uF Panasonic EEE-FN1E101UL) | 1 | $0.5 | ₺22.5 |
| Horizontal pin sockets | 4 | ~$1.5 | ~₺67.5 |
| Vertical pin headers | 8 | ~$1.5 | ~₺67.5 |
| M2 bolts and nuts | 8 | ~$1.5 | ~₺67.5 |
| Vertical pin slots | 14 | ~$2 | ~₺90 |
| XIAO ESP32C6 | 1 | $8 | ₺360 |
| VL53L0X sensor | 1 | $3.11 | ₺140 |
| Powerbank | 1 | $22.3 | ₺1000 |
| Acrylic | ~12cm^3 | ~$1 | ~₺45 |
| Female cable | 1 | $0.5 | ₺22.5 |
| Electrical tape | ~30cm | ~$0.2 | ~₺9 |
| US18650VTC6 batteries | 2 | $13 | ₺585 |
I got this table (and some of the values) from ChatGPT since I didn't know how to make one. Also, I used ₺45 per $1 for price conversion.
What parts and systems will be made?
PCB: The PCB will be designed and made by me. It'll have a XIAO ESP32C6 on it.
PCB-Servo-ToF: The PCB will connect to two servos and a ToF distance sensor through pin headers on it.
Wheel: I'll be creating wheels by laser-cutting acrylic. They'll be connected to the servos.
Enclosure: I'll design and 3D print an enclosure for the servos and the PCB.
Carrying-Part: I'll design and laser-cut 3mm plywood to make a carrying part to the robot so that it can carry items.
Enclosure-Carrying-Part: The carrying part will be able to slot into the enclosure to complete it.
Software-PCB: I'll write a program to control the robot by utilizing the servos and the ToF through the PCB. It will also be able to host a local HTML site through the PCB using Wi-Fi.
Enclosure-Servo: The servos will be screwed to the enclosure.
Maze: It will be made from 3mm plywood and will contain the robot.
What processes will be used?
2D CAD: I'll design files using Cuttle to be laser cut.
3D CAD: I'll design an enclosure for the robot to be 3D printed. I'll use Fusion 360 for this.
Embedded Programming: I'll write code from Arduino IDE to connect to a XIAO ESP32C6.
3D Printing: I'll print some of the designs I designed from 3D CAD.
Electronics Design: I'll design my PCB from Kicad.
Laser Cutting: I'll laser cut the design I made from 2D CAD.
Electronics Production: I'll mill the PCB I designed and will solder it according to the design.
Project Management: Although it is private, I do this to make good use of my time and deliver my project timely.
What questions need to be answered?
Will there be any lag between the website and the robot?
Can the robot move precisely in the maze?
Will the system integration work well?
Will the servos be enough to move the robot?
Will the robot be able to detect the goal?
Can the device survive a drop test?
Will the device be used as intended?
How will it be evaluated?
The website needs to successfully control the robot.
The robot needs to be able to change between maze-solving programs.
The robot needs to be able to detect the goal when it reaches it.
The robot needs to have the ability to carry items.
The robot needs to be able to move precisely in the maze.
The site needs to be able to generate random mazes.
The robot won't deteriorate easily (as in, it wont just break down in a few days).
Uploaded summary slide