Robot Operating System 3D scanner
Hero Shot
Summary
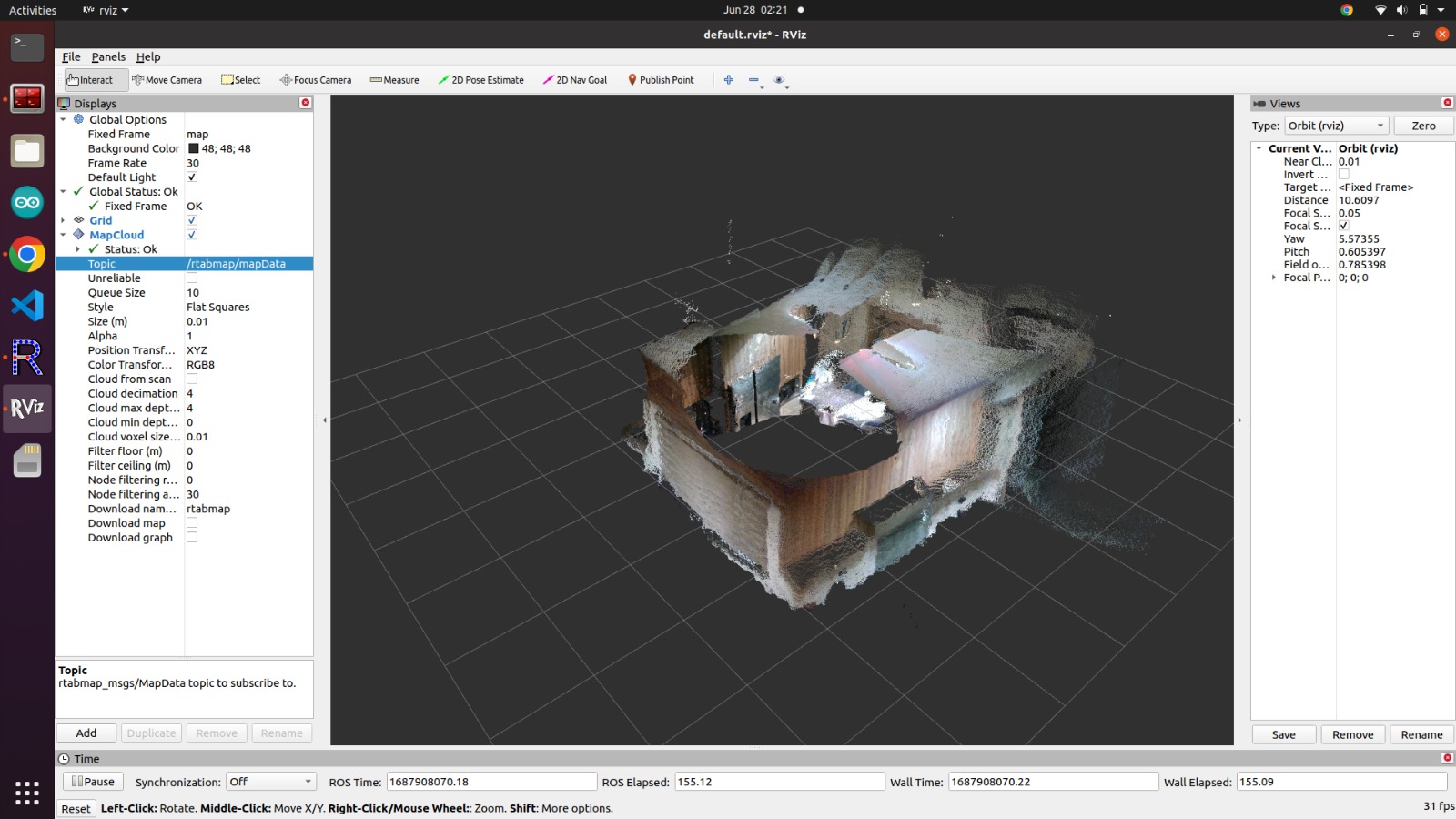
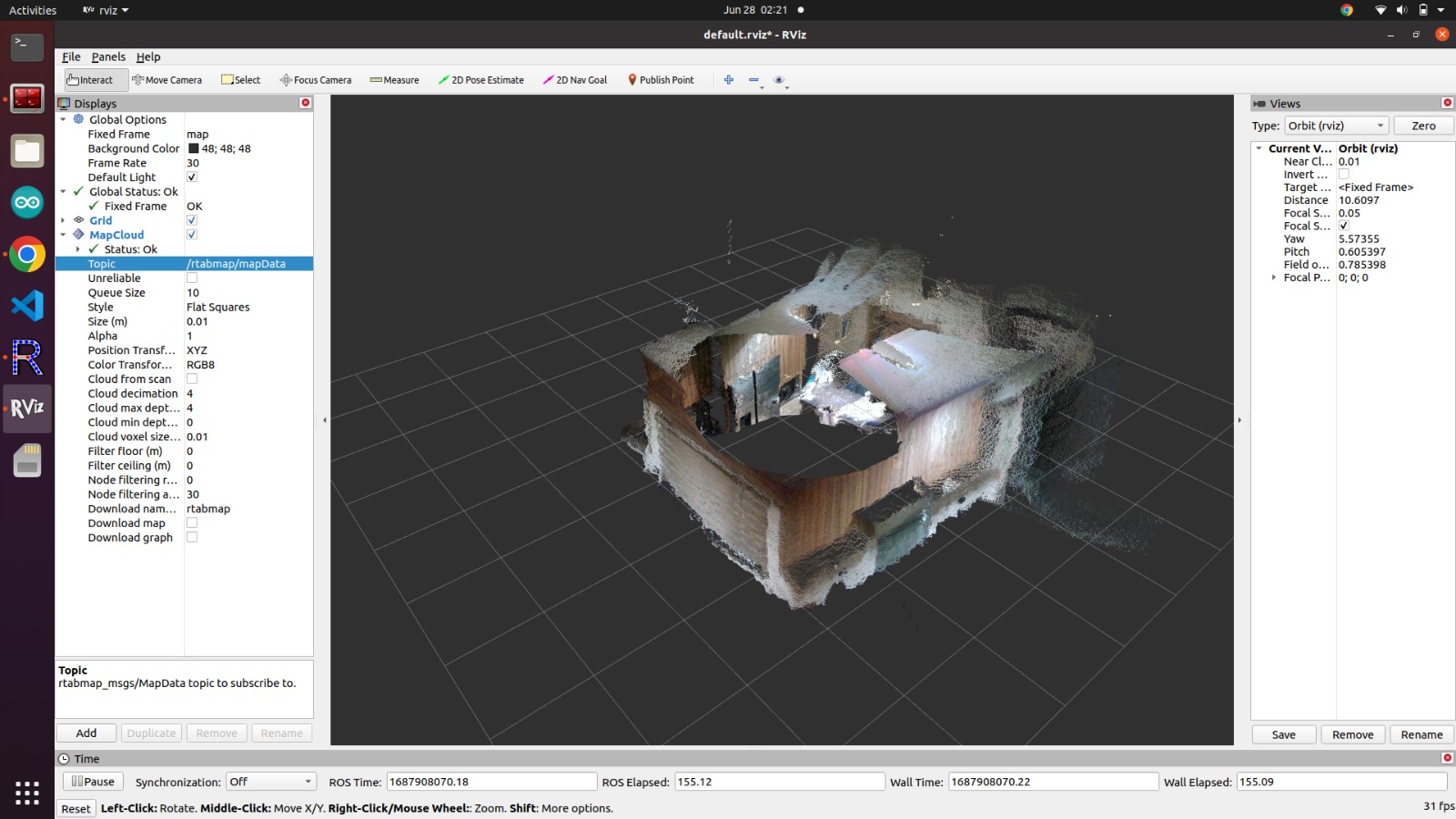
As part of my 3D scanning exploration and its relation to my final project, I used the Intel RealSense D435i camera to implement a SLAM (Simultaneous Localization and Mapping) algorithm using the Robot Operating System (ROS). I worked with the RTAB-Map algorithm, which fuses RGB data from the camera with IMU data to generate a 3D map of the environment. My plan is to eventually use this setup for developing the mapping and navigation stack for the half-moon desert rover project.
Work Process Detail
- Hardware Setup:
I began by setting up the Intel RealSense D435i, which includes an RGB-D camera and an IMU sensor. This camera is suitable for collecting depth information and orientation data for mapping purposes.
- Software Installation:
I installed ROS and the RTAB-Map package. RTAB-Map is a ROS-based algorithm designed for real-time 3D mapping and localization.
- Data Collection:
I configured the camera to capture RGB data and IMU data in real-time. The RTAB-Map algorithm utilized these inputs to create a detailed 3D map of the environment surrounding the camera.
- Testing and Analysis:
I ran multiple tests to ensure that the mapping process was accurate. I observed how the algorithm processed the depth data from the camera and combined it with the IMU’s orientation information to produce a coherent 3D map.


- Planning for Future Use:
I plan to use this mapping algorithm for my final project, where it will be integrated into the navigation stack for the rover. This setup will enable the rover to generate maps of its environment and navigate autonomously using those maps.
Learning Outcome
Working with the Intel RealSense D435i camera and implementing the RTAB-Map SLAM algorithm allowed me to gain practical experience in real-time mapping using ROS. I learned about the importance of fusing data from multiple sensors, such as RGB and IMU data, to produce an accurate 3D representation of the environment. This process also deepened my understanding of SLAM concepts, which will be essential for developing the navigation stack for my rover project. Overall, this experience has prepared me to tackle more complex mapping and navigation challenges in the future.