Final Project Servo Mechanism
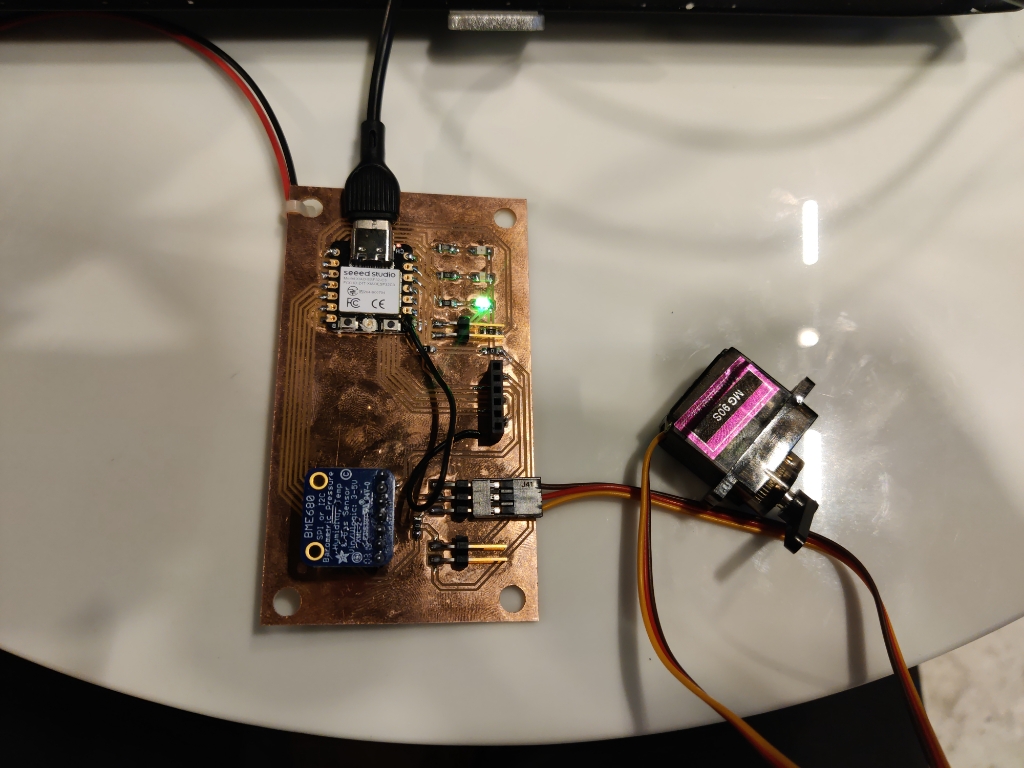
Hero Shot
Summary
For the output device assignment, I integrated a servo motor with my XIAO ESP32-C3 microcontroller. The goal was to test basic PWM-based control for mechanical movement, which is crucial for my final project—specifically for triggering physical actions like parachute release. This task gave me hands-on experience in working with digital output devices and real-time control logic.
Work Process Detail
1. Servo Motor Selection
- I used a standard SG90 servo motor, which is lightweight and ideal for compact applications like rockets and mechanical triggers.
- Operating voltage: 3V – 6V
- PWM signal control with 0–180° movement range

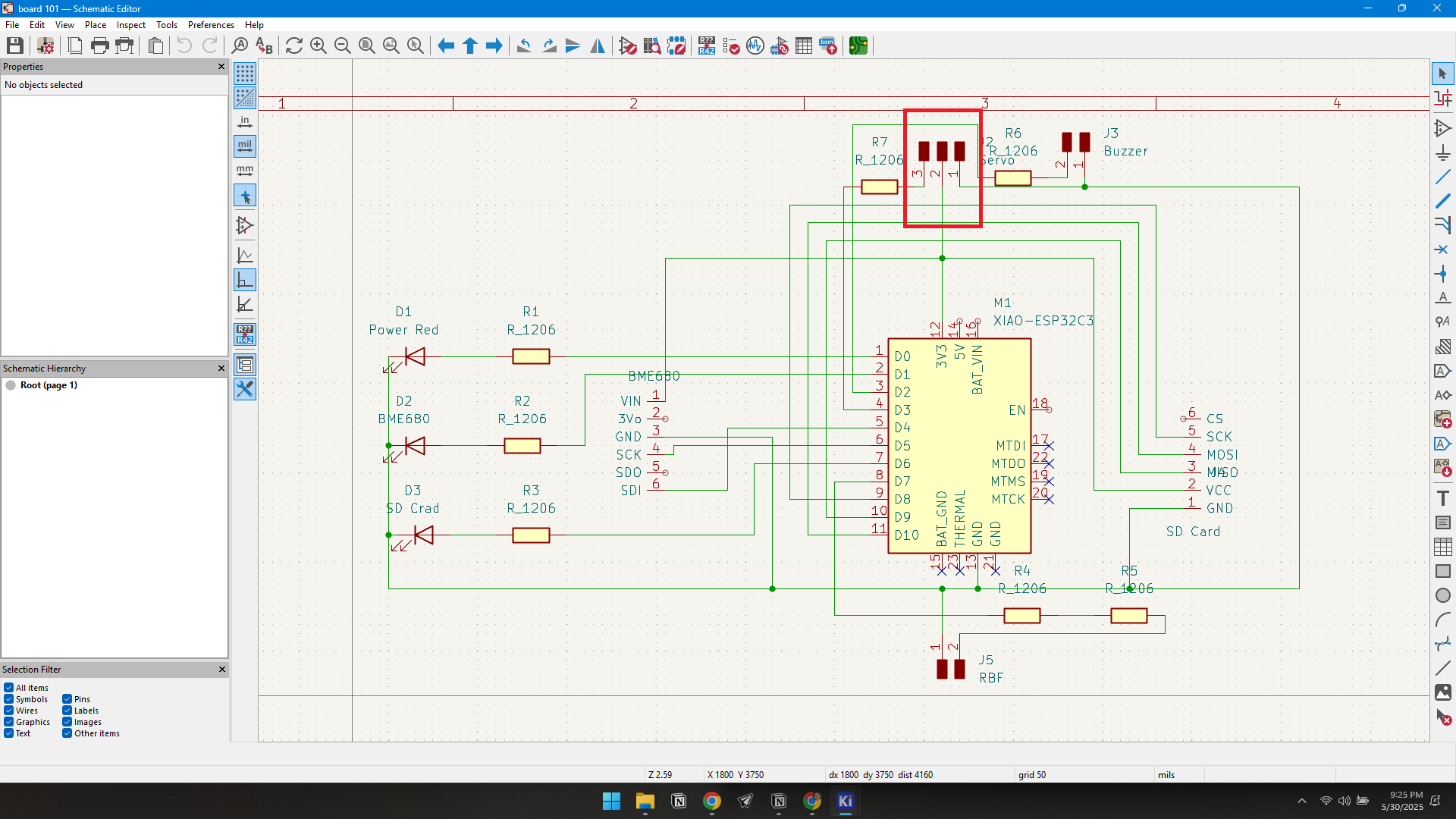
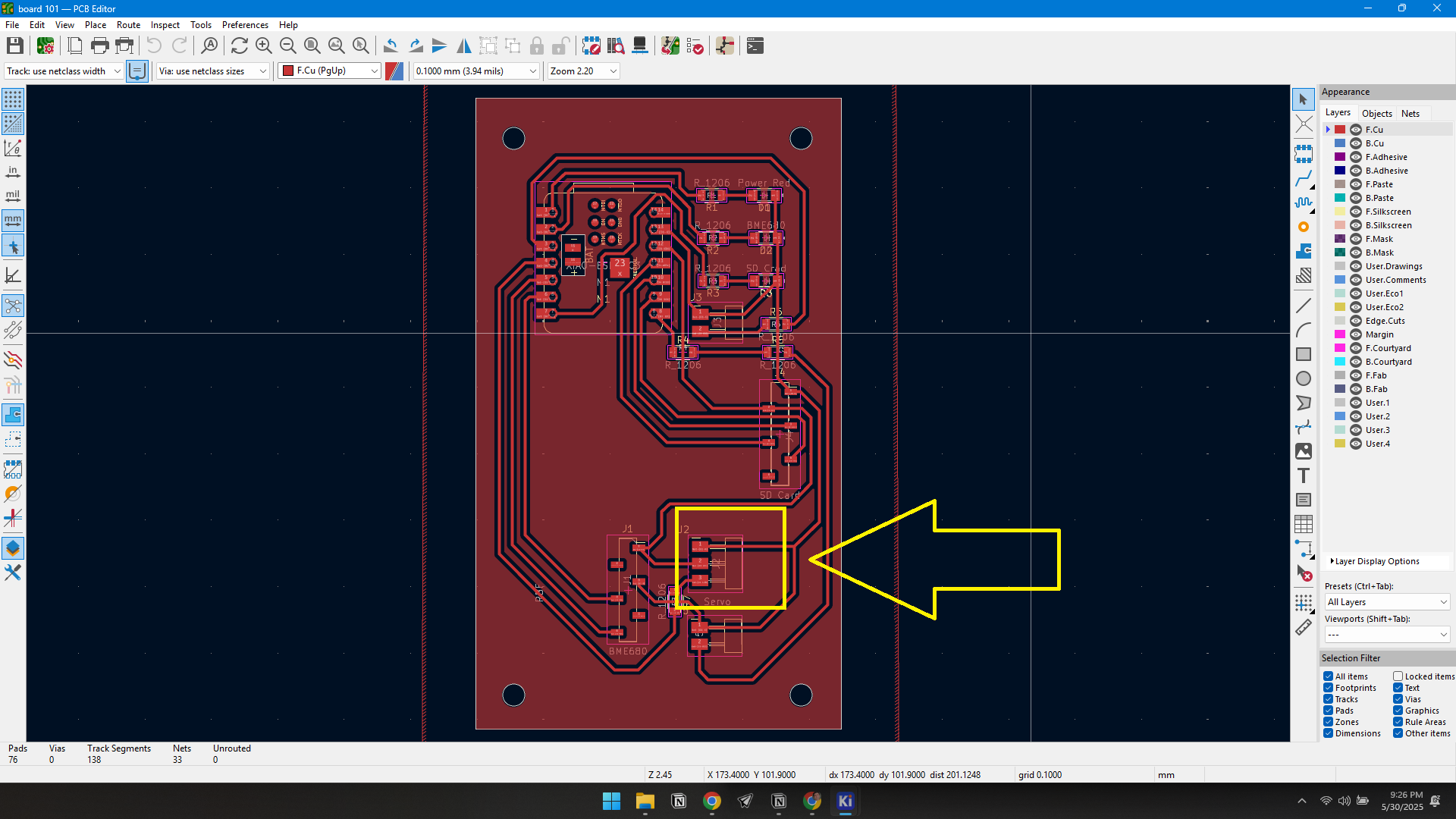
2. Circuit Setup
- Connected the servo signal pin to GPIO 3 on the XIAO ESP32-C3.
- Connected 5V power to the servo using an external power source to avoid overloading the microcontroller.
- GND lines of the ESP32, servo, and power source were all connected to ensure a common reference.
- [ESP32 GPIO 5] -------> [Servo Signal]
[3.3V External Power] --> [Servo VCC]
[Common Ground] ------> [Servo GND] + [ESP32 GND]
- [ESP32 GPIO 5] -------> [Servo Signal]


3. Code Implementation
- Used the ESP32Servo library to generate the required PWM signals.
- The servo was programmed to rotate between defined angles in a loop to simulate mechanical motion like locking/unlocking or latching.
#include <ESP32Servo.h>
Servo myServo; // create servo object
int servoPin = 5; // GPIO 3 on ESP32-C3
int angle = 0; // variable to store the servo position
void setup() {
Serial.begin(115200);
myServo.setPeriodHertz(50); // Standard 50 Hz servo
myServo.attach(servoPin, 500, 2400); // Min and Max pulse width in µs
}
void loop() {
// Sweep from 0 to 180
for (angle = 0; angle <= 180; angle += 1) {
myServo.write(angle);
delay(15);
}
// Sweep back from 180 to 0
for (angle = 180; angle >= 0; angle -= 1) {
myServo.write(angle);
delay(15);
}
}
4. Testing & Results
- Tested the servo sweep between 0° and 180°.
- Ensured reliable motion and repeatability.
- Confirmed that the servo can generate enough torque to trigger the mechanical latch for the parachute system.
Learning Outcome
From this task, I gained a clear understanding of:
- Using PWM to control servos with the ESP32-C3.
- Managing power distribution for motor-based output devices.
- Verifying signal stability and physical performance of actuators.
- Building a foundation for combining mechanical movement with sensor-based input logic.