For this week, we had to complete both a group assignment and an individual assignment. In the group assignment, we sent a message between two projects to demonstrate communication between devices. This involved setting up a network or bus system and ensuring proper data transmission and reception between the devices. We documented our work on the group work page and reflected on what we learned on our individual pages.
In the individual assignment, we designed, built, and connected wired or wireless nodes with network or bus addresses. These nodes included local input and/or output devices to interact with the network. The learning outcomes for this assignment included understanding and implementing communication protocols, designing and building functional nodes, and demonstrating their ability to communicate within a networked system.
Group Assignment
Group Assignment:
Task: Send a message between two projects.
Documentation: Document your work on the group work page.
Reflection: Reflect on your individual page about what you learned.
Note: Replace this placeholder text with specific details about your group's work, including the communication method used, challenges faced, and key takeaways.
Individual Assignment
For the individual assignment, I designed and implemented a wired network consisting of multiple nodes, each equipped with unique network addresses and connected to local input and output devices. The goal was to establish communication between the nodes using a bus protocol, enabling them to exchange data effectively. Each node was designed to include sensors for input and actuators for output, allowing interaction with the environment. This project involved designing the circuit, fabricating the PCB, programming the nodes, and testing the network to ensure reliable communication and functionality.
Building a Network Using UART
For this project, I decided to build a network using UART (Universal Asynchronous Receiver-Transmitter). UART is a hardware communication protocol that facilitates serial communication between devices. It is widely used in embedded systems and microcontrollers for its simplicity and reliability.
What is UART?
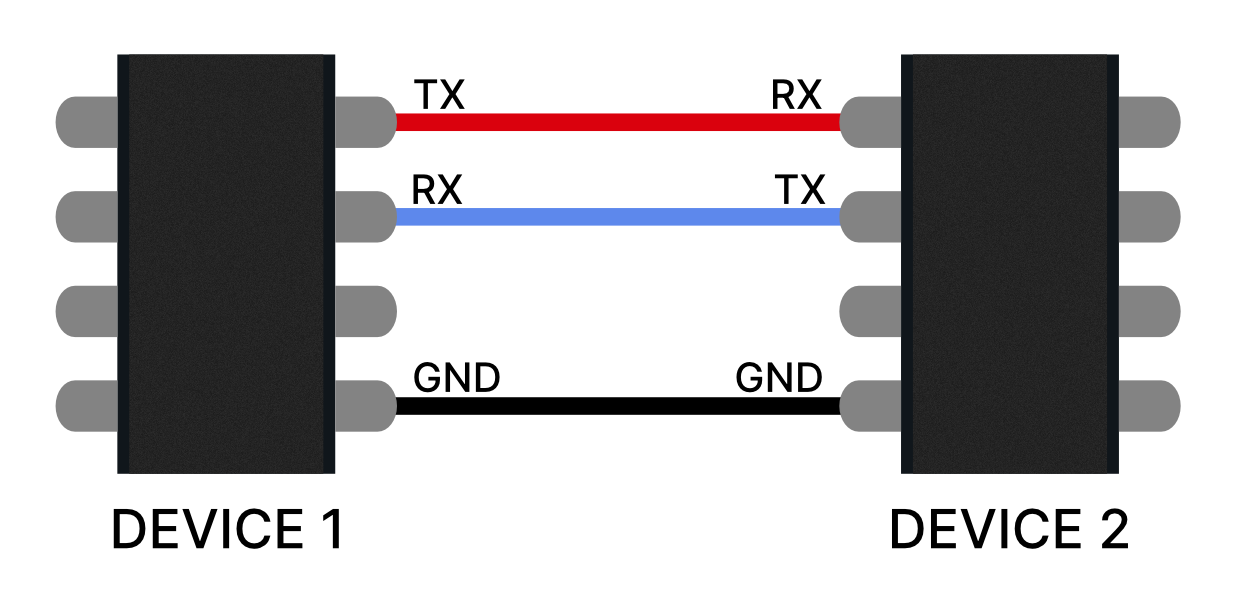
UART is a form of asynchronous serial communication where data is transmitted one bit at a time over a single communication line. It does not require a clock signal, as the sender and receiver agree on a common baud rate (bits per second) for communication. UART typically uses two lines for communication:
TX (Transmit): Sends data from the device to another device.
RX (Receive): Receives data from another device.
How UART Works
UART communication involves the following steps:
The sender converts parallel data (e.g., bytes) into a serial data stream.
The serial data is transmitted one bit at a time over the TX line.
The receiver reads the serial data from the RX line and converts it back into parallel data.
To ensure proper communication, both devices must use the same baud rate, data format (e.g., number of data bits, parity, and stop bits), and voltage levels.
Advantages of UART
Simple and easy to implement.
Requires only two communication lines (TX and RX).
Widely supported by microcontrollers and other devices.
Why I Chose UART
I chose UART for this project because it is a straightforward and efficient way to establish communication between multiple nodes in a network. Its asynchronous nature eliminates the need for a shared clock signal, simplifying the hardware design. Additionally, UART is well-suited for short-distance communication, making it ideal for this application.
Understanding UART Communication
After reading the site Soldered - What is the UART Communication Protocol, I gained a deeper understanding of how UART works, how the connections are made, and the concept of Baud rate. Below is a summary of the key points:
How UART Works
UART (Universal Asynchronous Receiver-Transmitter) is a protocol for asynchronous serial communication. It transmits data one bit at a time over a single communication line, without requiring a clock signal. Both devices must agree on the same Baud rate for successful communication.
Connections
UART communication requires two main lines:
TX (Transmit): Sends data from one device to another.
For this project, I decided to implement my own communication protocol to send messages between nodes in the network. The protocol was designed to transmit a string containing three key components:
Sender ID: The unique identifier of the node sending the message.
Message: The actual data or command being transmitted.
Recipient ID: The unique identifier of the node intended to receive the message.
Protocol Structure
The message format was defined as follows:
[SenderID]|[Message]|[RecipientID]
Each component is separated by a pipe (|) character to make parsing the message straightforward. For example, a message from node 01 to node 03 with the content Hello would look like this:
01|Hello|03
The Network
Master-Slave Configuration
For this UART network, a master and multiple slave configuration was implemented. This setup is necessary to ensure proper communication and coordination between the nodes in the network. In a UART network, where multiple devices are connected, it is crucial to have a central controller (master) to manage communication and prevent data collisions.
Why Master-Slave Configuration?
Centralized Control: The master acts as the central controller, initiating communication and ensuring that only one device transmits data at a time.
Collision Avoidance: By having the master manage communication, the risk of data collisions is minimized, as slaves only respond when addressed by the master.
Simplicity: This configuration simplifies the design and implementation of the communication protocol, as the slaves do not need to handle complex arbitration mechanisms.
Circuit Diagram
The following circuit diagram illustrates the master-slave configuration for the UART network:
Diagram showing the master and multiple slaves connected via UART.
How It Works
Master Initiates Communication: The master sends a message to a specific slave by including the slave's unique ID in the message.
Slave Responds: The addressed slave processes the message and sends a response back to the master, if required.
Communication: When a slave needs to send data to another slave, it first sends the message to the master. The master then checks if the message is addressed to itself or if it should be relayed to all slaves. If the message is intended for another slave, the master forwards it to the addressed slave, which then processes the message and responds accordingly.
#include <Adafruit_NeoPixel.h>
#define LED_PIN 12
#define POWER_PIN 11
#define NUMPIXELS 1
Adafruit_NeoPixel pixels(NUMPIXELS, LED_PIN, NEO_GRB + NEO_KHZ800);
int id = 1;
String message = "";
void setup() {
Serial.begin(9600);
Serial1.begin(115200);
pinMode(POWER_PIN, OUTPUT);
digitalWrite(POWER_PIN, HIGH);
pixels.begin();
pixels.setBrightness(50);
}
void loop() {
if (Serial.available() > 0) {
String myInput = Serial.readString();
myInput = id + ": " + myInput;
Serial1.println(myInput);
}
if (Serial1.available() > 0) {
String networkIncoming = Serial1.readString();
int specialCharIndex = networkIncoming.indexOf('@');
Serial.println(networkIncoming);
if (specialCharIndex != -1) {
message = networkIncoming.substring(0, specialCharIndex);
String destination = networkIncoming.substring(specialCharIndex + 1);
int receiver = destination.toInt();
if (receiver == id) {
int r, g, b;
//int colon = message.indexOf(';');
int firstComma = message.indexOf(',');
int secondComma = message.indexOf(',', firstComma + 1);
Serial.println("message= " + message + ", receiver=" + String(receiver));
if (firstComma != -1 && secondComma != -1) {
r = message.substring(0, firstComma).toInt();
Serial.println(r);
g = message.substring(firstComma + 1, secondComma).toInt();
b = message.substring(secondComma + 1).toInt();
setColor(r, g, b);
}
}else{
Serial.println("Relaying message...");
Serial1.println(networkIncoming);
//Serial.println("Not my message...");
}
message = "";
}
}
}
void setColor(int r, int g, int b) {
pixels.setPixelColor(0, pixels.Color(r, g, b));
pixels.show();
}
Advantages of the Custom Protocol
Simple and easy to implement.
Customizable to meet specific project requirements.
Provides a clear structure for message transmission and routing.
Challenges and Considerations
Ensuring reliable message delivery in the presence of noise or interference.
Handling cases where multiple nodes attempt to send messages simultaneously.
Optimizing the protocol for speed and efficiency in larger networks.
Second Iteration of the Protocol
After observing delays in node responses and the need for a more robust protocol to handle additional sensors, we implemented a new protocol structure. The updated protocol is designed to be faster and more flexible, allowing nodes to process commands efficiently and implement custom responses. The new protocol format is as follows:
<COMMAND>:<DATA>@<TO_ID>#<FROM_ID>;
Each component of the protocol serves a specific purpose:
COMMAND: Specifies the action or operation to be performed (e.g., "SET", "GET", "PING").
DATA: Contains the data or parameters associated with the command.
TO_ID: The unique identifier of the recipient node.
FROM_ID: The unique identifier of the sender node.
; Marks the end of the message.
For example, a message to set the color of a node with ID 02 to red (255,0,0) from node 01 would look like this:
COLOR:255,0,0@02#01;
Advantages of the New Protocol
Faster processing due to a simplified and structured format.
Supports custom commands for enhanced flexibility.
Clear separation of components for easier parsing and debugging.
Implementation
The updated protocol was implemented in the nodes' firmware. Below is the updated code:
#include <Adafruit_NeoPixel.h>
#define LED_PIN 12
#define POWER_PIN 11
#define NUMPIXELS 1
Adafruit_NeoPixel pixels(NUMPIXELS, LED_PIN, NEO_GRB + NEO_KHZ800);
int id = 1;
String message = "";
void setup() {
Serial.begin(9600);
Serial1.begin(115200);
pinMode(POWER_PIN, OUTPUT);
digitalWrite(POWER_PIN, HIGH);
pixels.begin();
pixels.setBrightness(50);
}
void loop() {
// Forward user input with FROM_ID tagging
if (Serial.available() > 0) {
String myInput = Serial.readStringUntil('\n');
myInput.trim();
if (myInput.indexOf("@")<0 || myInput.indexOf("#") < 0) {
myInput += "@0#" + String(id); // Add receiver=0 (broadcast) and sender
}
myInput += ";"; // Ensure the message ends correctly
Serial1.println(myInput);
}
// Receive network message
if (Serial1.available() > 0) {
String incoming = Serial1.readStringUntil(';'); // Read until semicolon
incoming.trim();
Serial.println("Raw: " + incoming);
// Extract command
int colonIndex = incoming.indexOf(':');
int atIndex = incoming.indexOf('@');
int hashIndex = incoming.indexOf('#');
if (colonIndex == -1 || atIndex == -1 || hashIndex == -1) return;
String command = incoming.substring(0, colonIndex);
String data = incoming.substring(colonIndex + 1, atIndex);
int toID = incoming.substring(atIndex + 1, hashIndex).toInt();
int fromID = incoming.substring(hashIndex + 1).toInt();
Serial.println("Command: " + command);
Serial.println("Data: " + data);
Serial.println("To ID: " + String(toID));
Serial.println("From ID: " + String(fromID));
if (toID == id || toID == 0) {
dispatchCommand(command, data);
} else {
Serial.println("Not my message...");
}
}
}
void dispatchCommand(String command, String data) {
if (command == "COLOR") {
int firstComma = data.indexOf(',');
int secondComma = data.indexOf(',', firstComma + 1);
if (firstComma == -1 || secondComma == -1) return;
int r = data.substring(0, firstComma).toInt();
int g = data.substring(firstComma + 1, secondComma).toInt();
int b = data.substring(secondComma + 1).toInt();
Serial.println("Setting color to R:" + String(r) + " G:" + String(g) + " B:" + String(b));
setColor(r, g, b);
}
// Add more commands like BUZZ, MOVE, etc. here:
else {
Serial.println("Unknown command: " + command);
}
}
void setColor(int r, int g, int b) {
pixels.setPixelColor(0, pixels.Color(r, g, b));
pixels.show();
}
This updated implementation ensures faster response times and allows nodes to handle custom commands effectively. The protocol's flexibility also makes it easier to expand the network with additional features in the future.
The code above is the same for all slaves, for the master it needed one modification to allow the mater to redirect incoming data to other slaves if a slave is attempting to communicate with a slave.
if (toID == id || toID == 0) {
dispatchCommand(command, data);
} else {
Serial.println("Relaying message...");
Serial1.println(incoming + ";"); // reappend delimiter
//Serial.println("Not my message...");
}
In this case, the master will relay the message to the slave with the ID specified in the message. The master will also add a semicolon at the end of the message to ensure that the slave can read it correctly.
Controlling nodes in the network
After this step the slaves and mater can implemet their own commands to respond to.
Implementing Commands for Master and Slaves
After the main protocol was implemented, the master and slaves were programmed to listen for specific commands and act upon them. This allowed each node to perform unique tasks based on the received instructions. In this system, the master node was equipped with an RFID scanner, while node 3 had an LCD display attached to it. The goal was to automatically send scanned RFID information from the master to node 3 for display.
Master Node Implementation
The master node was programmed to read data from the RFID scanner and send it to node 3 using the custom protocol. The RFID data was formatted as a message and transmitted with the appropriate recipient ID.
/*
* ---------------------------------------
* ---------------------------------------
* MFRC522 Seeed Studio
* Reader/PCD Xiao-RP2040
* Signal Pin Pin
* ---------------------------------------
* RST/Reset RST D1
* SPI SS SDA(SS) D2
* SPI MOSI MOSI D10 / MOSI
* SPI MISO MISO D9 / MISO
* SPI SCK SCK D8 / SCK
*
*
*/
#include <SPI.h>
#include <MFRC522.h>
#define SS_PIN D2
#define RST_PIN D1
#include <Adafruit_NeoPixel.h>
#define LED_PIN 12
#define POWER_PIN 11
#define NUMPIXELS 1
const int vibrator = D0;
Adafruit_NeoPixel pixels(NUMPIXELS, LED_PIN, NEO_GRB + NEO_KHZ800);
int id = 1;
String message = "";
// --- Motor Control State ---
unsigned long motorStartTime = 0;
unsigned long lastToggleTime = 0;
unsigned long motorDuration = 0;
unsigned long toggleInterval = 0;
bool motorRunning = false;
bool motorState = false;
int motorPin = 0;
MFRC522 rfid(SS_PIN, RST_PIN); // Instance of the class
// Init array that will store new NUID
byte nuidPICC[4];
void setup() {
pinMode(vibrator, OUTPUT);
SPI.begin(); // Init SPI bus
rfid.PCD_Init(); // Init MFRC522
Serial.begin(9600);
Serial1.begin(115200);
pinMode(POWER_PIN, OUTPUT);
digitalWrite(POWER_PIN, HIGH);
pixels.begin();
pixels.setBrightness(50);
digitalWrite(vibrator, HIGH);
delay(1000);
digitalWrite(vibrator, LOW);
delay(500);
digitalWrite(vibrator, HIGH);
delay(1000);
digitalWrite(vibrator, LOW);
delay(1000);
digitalWrite(vibrator, HIGH);
}
void loop() {
updateMotorPulse();
// Forward user input with FROM_ID tagging
if (Serial.available() > 0) {
String myInput = Serial.readStringUntil('\n');
myInput.trim();
myInput += (String)"#"+id+(String)";"; // Ensure the message ends correctly
Serial1.println(myInput);
}
if(rfid.PICC_IsNewCardPresent()){ // if there is new card
if(rfid.PICC_ReadCardSerial()){
Serial.print(F("PICC type: "));
MFRC522::PICC_Type piccType = rfid.PICC_GetType(rfid.uid.sak);
Serial.println(rfid.PICC_GetTypeName(piccType));
// Check is the PICC of Classic MIFARE type
if (piccType != MFRC522::PICC_TYPE_MIFARE_MINI &&
piccType != MFRC522::PICC_TYPE_MIFARE_1K &&
piccType != MFRC522::PICC_TYPE_MIFARE_4K) {
Serial.println(F("Your tag is not of type MIFARE Classic."));
return;
}
if (rfid.uid.uidByte[0] != nuidPICC[0] ||
rfid.uid.uidByte[1] != nuidPICC[1] ||
rfid.uid.uidByte[2] != nuidPICC[2] ||
rfid.uid.uidByte[3] != nuidPICC[3] ) {
Serial.println(F("A new card has been detected."));
// Store NUID into nuidPICC array
for (byte i = 0; i < 4; i++) {
nuidPICC[i] = rfid.uid.uidByte[i];
}
String dat = decToString(rfid.uid.uidByte, rfid.uid.size);
dat = "DISPLAY:"+dat+"@3#1";
Serial1.println(dat);
Serial.println(dat);
Serial.println(F("The NUID tag is:"));
Serial.print(F("In hex: "));
printHex(rfid.uid.uidByte, rfid.uid.size);
Serial.println();
Serial.print(F("In dec: "));
printDec(rfid.uid.uidByte, rfid.uid.size);
Serial.println();
}
else Serial.println(F("Card read previously."));
// Halt PICC
rfid.PICC_HaltA();
// Stop encryption on PCD
rfid.PCD_StopCrypto1();
}
}
// Receive network message
if (Serial1.available() > 0) {
String incoming = Serial1.readStringUntil(';'); // Read until semicolon
incoming.trim();
Serial.println("Raw: " + incoming);
// Extract command
int colonIndex = incoming.indexOf(':');
int atIndex = incoming.indexOf('@');
int hashIndex = incoming.indexOf('#');
if (colonIndex == -1 || atIndex == -1 || hashIndex == -1) return;
String command = incoming.substring(0, colonIndex);
String data = incoming.substring(colonIndex + 1, atIndex);
int toID = incoming.substring(atIndex + 1, hashIndex).toInt();
int fromID = incoming.substring(hashIndex + 1).toInt();
Serial.println("Command: " + command);
Serial.println("Data: " + data);
Serial.println("To ID: " + String(toID));
Serial.println("From ID: " + String(fromID));
if (toID == id || toID == 0) {
dispatchCommand(command, data);
} else {
Serial.println("Relaying message...");
Serial1.println(incoming + ";"); // reappend delimiter
//Serial.println("Not my message...");
}
}
}
void dispatchCommand(String command, String data) {
if (command == "COLOR") {
int firstComma = data.indexOf(',');
int secondComma = data.indexOf(',', firstComma + 1);
if (firstComma == -1 || secondComma == -1) return;
int r = data.substring(0, firstComma).toInt();
int g = data.substring(firstComma + 1, secondComma).toInt();
int b = data.substring(secondComma + 1).toInt();
Serial.println("Setting color to R:" + String(r) + " G:" + String(g) + " B:" + String(b));
setColor(r, g, b);
}
if(command == "VIBRATE"){
int firstComma = data.indexOf(',');
if(firstComma == -1) return;
int duration = data.substring(0, firstComma).toInt();
int freq = data.substring(firstComma + 1).toInt();
startMotorPulse(vibrator, freq, duration); // Motor on pin 9, 5Hz for 3s
}
// Add more commands like BUZZ, MOVE, etc. here:
else {
Serial.println("Unknown command: " + command);
}
}
void setColor(int r, int g, int b) {
pixels.setPixelColor(0, pixels.Color(r, g, b));
pixels.show();
}
void startMotorPulse(int pin, float frequency, unsigned long durationMs) {
motorPin = pin;
pinMode(motorPin, OUTPUT);
toggleInterval = 1000.0 / (frequency * 2); // Half-period in ms
motorDuration = durationMs;
motorStartTime = millis();
lastToggleTime = 0;
motorRunning = true;
motorState = false; // Start OFF
digitalWrite(motorPin, HIGH);
}
// Call this repeatedly inside loop()
void updateMotorPulse() {
if (!motorRunning) return;
unsigned long currentTime = millis();
// Check if it's time to toggle
if (currentTime - lastToggleTime >= toggleInterval) {
motorState = !motorState;
digitalWrite(motorPin, motorState);
lastToggleTime = currentTime;
}
// Check if duration expired
if (currentTime - motorStartTime >= motorDuration) {
digitalWrite(motorPin, HIGH); // Ensure motor is off
motorRunning = false;
}
}
/**
* Helper routine to dump a byte array as hex values to Serial.
*/
void printHex(byte *buffer, byte bufferSize) {
for (byte i = 0; i < bufferSize; i++) {
Serial.print(buffer[i] < 0x10 ? " 0" : " ");
Serial.print(buffer[i], HEX);
}
}
// TO STRING
String decToString(byte *buffer, byte bufferSizer){
String dat = "";
for(byte i = 0; i < bufferSizer; i++){
dat += " "+String((char)buffer[i], DEC);
}
return dat;
}
/**
* Helper routine to dump a byte array as dec values to Serial.
*/
void printDec(byte *buffer, byte bufferSize) {
for (byte i = 0; i < bufferSize; i++) {
Serial.print(' ');
Serial.print(buffer[i], DEC);
}
}
Node 3 Implementation
Node 3 was programmed to listen for the DISPLAY command. When it received a message with this command, it extracted the data (RFID UID) and displayed it on the attached LCD screen.