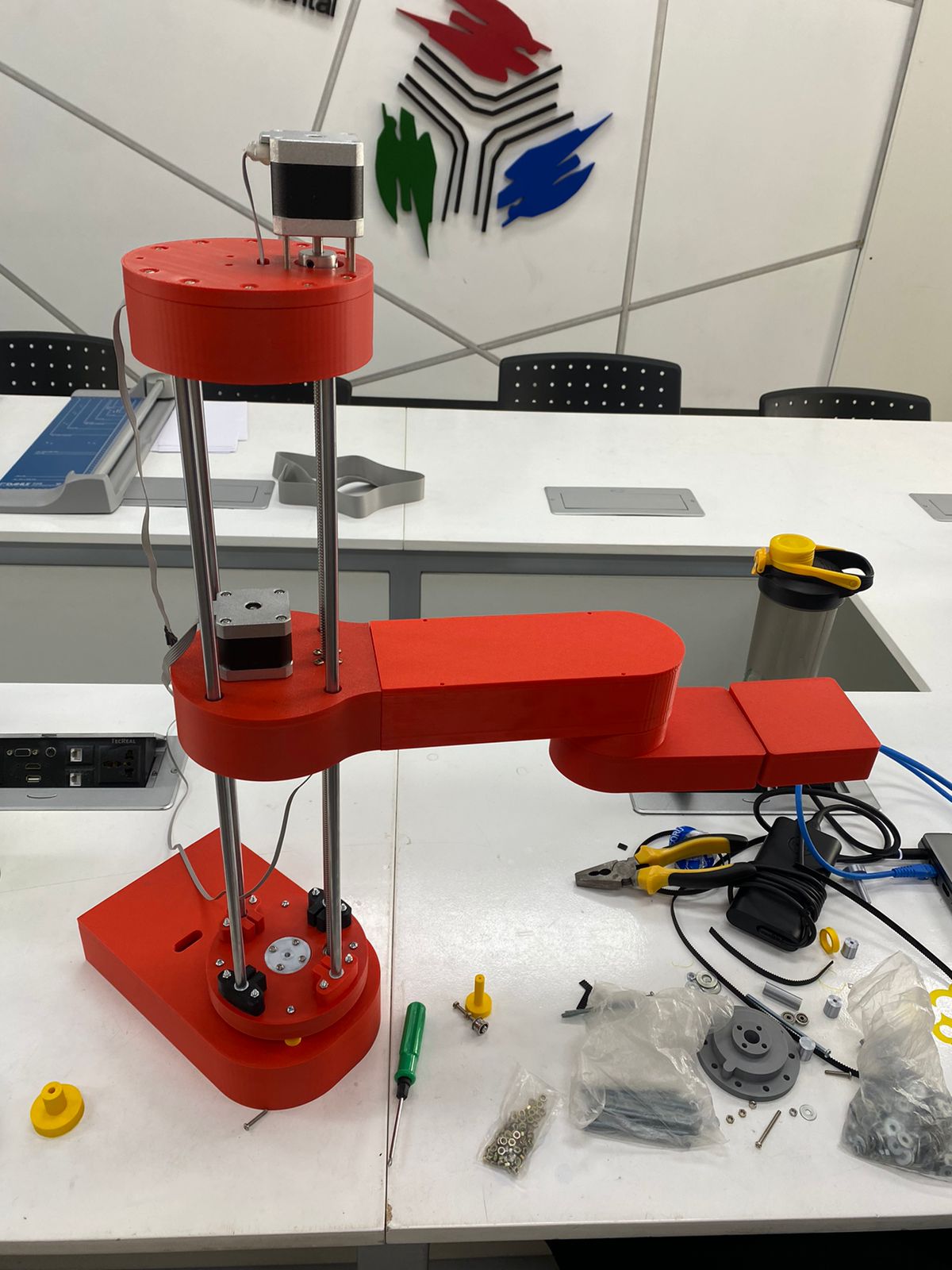
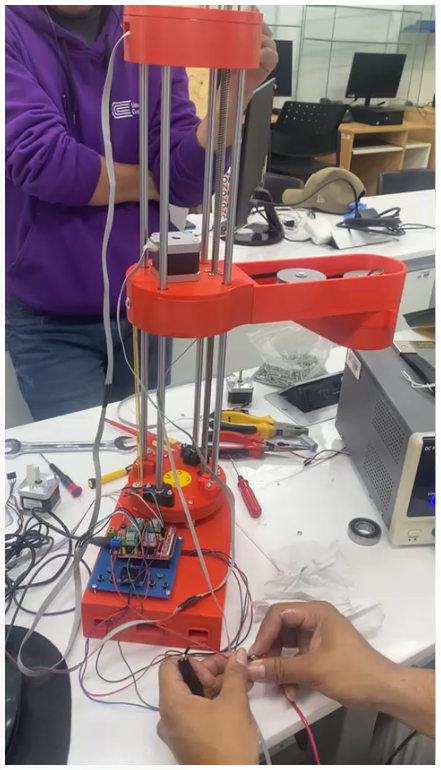
It is a small-scale welding robot that embodies the automation of a welding robotic arm for the maintenance processes of the mantles of crushers in mining
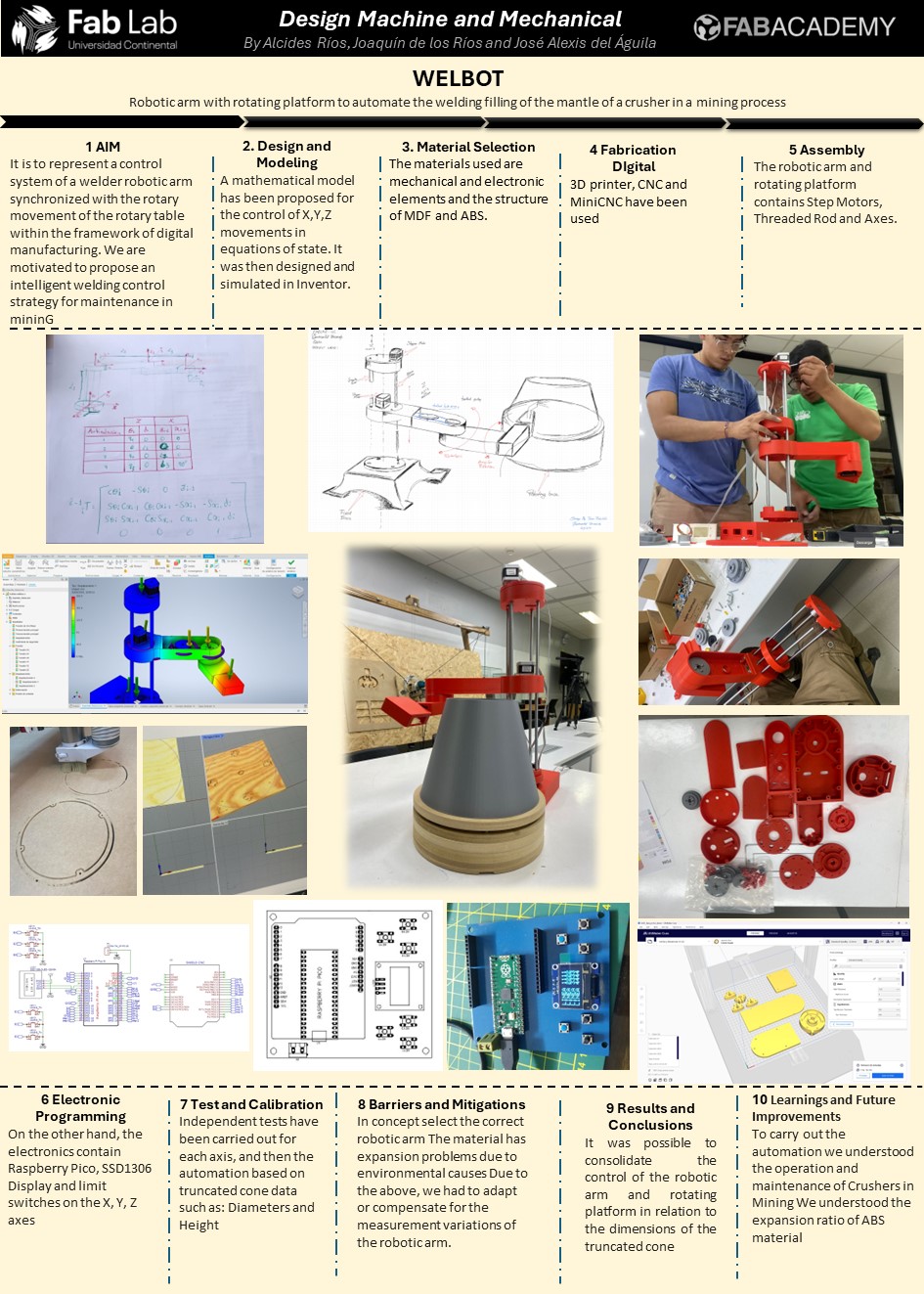
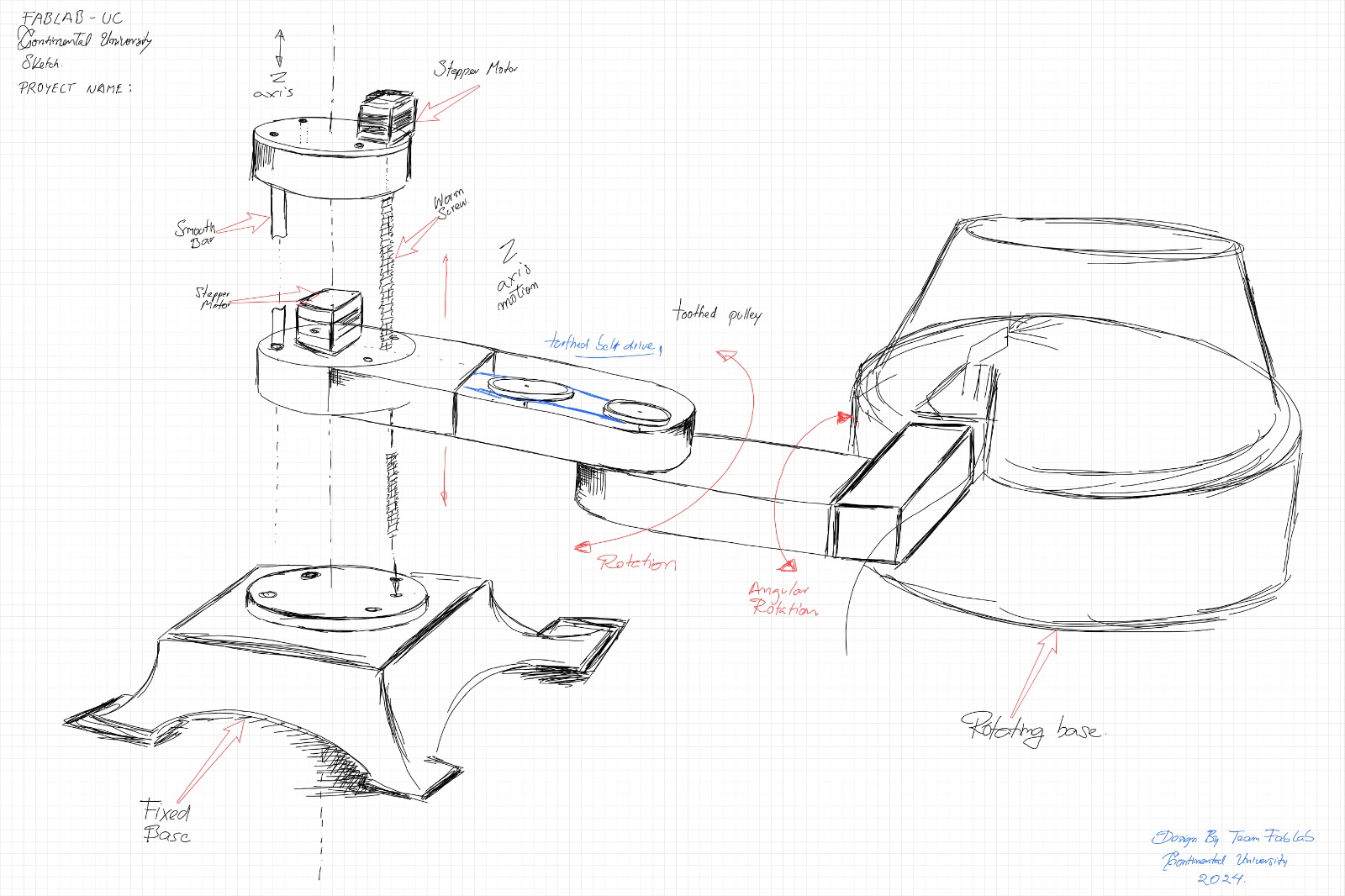
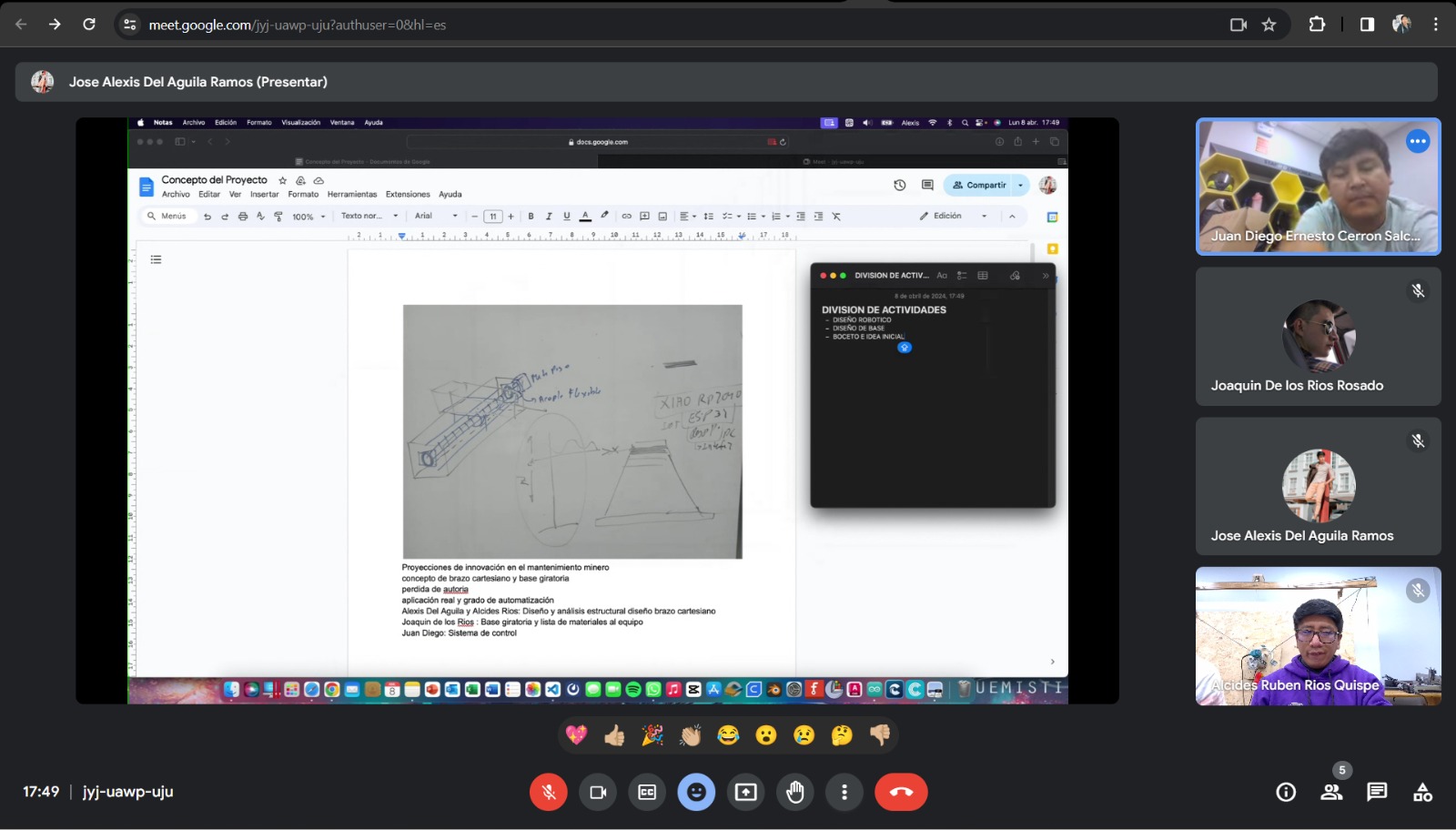
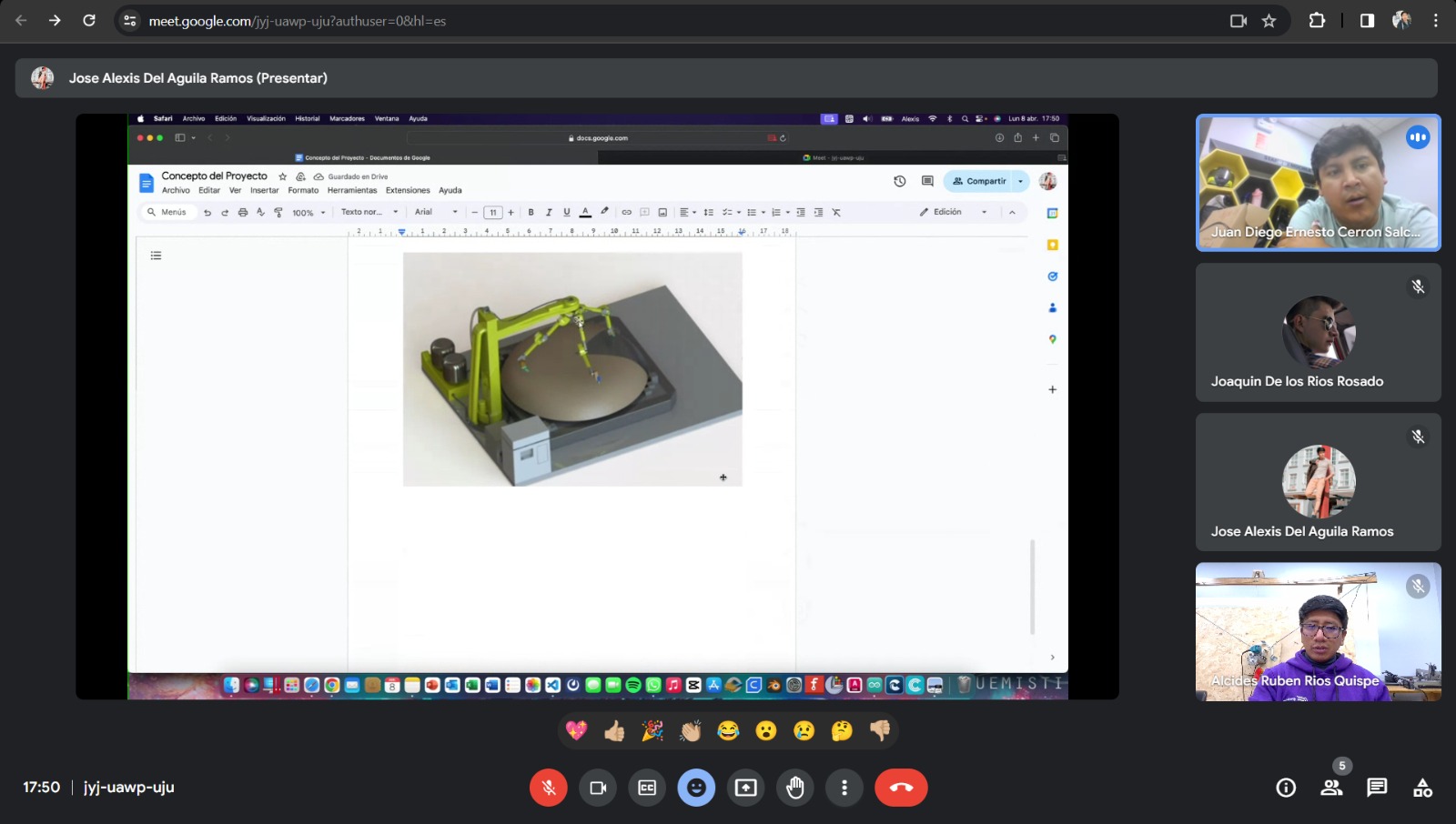
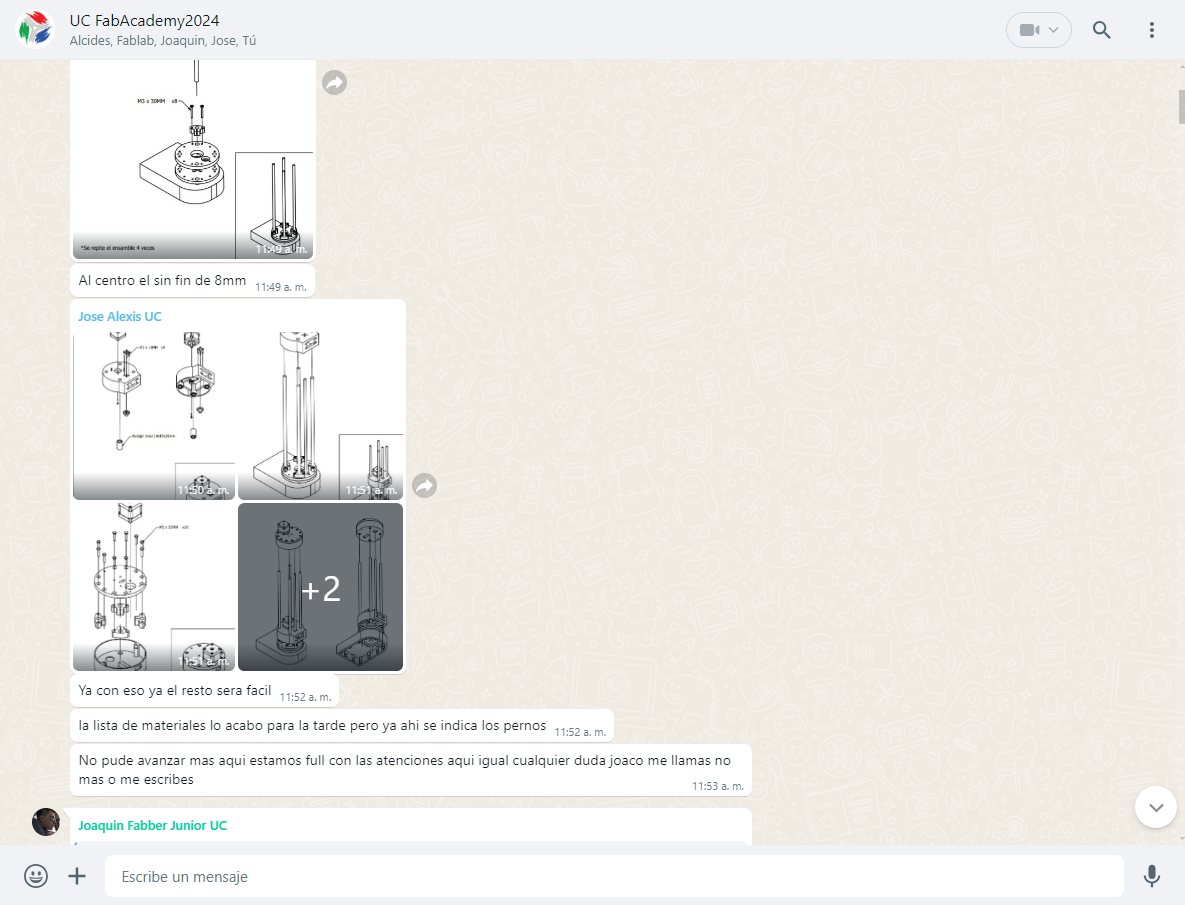
For this activity, we decided to develop a scale machine for welding the mantles of crushers in mining processes. Here, the initial sketch and the coordination meeting (Google Meet) from Cusco, Arequipa, and Huancayo are shown. Additionally, we created a WhatsApp group to quickly share information.
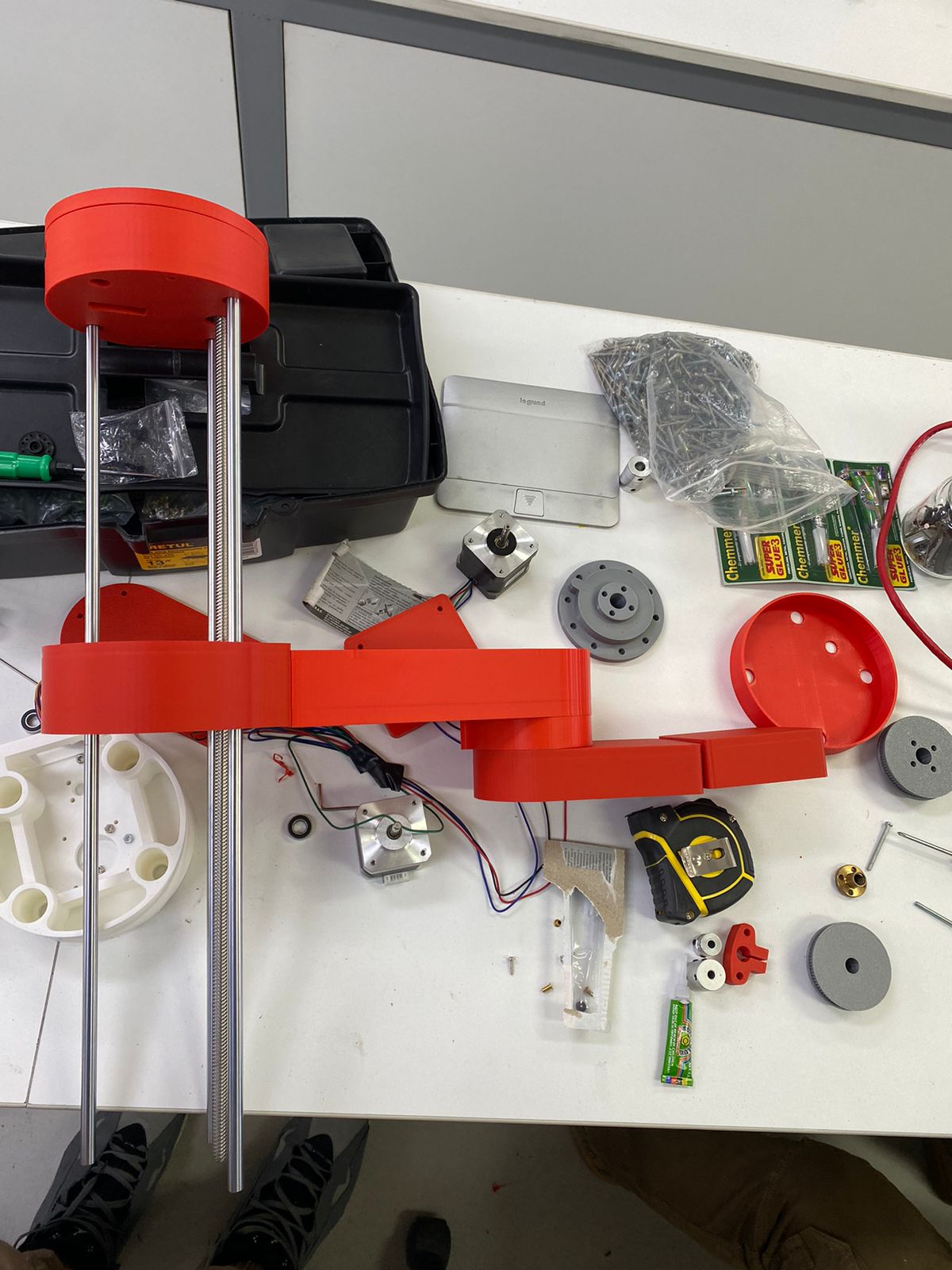
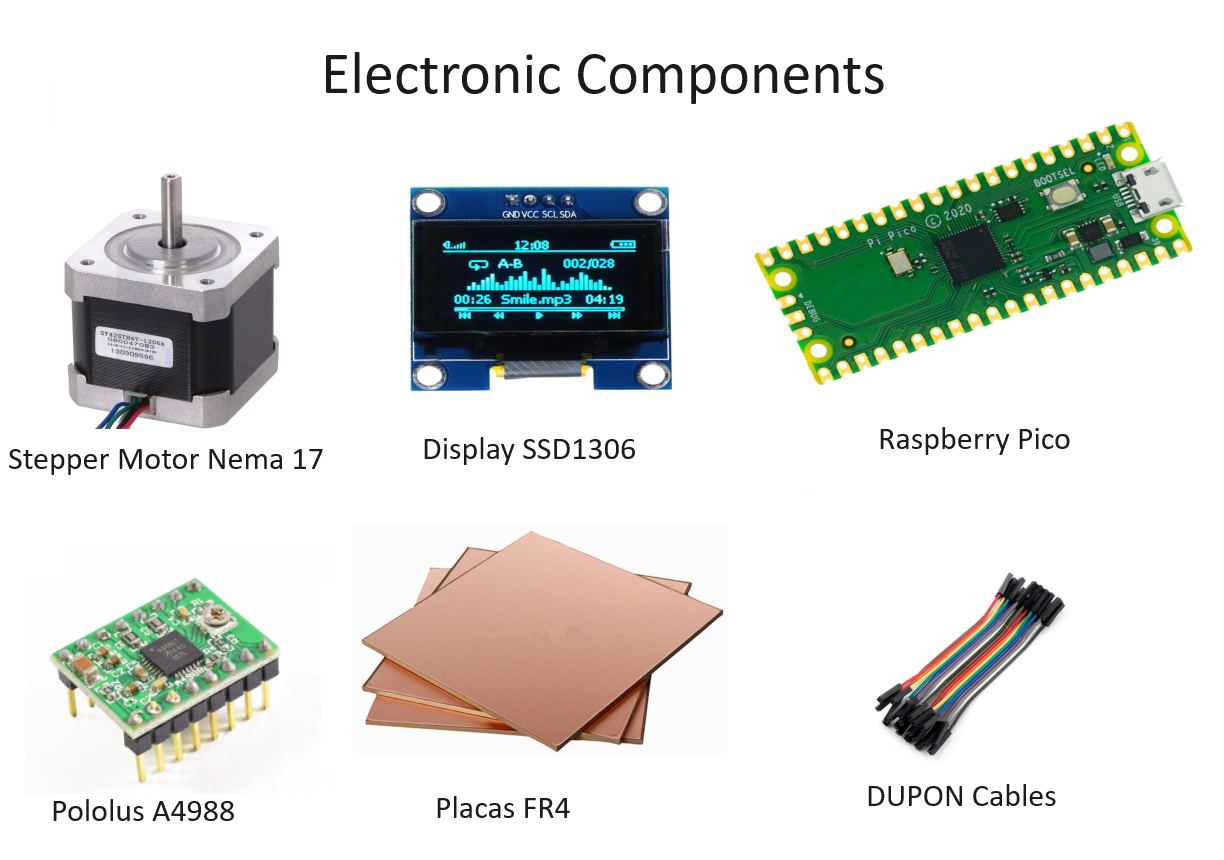
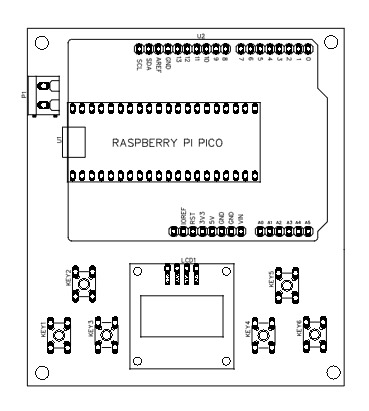
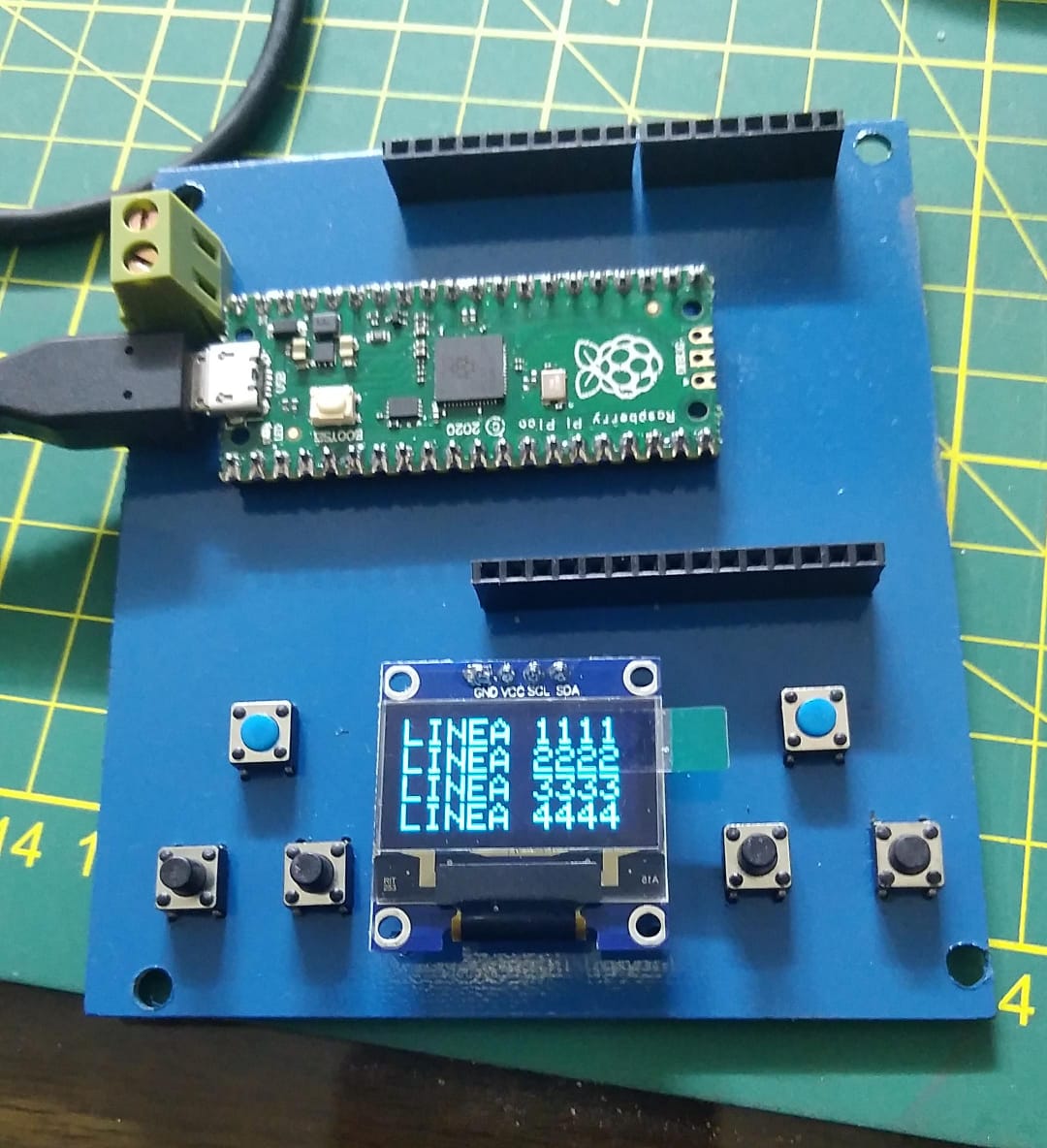
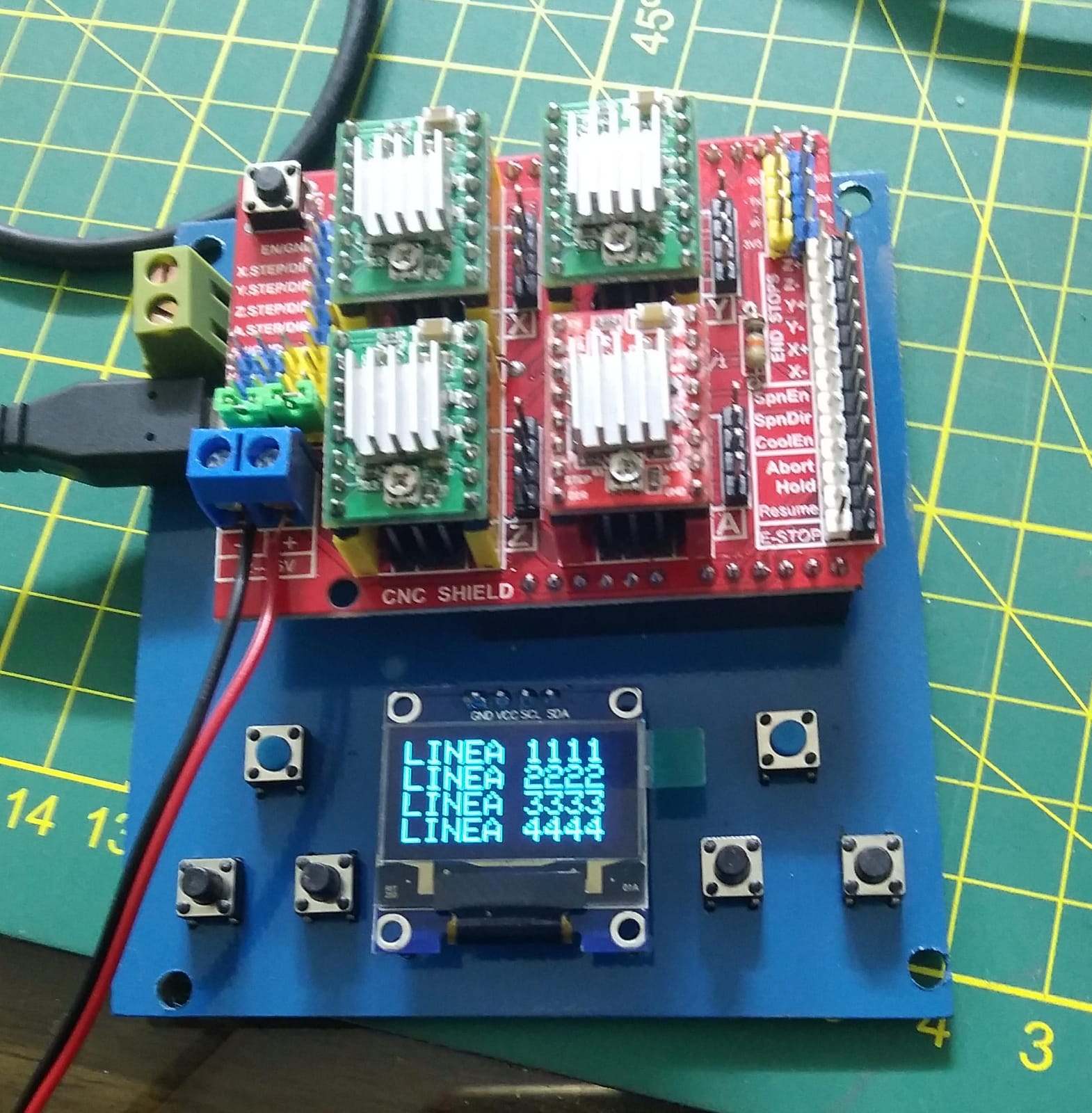
We selected electronic components: Nema 17, Raspberry Pi Pico, SSD1306 Display, A4988, FR4 Board, Dupont Cables, among others.
We also selected mechanical components such as: Threaded rods, Linear and simple bearings, Flexible couplings, Bolts, Timing belts, and Timing pulleys.
This site was created with the Nicepage