Wild Card Week: Robotics
On this week assignment we learned how to use the ur5e robot.
Universal Robots is a values-driven company, made up of a diverse team with a united approach. Our mission: Expand the boundaries of what is possible with robotics through Courage, Passion, Innovation and Integrity.
 The UR5e, produced by this company, is a lightweight, adaptable collaborative industrial robot that addresses medium-duty applications
with maximum flexibility. The UR5e is designed for seamless integration into a wide range of applications like:
The UR5e, produced by this company, is a lightweight, adaptable collaborative industrial robot that addresses medium-duty applications
with maximum flexibility. The UR5e is designed for seamless integration into a wide range of applications like:
Pick and Place: The UR5e can handle repetitive pick and place tasks efficiently.
Assembly: It can be programmed to assemble components in manufacturing processes
Material Handling: The robot can move materials between different locations within a production facility, warehouse, or distribution center.
Packaging and Palletizing: It can pack items into boxes, crates, or containers, and palletize them for shipping or storage.
Seting up
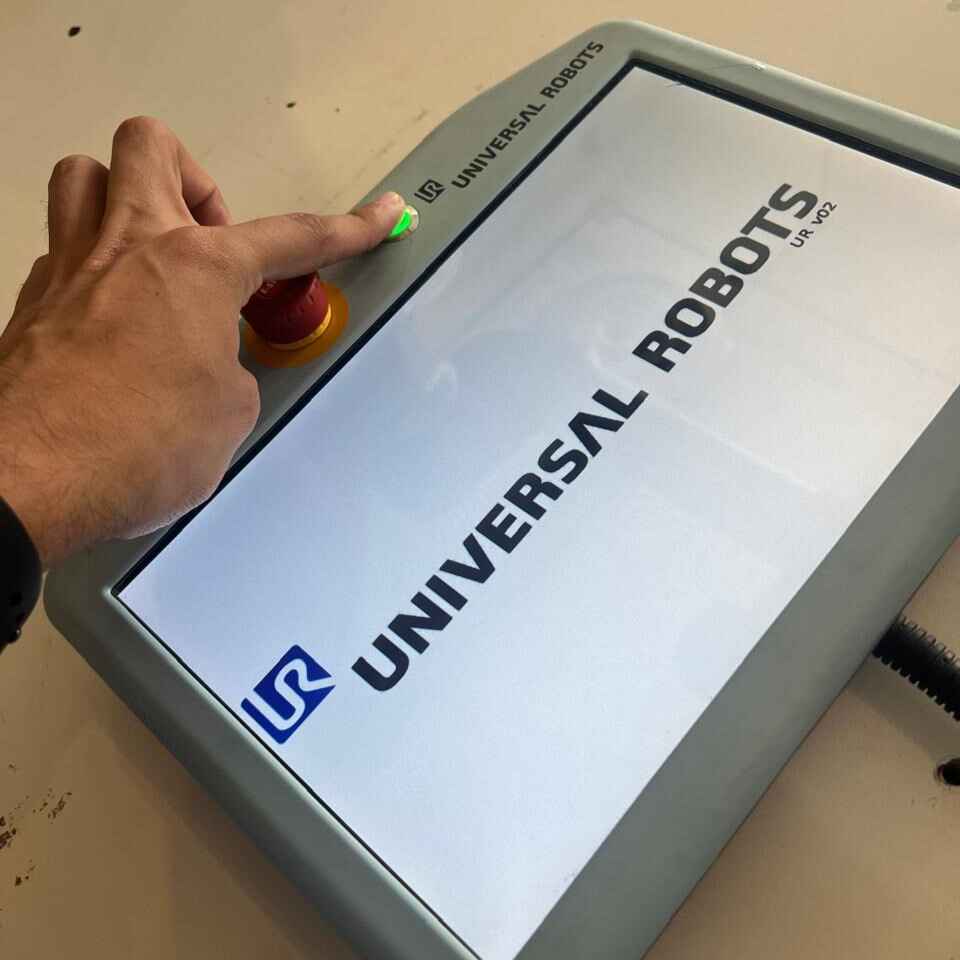
To start using the UR you have to set somethings up first. First you have to press the On/Off button on the top middle of the pad, it will take a few minutos to start working (around 15min).

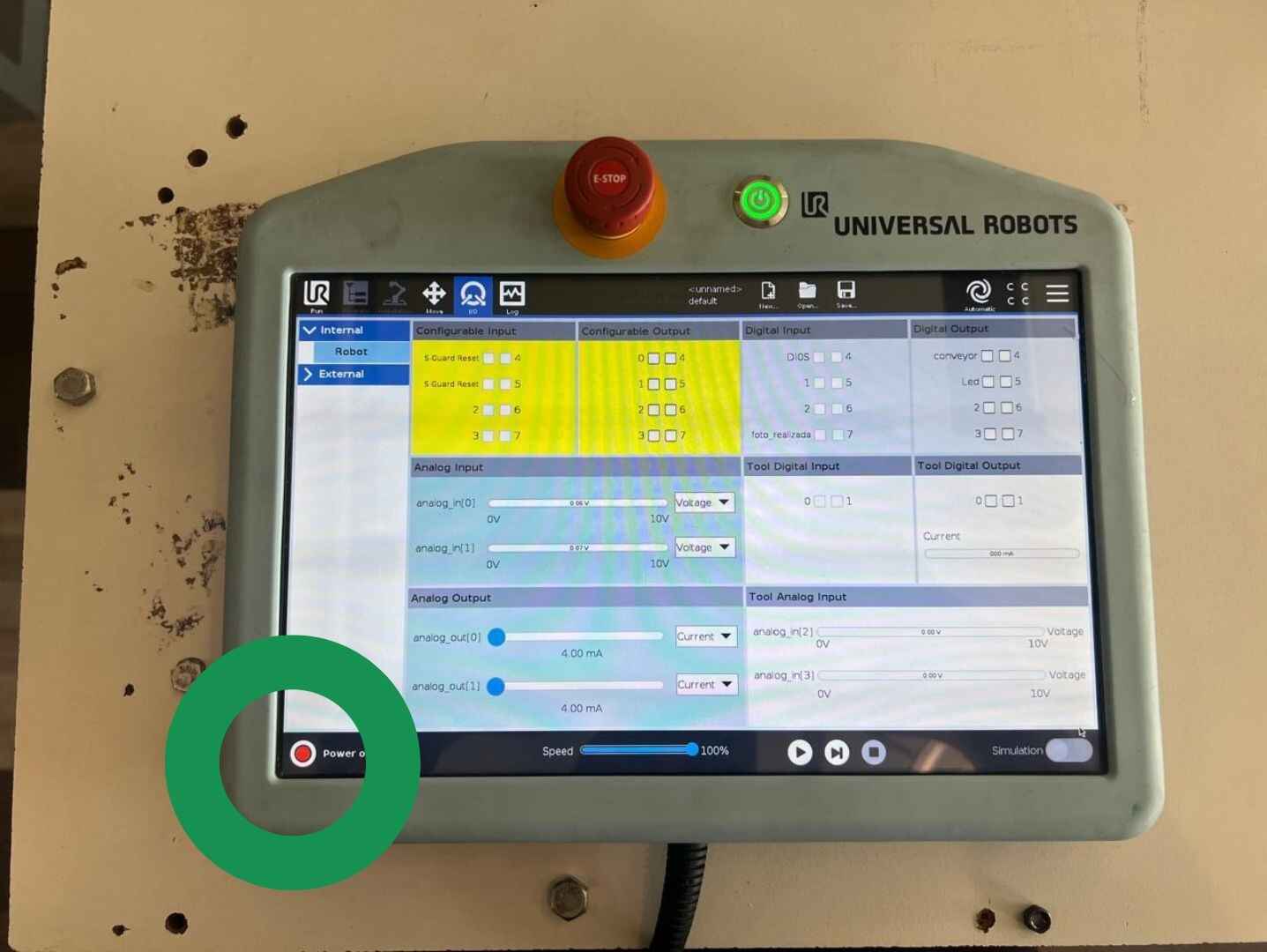
Once the software is ready, we have to activate the robot, to do we have to click on the bottom-left button and press "Start".
Programing
Now that we activate the UR it was time to program it so it can move. To do that first we have to place the robor in the position we want him to be and then save that position on the program. To move the robot we have two options: do it from the software or move it manually. I decided to move manually beacuse although it is going to be less accurate to the position I want him to be, it is easier to move.
To put the robot manually mode we have to change the configuration on the software. To do that we click on the top-right corner of the screen, and enter the password.
To move the robot manually have to press the black buttom on the top of the pad. You have to keep pressing the button in order to move the robot, that's why is suggested to use the UR with a partner. In this case Angel, Victor and I worked together to make this task.

Now that we know how to move the robot it was time to save that position. To do that we select "New program", first we have to decide what type of movement the UR is going to do between each position. It could be a lienal movement or a curve movement and finally we save the position.
Drawing
Now that we know how to move and save the position of the robot it was time to use that information to make something.

 What I did was to draw someting on a whiteboard.
We use an attachment that my local evaluatior lent to help me hold a marker.
The thing I decided to draw was an star, the reason why I choose to doodle this
is beacuse of its simplicity but also beacuse of the path you make when you draw one.
I save 5 different position with a lineal movement. I ulse make it loop so in case a line
goes wrong it could be draw again.
What I did was to draw someting on a whiteboard.
We use an attachment that my local evaluatior lent to help me hold a marker.
The thing I decided to draw was an star, the reason why I choose to doodle this
is beacuse of its simplicity but also beacuse of the path you make when you draw one.
I save 5 different position with a lineal movement. I ulse make it loop so in case a line
goes wrong it could be draw again.
I also tryed drawing a heart combining lienal and curve movements but it did not turn out well. I didt the reason why it looks bad is beacuse of the few positions saved to make the drawing.
RoboDK
Now that we know how the Ur works, we used the software RoboDK to make the drawind better.

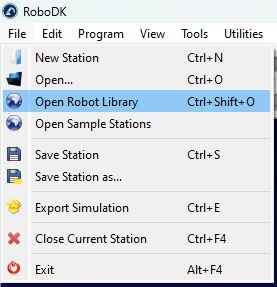
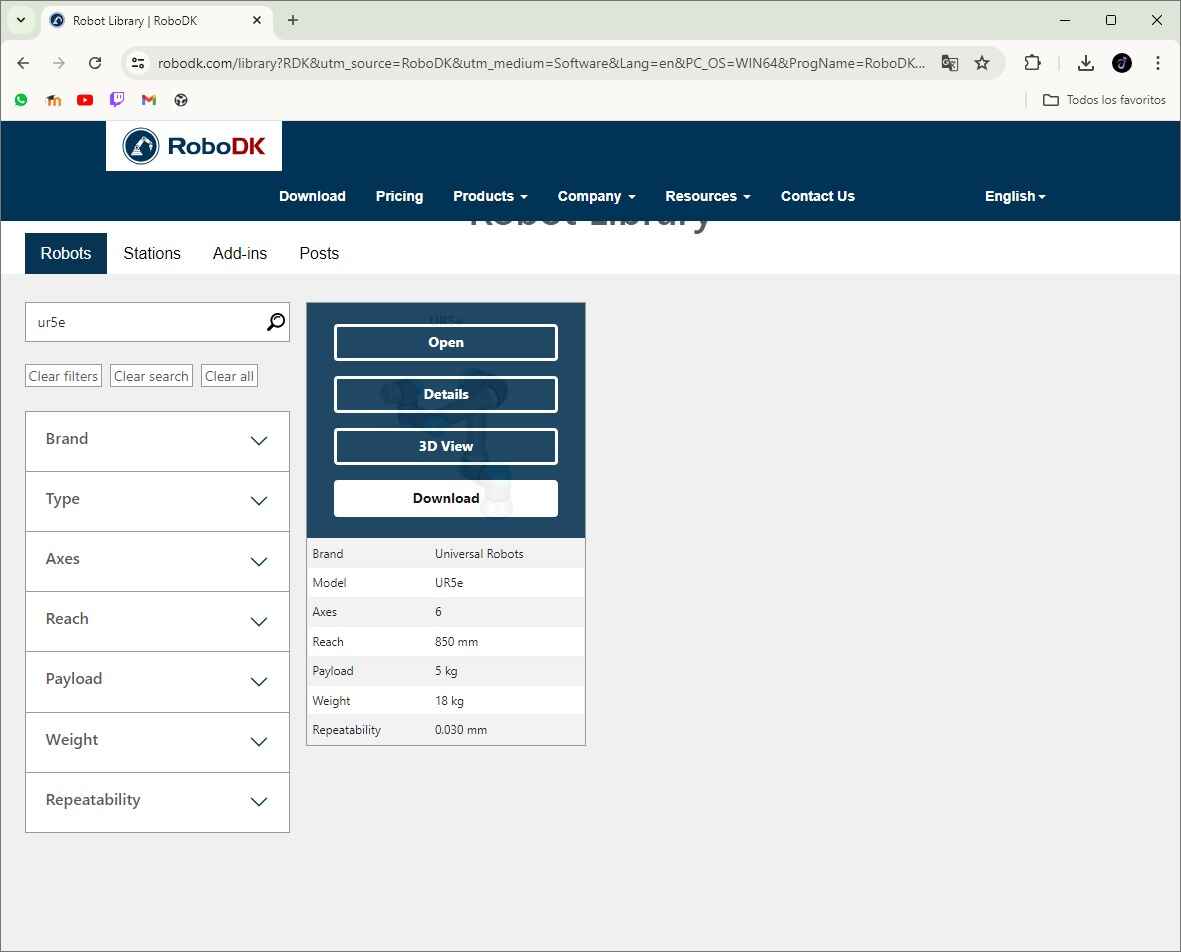
First of all we have to download the ur5e robot in the sofwtare, to this we go to File → Open Robot Library. In it you will find all the robots the software can work with, the one we use is the ur5e, we search it and download it.
How it works?
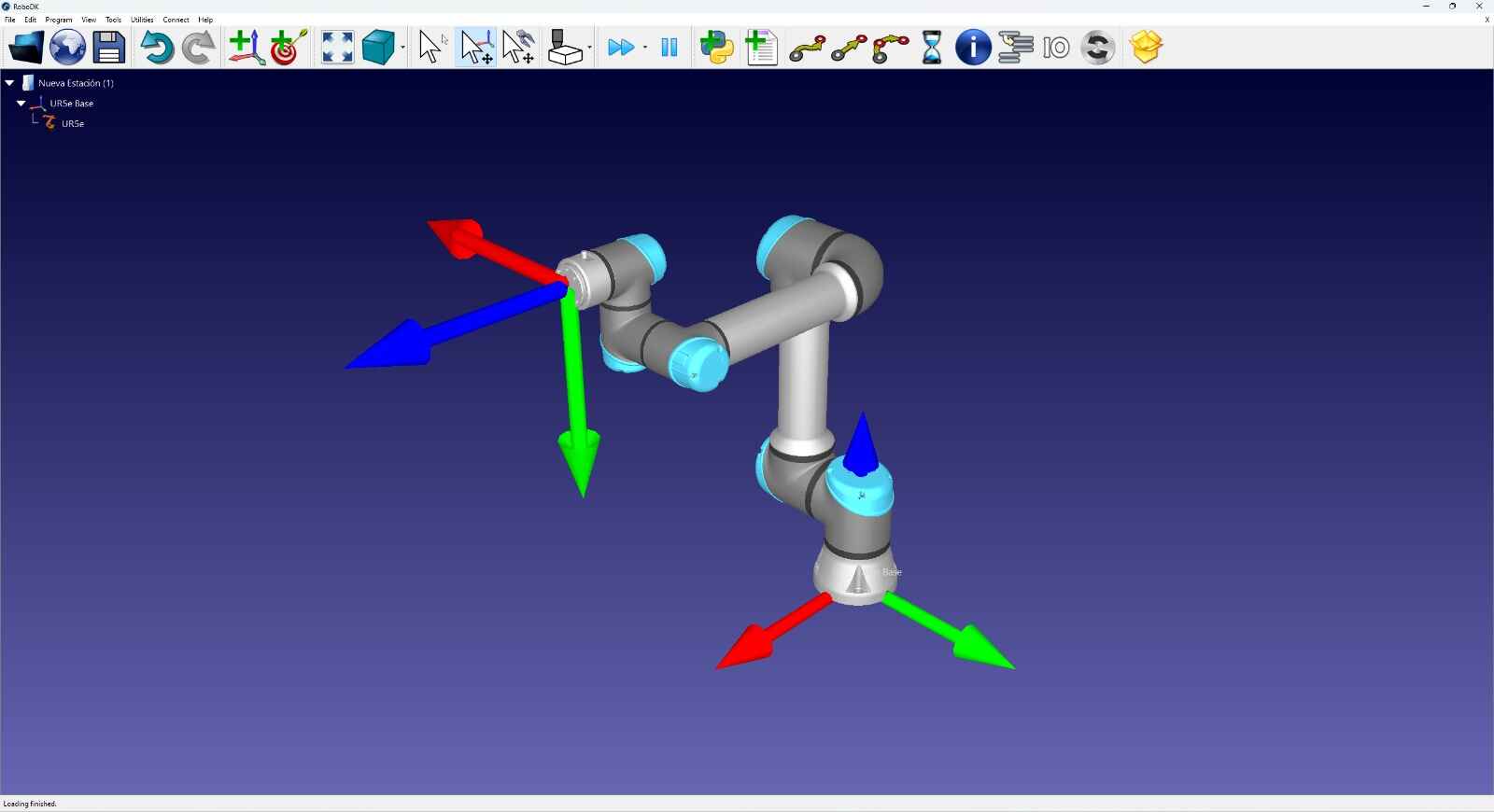
We open the downloades file in the sofwtare, he is how it will look.
We can move the robot in a lot of directions, to do this we double click on the robot and it will appear the section to move the robot.
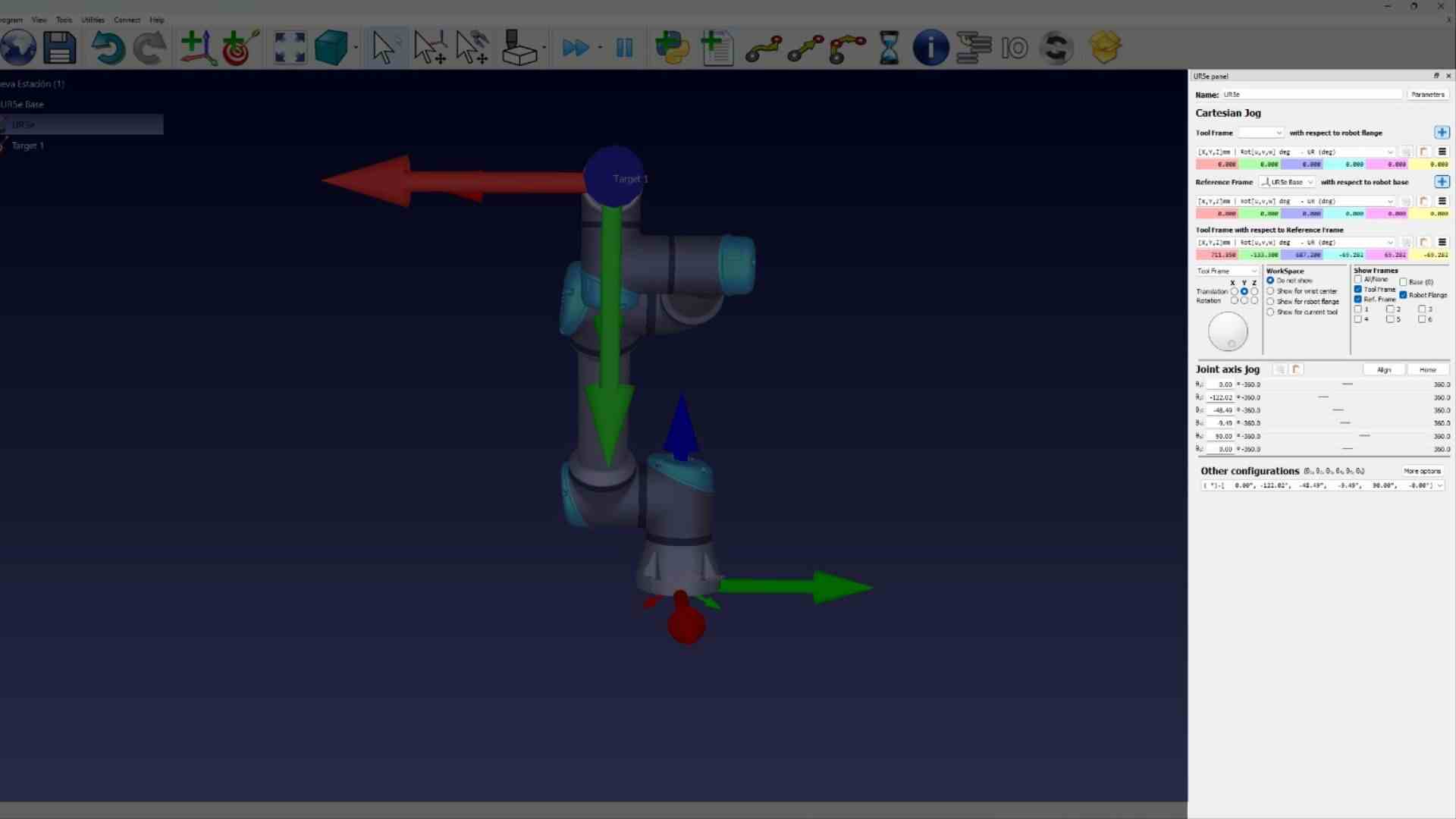
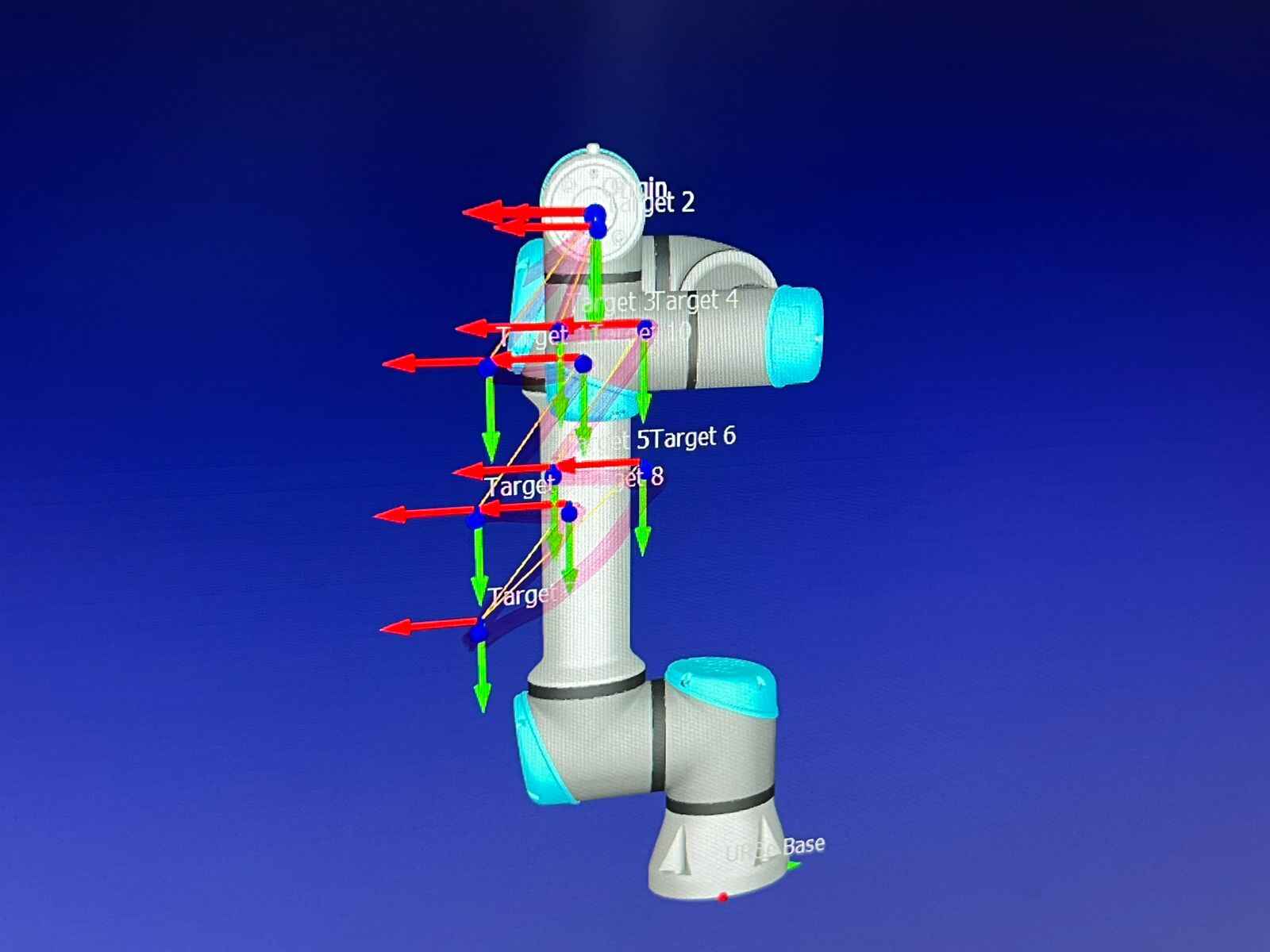
Once we set the position we save with with the target tool. We do this with all the different positions we want and once we are done, we select all the targets and make the movement by cliking on the movement tools.

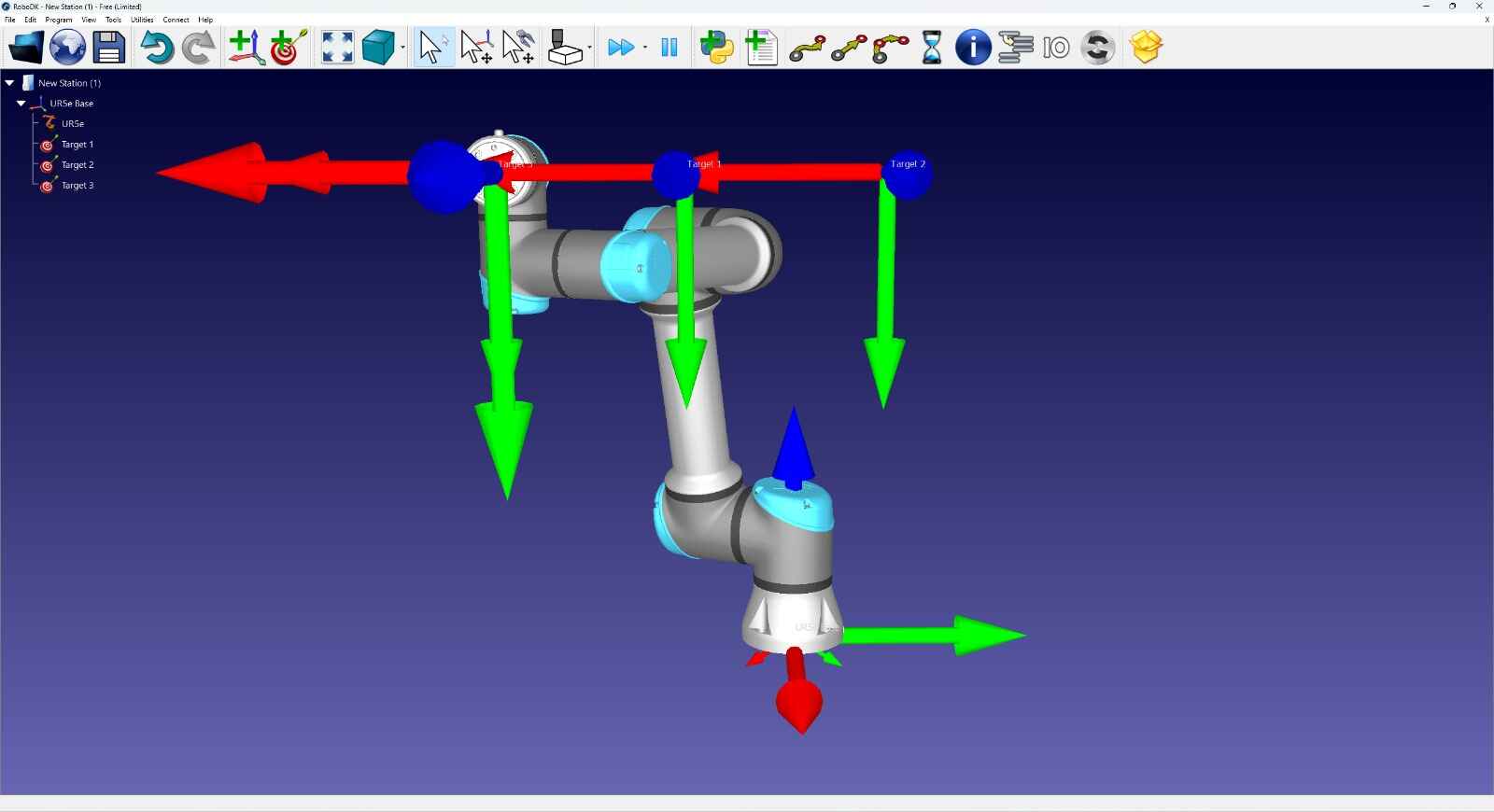
With Ctrl + R we can run the programm to see how will look like.
Result
Now that we know how the software works, I decided to make a lightning, to do this I draw with a chalkboard marker the lightning and followed the lines and saving the keypoints with the target tool.
Then I saved the .urp file and put it in the robot, this is how it looked like.