15. Wildcard Week
On this week I learned the basic things about an Universal Robot robotic arm that is at Ibero Puebla. Using this arm is very complex and it needs some classes, so, I did something simple to test the arm. My teacher taught the group that you can use the robot creating a program using the software RoboDK or settings different points manually. This second option is the one I used for this week.
Robotic Arm
Robotic arms are mechanical devices that mimic the function of human arms. They are equipped with joints that can rotate or extend along multiple axes, allowing precise and controlled movements. These devices are useful in industries such as manufacturing, where they perform tasks like assembly, painting, and welding. Their ability to operate in dangerous environments, with their efficiency and precision, makes them valuable in modern production lines.

Advances in technology have improved the capabilities of robotic arms, integrating them with sensors, artificial intelligence, and machine learning. This integration allows the robotic arms to perform complex tasks with high autonomy, adapting to changing conditions and learning from their operations. In medical fields, for example, robotic arms assist in surgeries, improving precision and reducing recovery times. As technology moves, the application of robotic arms continues developing, promising greater influences on various industries.

- Shoulder: This is the part of the robotic arm attached to the base, allowing the arm to rotate.
- Elbow: This joint connects two segments of the arm.
- Wrist: This joint provides rotational movement to the end of the arm, allowing the tool to orient itself.
- End-effector: Attached at the end of the robotic arm, this component is designed to interact with the environment and it depends on the task the robotic arm does.
Universal Robots
Universal Robots produces a line of friendly, flexible, and safe robotic arms known for their affordability and ease of integration into industrial processes. These robots are designed to work with human operators, improving productivity without compromising safety. Their applications are various, traveling from assembly and packing to more difficult tasks like machine cleaning and screw driving, making them a versatile tool.
Marking an impact in the robotics industry, Universal Robots has continuously advanced the abilities of robots with intuitive interfaces, light designs, and precise control. Each robotic arm is equipped with advanced sensors and safety features that allow it to feel its environment and stop operations if a human comes too close. This approach not only guarantees worker safety but also reduces the need for safety barriers, which separate humans from machines.
RoboDK
RoboDK is a simulation software designed for the programming of industrial robots. The software offers a friendly environment for robotic planning and testing. It supports a big range of robots, making it versatile for various applications like welding, painting, and moving objects tasks. RoboDK allows users to create, simulate, and optimize robotic paths and programs and translate them into specific codes.
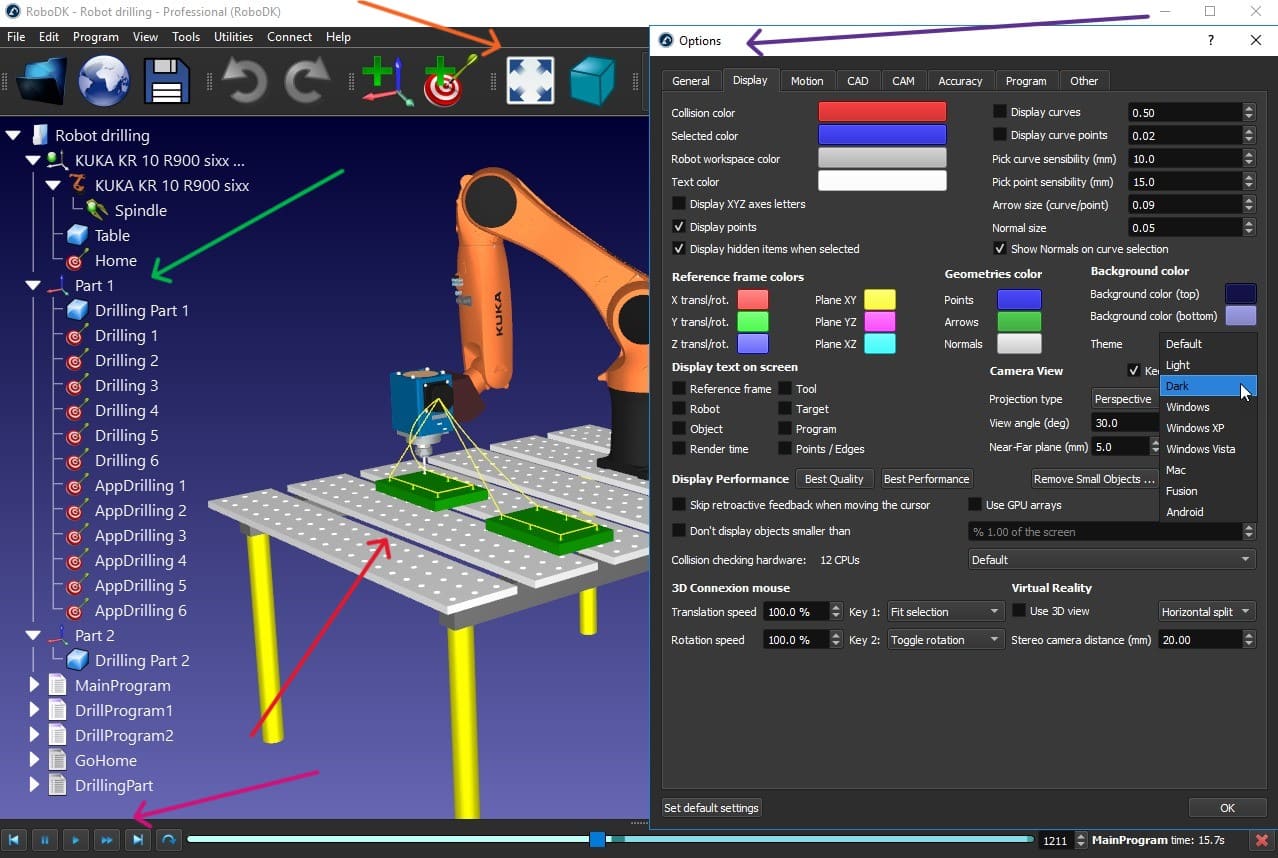
- Workspace: Marked with a red arrow, is where the 3D models of robots and environments are manipulated.
- Tree View: Pointed with a green arrow, it is a list that organizes and shows all the elements of the simulation.
- Toolbar: Marked with an orange arrow, it contains icons for quick access to the most common functions.
- Properties Panel: Marked with a purple arrow, it shows and allows modifications to the properties of the selected object.
- Simulation Bar: Pointed with a pink arrow, it features play, pause, and stop controls, and adjusts the speed of the simulation for analysis.
Drawing
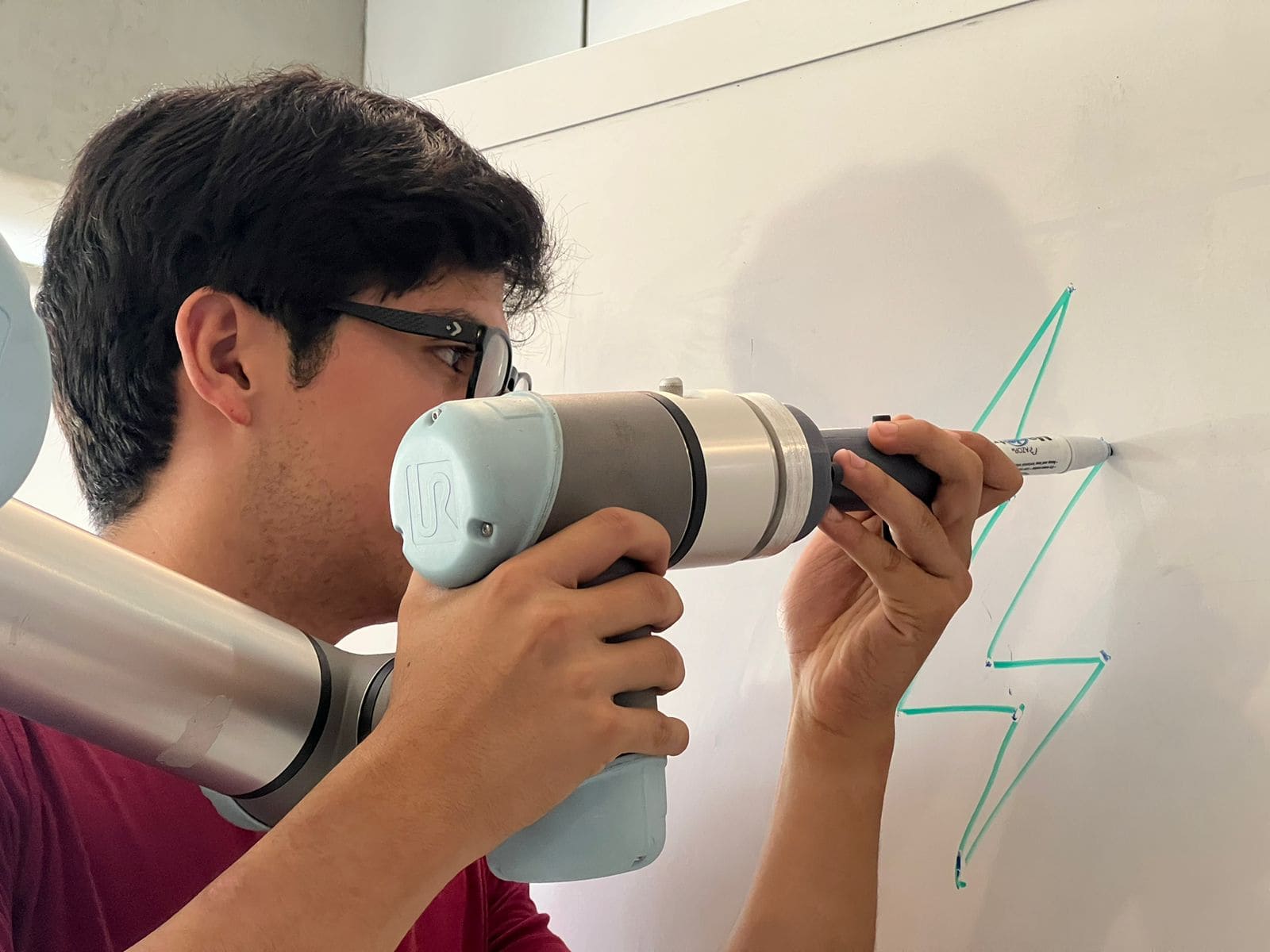
For this week, I used the UR panel to set different points on a whiteboard in order to paint something there. Before I show the tests and the final drawing, I wanted to show hoy to create points for the UR. You can watch this process on the following video:
Now that we know how to make points, I draw a lightning on the whiteboard to mark the vertices and then recreate this drawing.
Finally, the video of the UR recreating my drawing autonatically:
To download the files used for this week, you can click here.
Using RoboDK
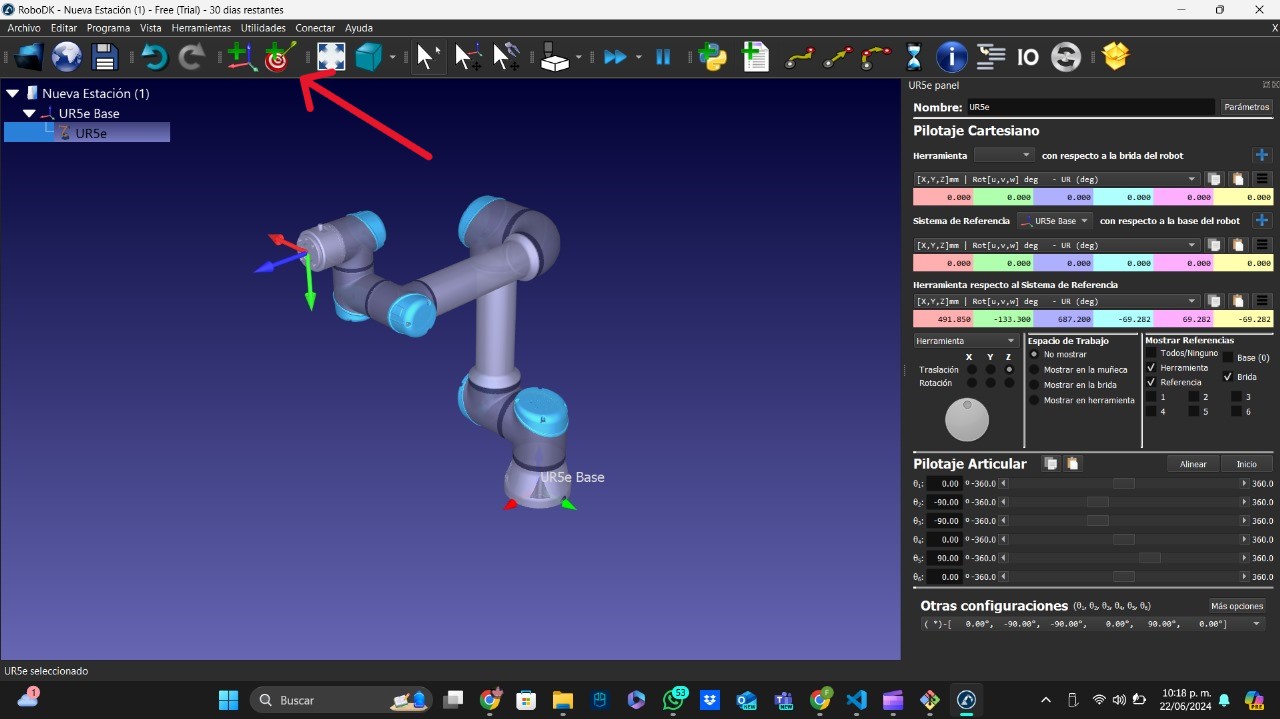
For the task, we use RoboDK setting points in the space and adding the movements point by point. Here is a quick tutotial:
First, after opening the software, you should add the robotic arm. You can add it using internet or downloading your arm's model on the RoboDK library (red arrows).
Then, you should right click the arm to open its options. The options are useful to move the arm using its axles. When you move the arm to another point, you can save that point using the target button (marked with an arrow).
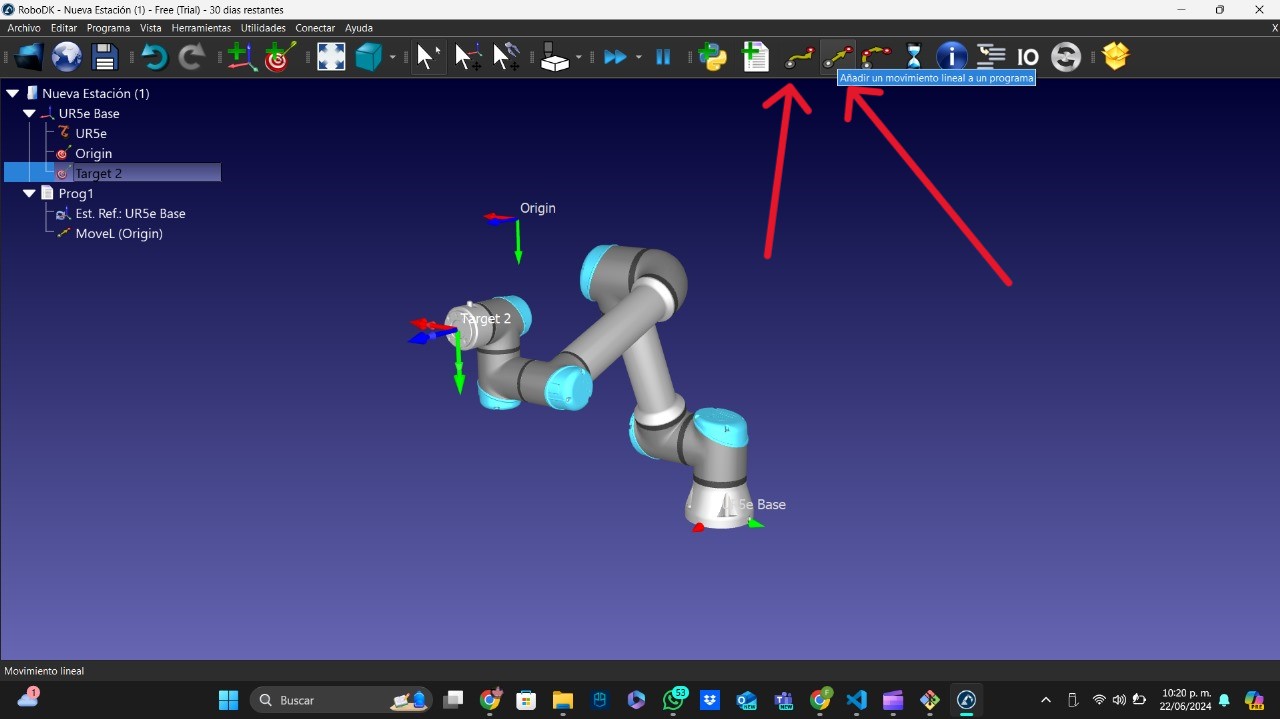
For adding movement and a trajectory to the arm, you shoul select the target and while it is selected, you should click on the movement button (marked with arrows)
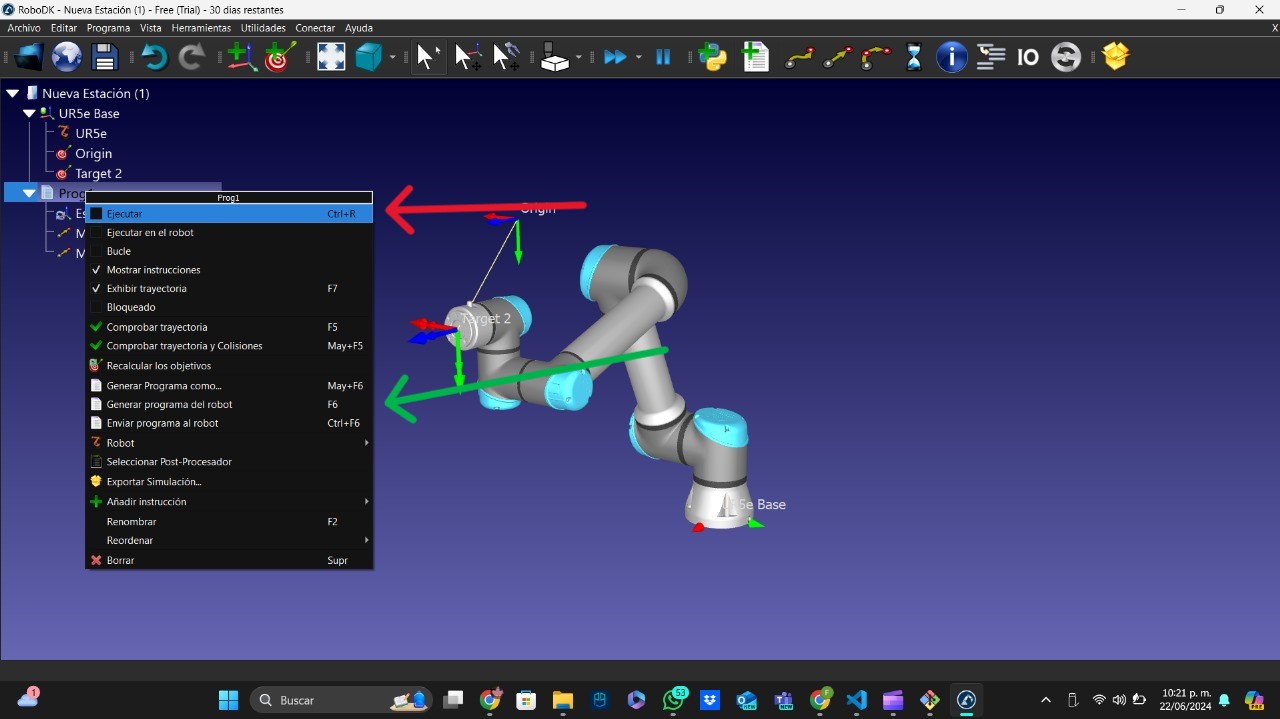
Finally, by right clicking the program created, you can reproduce it (red arrow) or save it (green arrow). Once you save the program, you can copy it to the arm's software.
Here is a video of the lightning done using RoboDK:
To download the files used for this week, you can click here.