This week’s group assignment was made in the same time as output devices week. We cover how to make sense of the signals coming from an input device, using the oscilloscope and logic analyzer.
Designing a Thermistor Board
For the input devices week I decided to try out to use a thermistor. A thermistor utilizes resistance to measure temperature. Every thermistor has a specific internal resistance, which can be measured using a voltage divider circuit, and then converted to temperature using an equation.
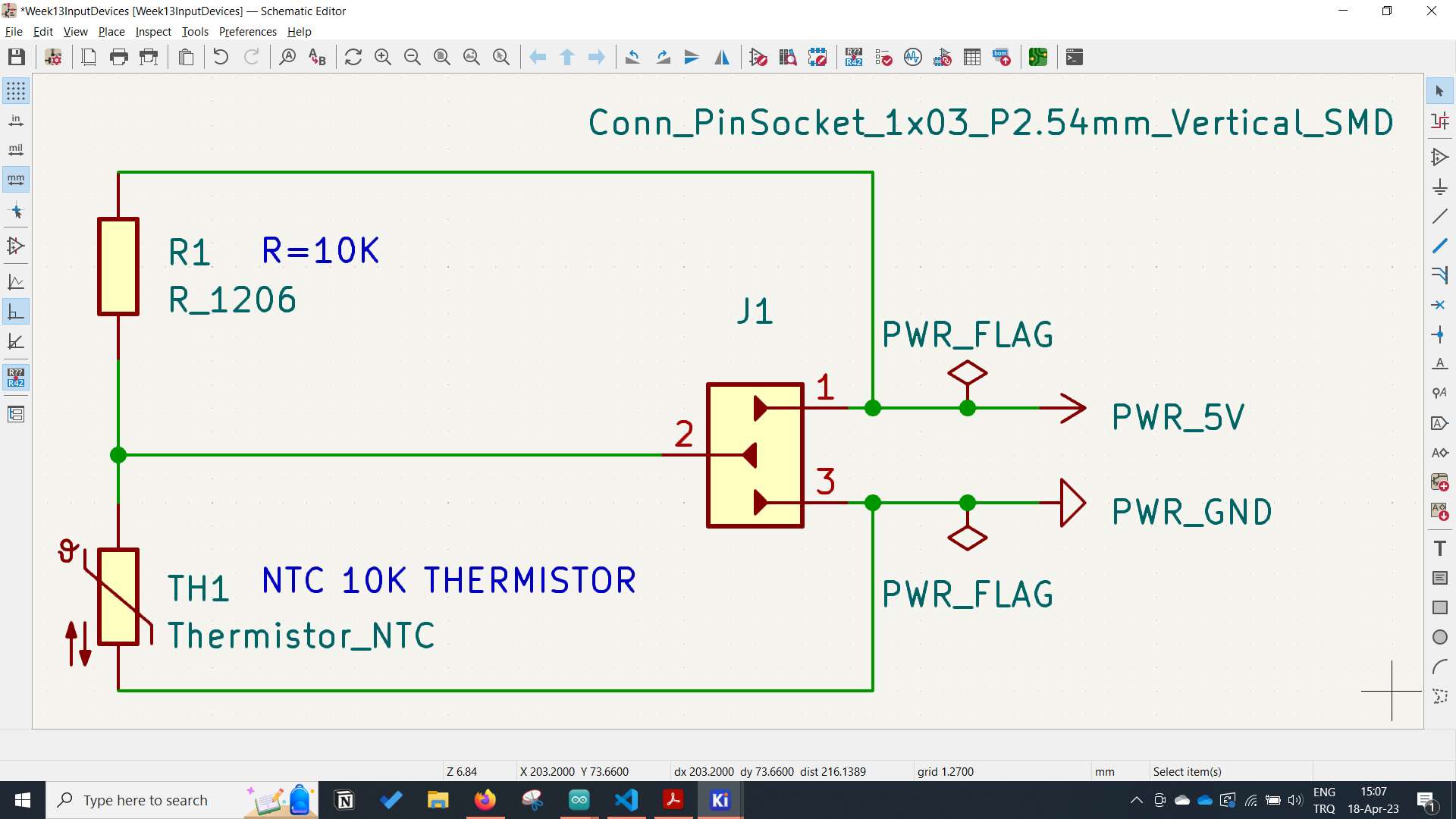
By following the tutorial here, I designed a circuit board for the thermistor setup. Since my thermistor was 10K, I used a 10K reference resistor.
Milling & Assembling
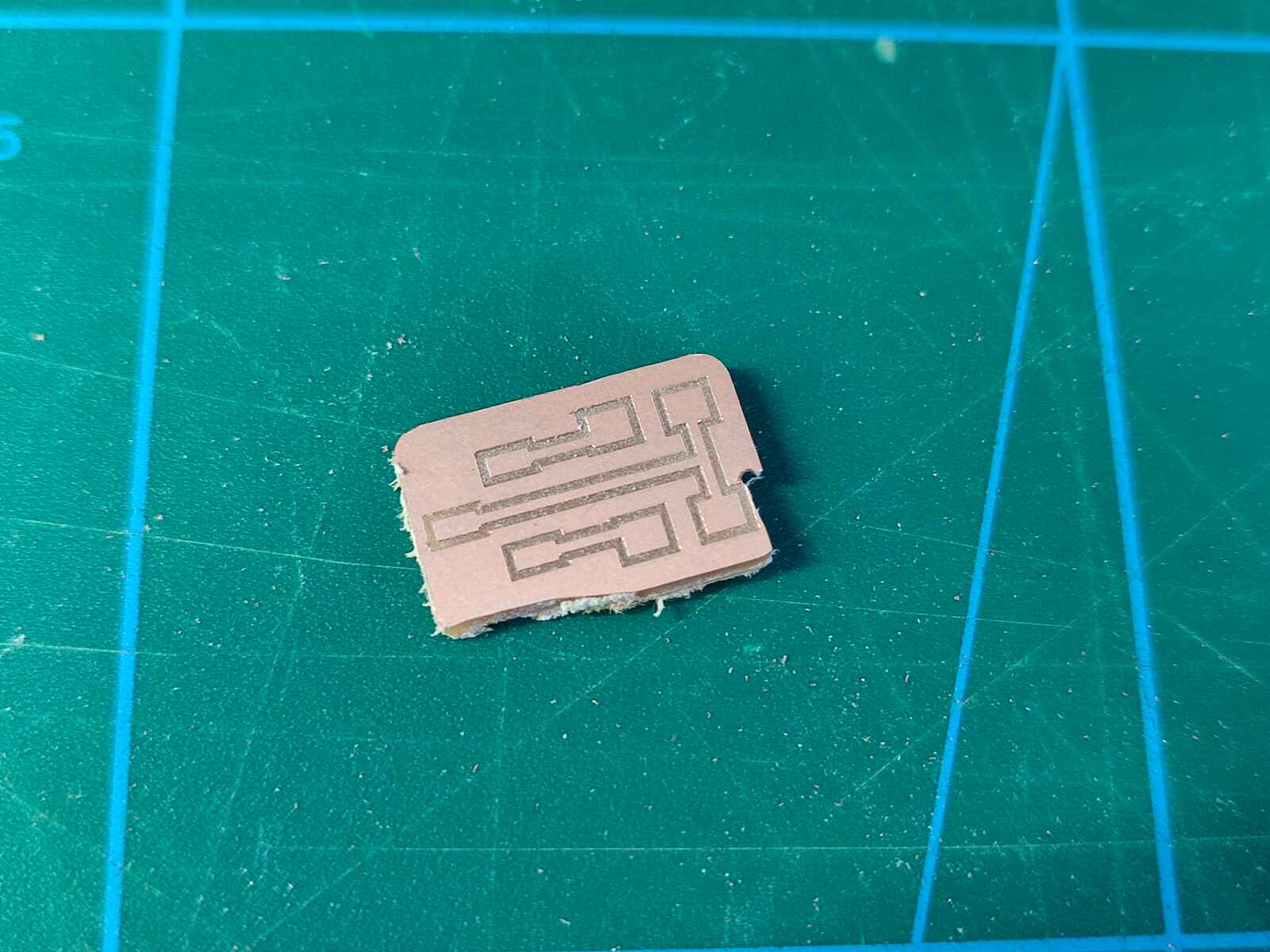
I moved on to milling the board. In my first try, the board broke at the contouring stage of the milling.
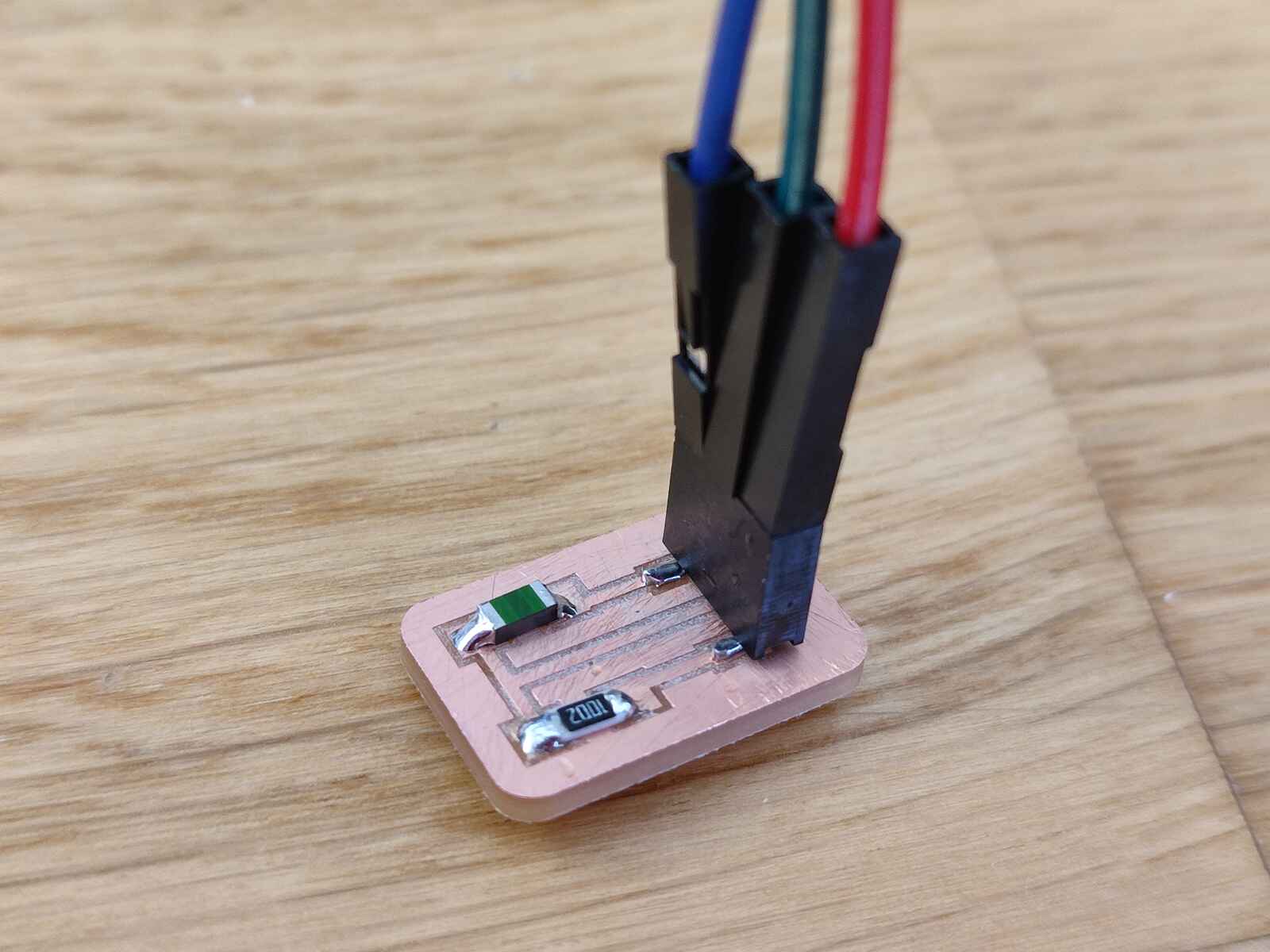
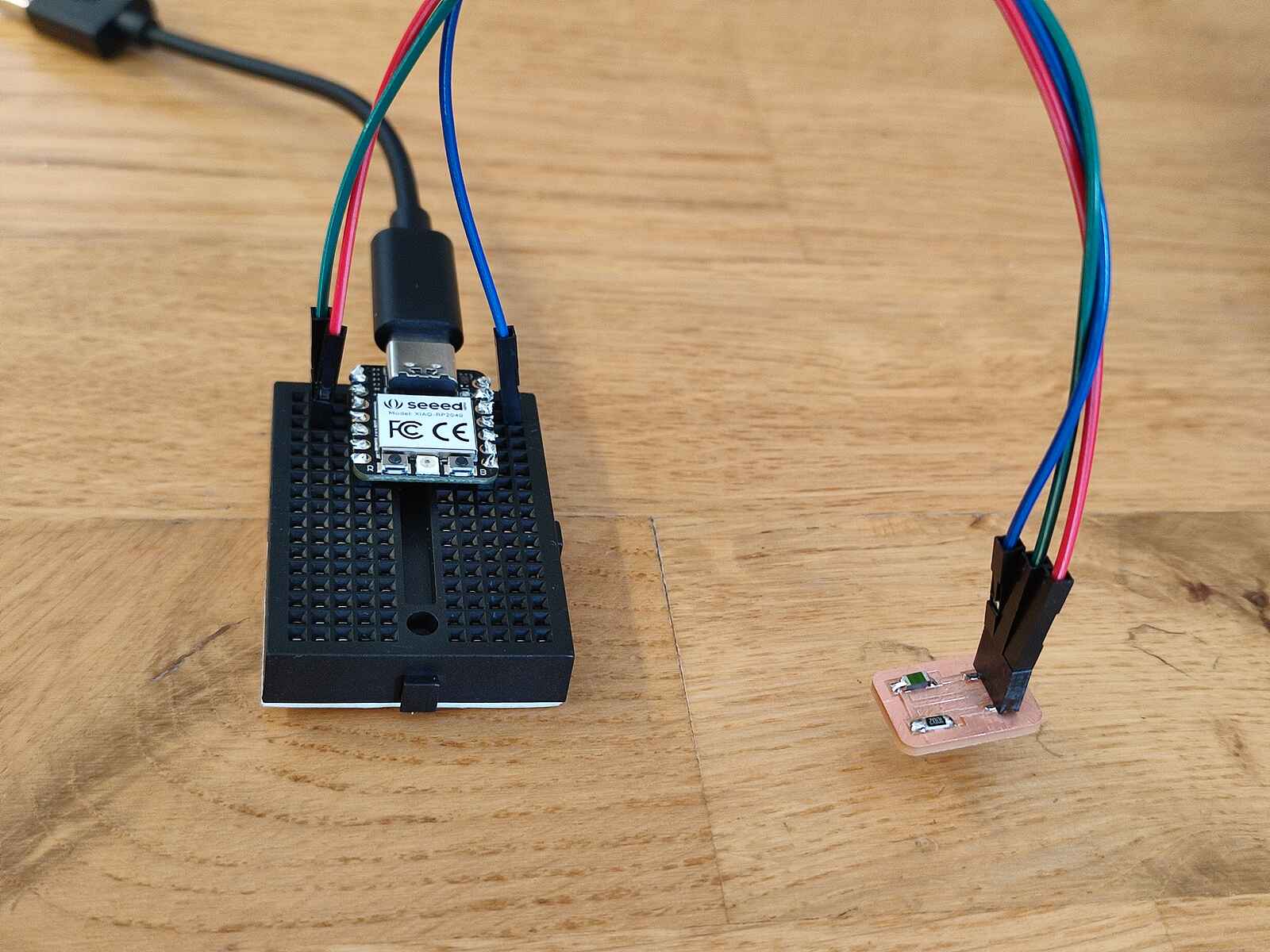
I figured that this was because the board was much smaller than the ones I did before, and it flew away when cutting the last layer. To solve this, I reduced the speed of the cutting tool to 50% at the last stage. After this, I did the soldering and connected it to the XIAO.
Thermistor Code
I followed the code in the tutorial and adapted the defined values to the specific thermistor that I was using. Using this code, I was able to read the resistance in the thermistor and convert it into a temperature value.
/*!
* @file Arduino_NTC_Interface.ino
* @brief Interfacing NTC Thermistor With Arduino
* @author Jobit Joseph
* @copyright Copyright (c) 2022 Semicon Media Pvt Ltd (https://circuitdigest.com)
*/#define ntc_pin A0 // Pin,to which the voltage divider is connected
#define vd_power_pin D2 // 5V for the voltage divider
#define nominal_resistance 10000//Nominal resistance at 25⁰C
#define nominal_temeprature 25// temperature for nominal resistance (almost always 25⁰ C)
#define samplingrate 5// Number of samples
#define beta 3750// The beta coefficient or the B value of the thermistor (usually 3000-4000) check the datasheet for the accurate value.
#define Rref 10000//Value of resistor used for the voltage divider
int samples = 0; //array to store the samples
void setup(void) {
pinMode(vd_power_pin, OUTPUT);
Serial.begin(19200);
}
void loop(void) {
uint8_t i;
float average;
samples = 0; // take voltage readings from the voltage divider
digitalWrite(vd_power_pin, HIGH);
for (i = 0; i < samplingrate; i++) {
samples +=analogRead(ntc_pin);
delay(10);
}
digitalWrite(vd_power_pin, LOW);
average = 0;
average = samples / samplingrate;
Serial.println("\n \n");
Serial.print("ADC readings ");
Serial.println(average);
// Calculate NTC resistance
average = 1023/ average -1;
average = Rref / average;
Serial.print("Thermistor resistance ");
Serial.println(average);
float temperature;
temperature = average / nominal_resistance; // (R/Ro)
temperature = log(temperature); // ln(R/Ro)
temperature /= beta; // 1/B * ln(R/Ro)
temperature +=1.0/ (nominal_temeprature +273.15); // + (1/To)
temperature = 1.0/ temperature; // Invert
temperature -=273.15; // convert absolute temp to C
Serial.print("Temperature ");
Serial.print(temperature);
Serial.println(" *C");
delay(2000);
}
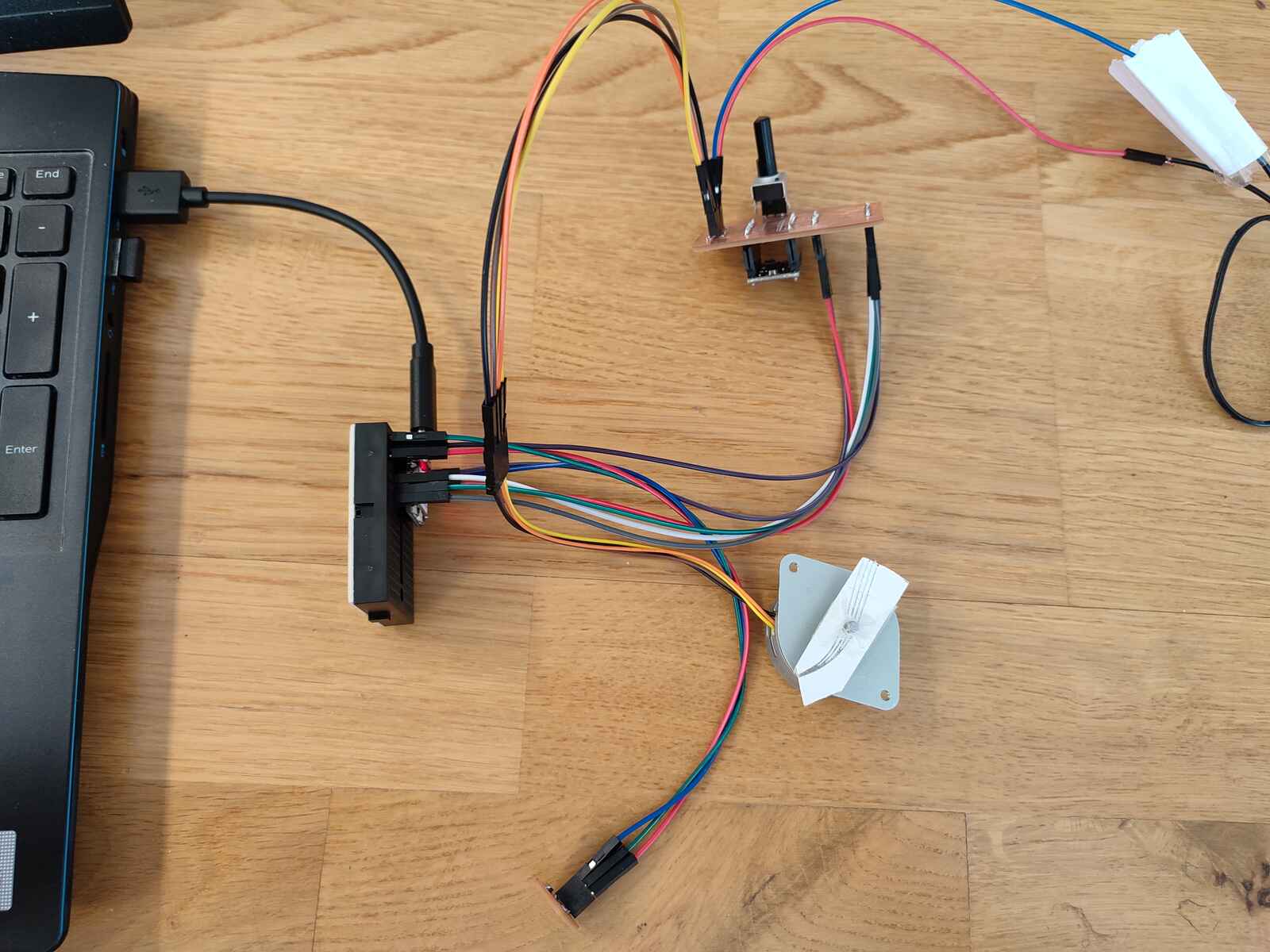
Controlling Stepper Motor with Thermistor
I wanted to combine what I learned in the output devices week with the input devices week. So, I utilized the temperature reading from the thermistor to control the speed of a stepper motor. I combined the code above with one of the codes I used in the output week.
After the temperature is read, the “ADC Readings” value is mapped to the interval value of the stepper. Therefore, when the temperature becomes higher, the interval between steps decrease- resulting in the motor turning faster.
I also learned to use a constrain function to limit the mininum and maximum number the interval could take, to avoid putting too much pressure on the stepper accidentally.