
Applications and Implications
WEEK 16
CONTENTS
The objective of this week is to describe and introduce my final project, Find a plan to execute it
Applications and Implications of My BOT
What will it do?
- The main objective is to make a robot that roams around the lab and carries our things
- In our lab, it is a bit hard to carry things from one place to another if there are big sheets of materials or equipment
- i can automate the movements from one point to another, the bot cam move from one place to another lifting and carrying things
Who's done what beforehand?
- there are some AGV “automatic ground vehicles currently on the market used in assembly lines and warehouses, but those are very expensive and mostly made for industry uses


- Some of the projects that have been done before can be found on the following links:
Bomb squad assistance robot
http://fabacademy.org/2020/labs/vigyanashram/students/shreyas-shah/assignments/project.html
http://fabacademy.org/2018/labs/fablabberytech/students/wael-khalil/index.html
this is not exactly the same one but the movement that I am going to use will be similar, this is what i got from the previous fab Academy documentation
- in addition to that, there are many companies which sell industry level bots
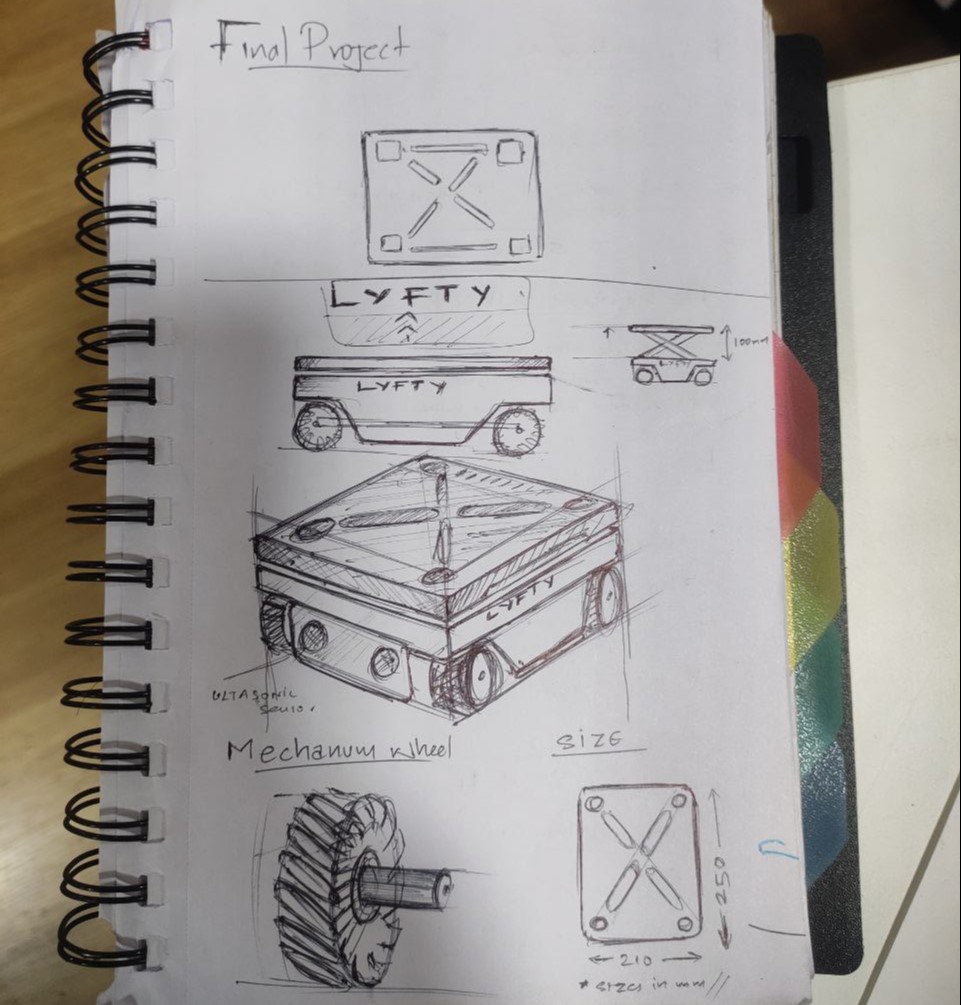
What will I design?
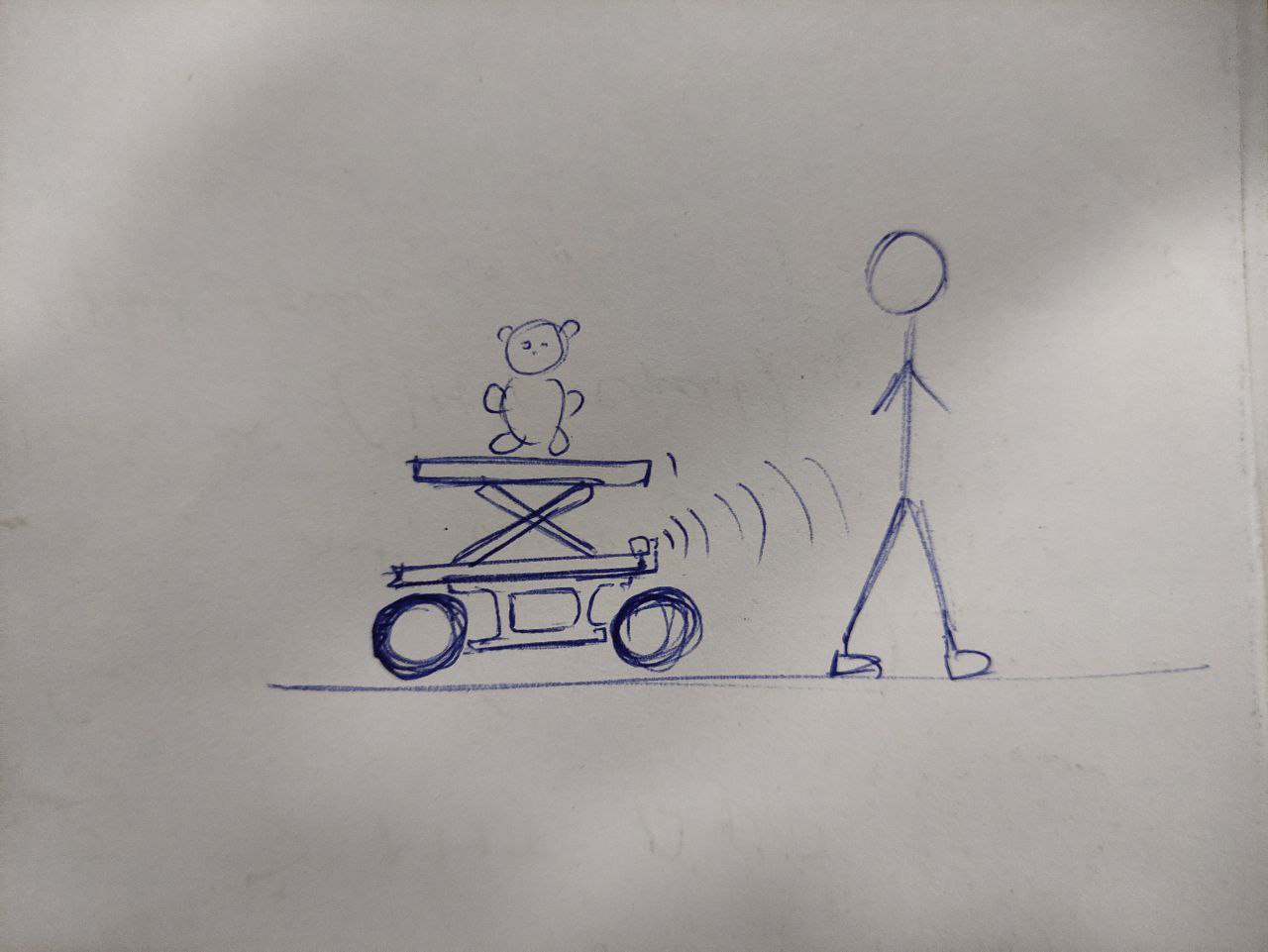
- this is the concept sketch
- it will have a lifting mechanism to lift and carry things
- an ultrasonic sensor to avoid collision, and edge detection
- a light for vision
this model is just a proof of concept, in future, i will be making a full-scale one which can actually carry some loads
- these are some of the sketches that is made, with those ideas in mind

What materials and components will be used?
- the chassis will we water jet cut out of aluminum or an ms sheet, or acrylic laser cut
- use acrylic sheets and 3D printing for the frame
- and all the mechanical components and joints will be 3D printed
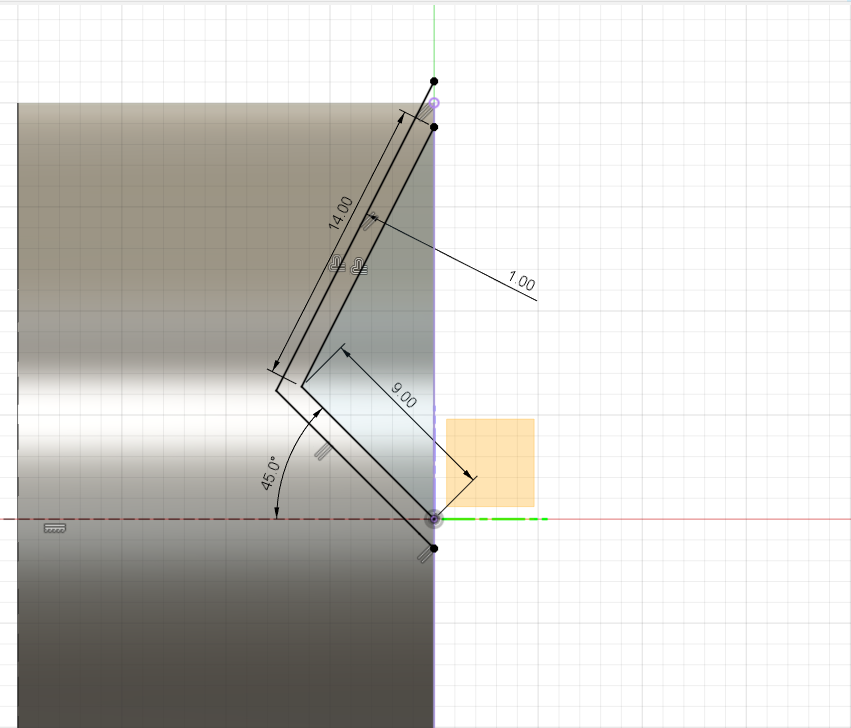
- for lifting mechanism, i will be using a threaded rod and 6mm acrylic sheet to make a scissor lift.
BOM - full project
| Components & Parts | Units | Source | Price |
|---|---|---|---|
| ESP-WROOM_32D | 1 | Fab Inventory | 0 |
| Ultra sonic | 2 | Fab Inventory | 0 |
| limit switch | 2 | Fab Inventory | 0 |
| nuts and bolts | — | Fab Inventory | 0 |
| 6mm acrylic sheet | leftovers | Fab Inventory | 0 |
| 4mm acrylic sheet | leftovers | Fab Inventory | 0 |
| cardboard 6mm | leftovers | Fab Inventory | 0 |
| threaded rod | leftovers | Fab Inventory | 0 |
| ribbon cables | 7 | Fab Inventory | 0 |
| Dc motor 60 rpm | 4 | Local shop | Rs: 520 |
| Dc motor 150 rpm | 1 | Local shop | Rs: 140 |
| Lithium Ion battery | 1 | Fab Inventory | 0 |
| PCB | 1 | Fab Inventory | 0 |
| steel cycle spokes | 6 | Local shop | Rs: 60 |
| heat shrink tube | 2 | Fab Inventory | 0 |
| Motor mounts | 5 | Local shop | Rs: 100 |
| PS3 controller | 1 | Fab lab | 0 |
| Total: | Rs: 820 |
electronic components will be shared in the final project page
Where will it come from?
- According to the list of components I will be using for my robot, almost all Electronic Components are available in the lab only a few components are needed to be bought from local suppliers
- The PCB control board will be designed and fabricated in the Fab Lab.
- Considering the Mechanical Parts of my robot, all parts will be designed and constructed in the Fab Lab. Most parts are expected to be 3d printed such as the Wheels and the Frame. Some parts will be laser cut like panels
- and for the decals, i will be using the vinyl cutter
- for cutting the chassis from a metal sheet I will be using the water jet cutter
the sourcing of the components is given in the above BOM
What parts and systems will be made?
- all parts will be made in the lab, except for the standard electronic modules.
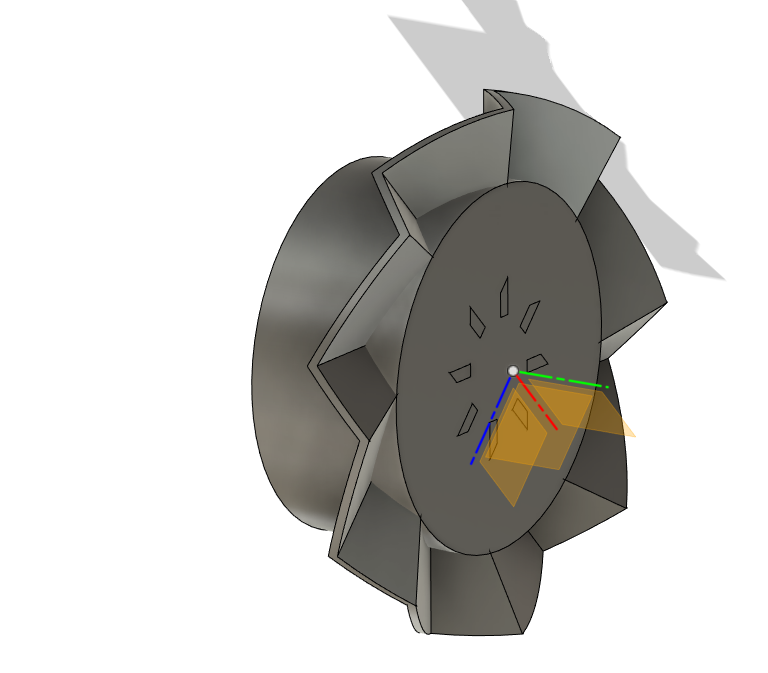
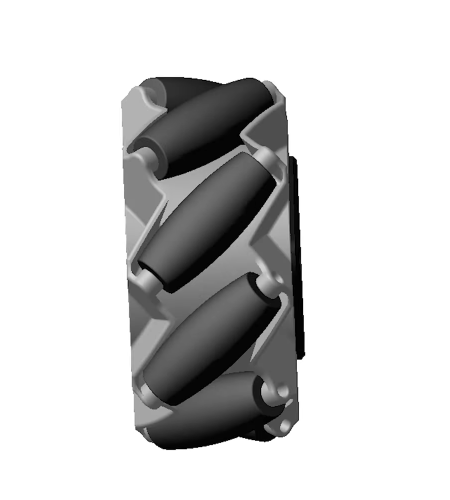
- the mecanum wheel that is going to be used will be completed designed from the scratch
What is the Schedule
- scribbled down the plan of how the project is to be executed
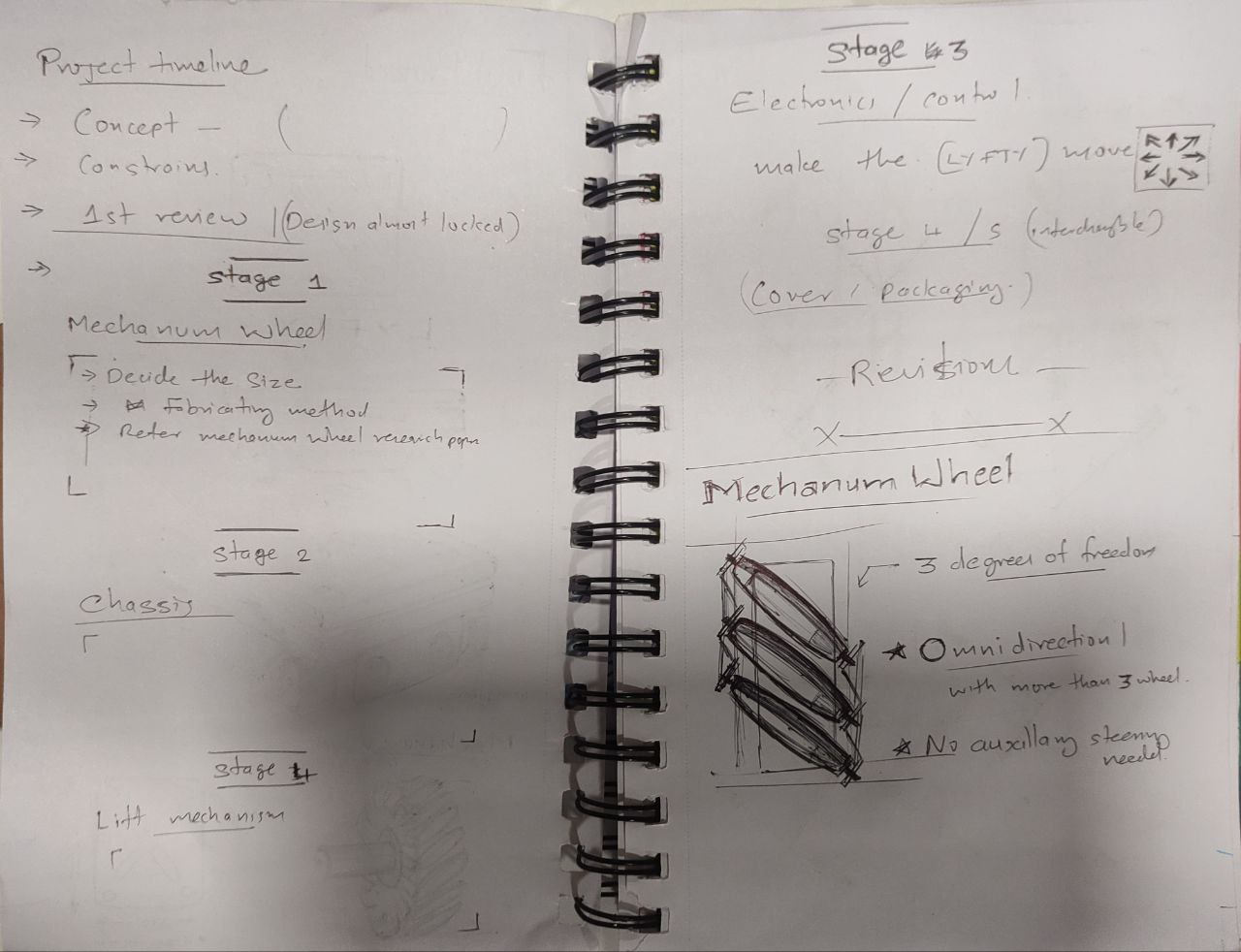
then i refined those plan into 6 different phases, these phases were planned according to the complexity of the tasks and also to constantly check the progress of the project
Project planning
This whole project is divided into 4 Phases
Phase 1
- designing the mecanum wheel, fabrication it ,
- mecanum wheel was placed first as it was the most integral part of the project.
the rest of the things will be based on that, after fixing the whole dimension of the bot
Phase 2
- fixing the size of the bot by noting the sizes of raw material and the components to be used
- CAD design of other components
- make BOM for this project
Phase 3
- chassis, fabrication, and assembly of motors and components
Phase 4
- Electronics, designing the PCB, fabrication.
- integration of electronics to the chassis,
- run test runs with the chassis
Phase 5
- fabrication of the frame, assembly. as the chase will be just mounted on the chassis
- fabricating and assembly of the top and the lifting mechanism
Phase 6
- programming,
- testing
- debugging
What questions need to be answered?
- programming is the only challenge for, as i have less experience in programing with Arduino,
- communication between the controller and the bot has to be figured out
- automation of the bot, might have to use open CV object identification for identifying whom to follow, but this is for the second version, so not much worry about that now
How will it be evaluated?
- If the bot can perform at least 80% of the features that were mentioned, we can ensure that this project is successful.
- which are:
- if the bot's mecanum wheels are capable of executing distinct movements.
- proper working of the lifting mechanism.
- The bot responds to the controller's directions by moving accordingly.
- complete fabrication of all the required components