It's time to make the PCB.
My PCB will control the whole robot, the main part is 12 Servo Motors, and 2 LEDs for the eyes, and a HC-05 Bluetooth Module to control the robot via Mobile App.
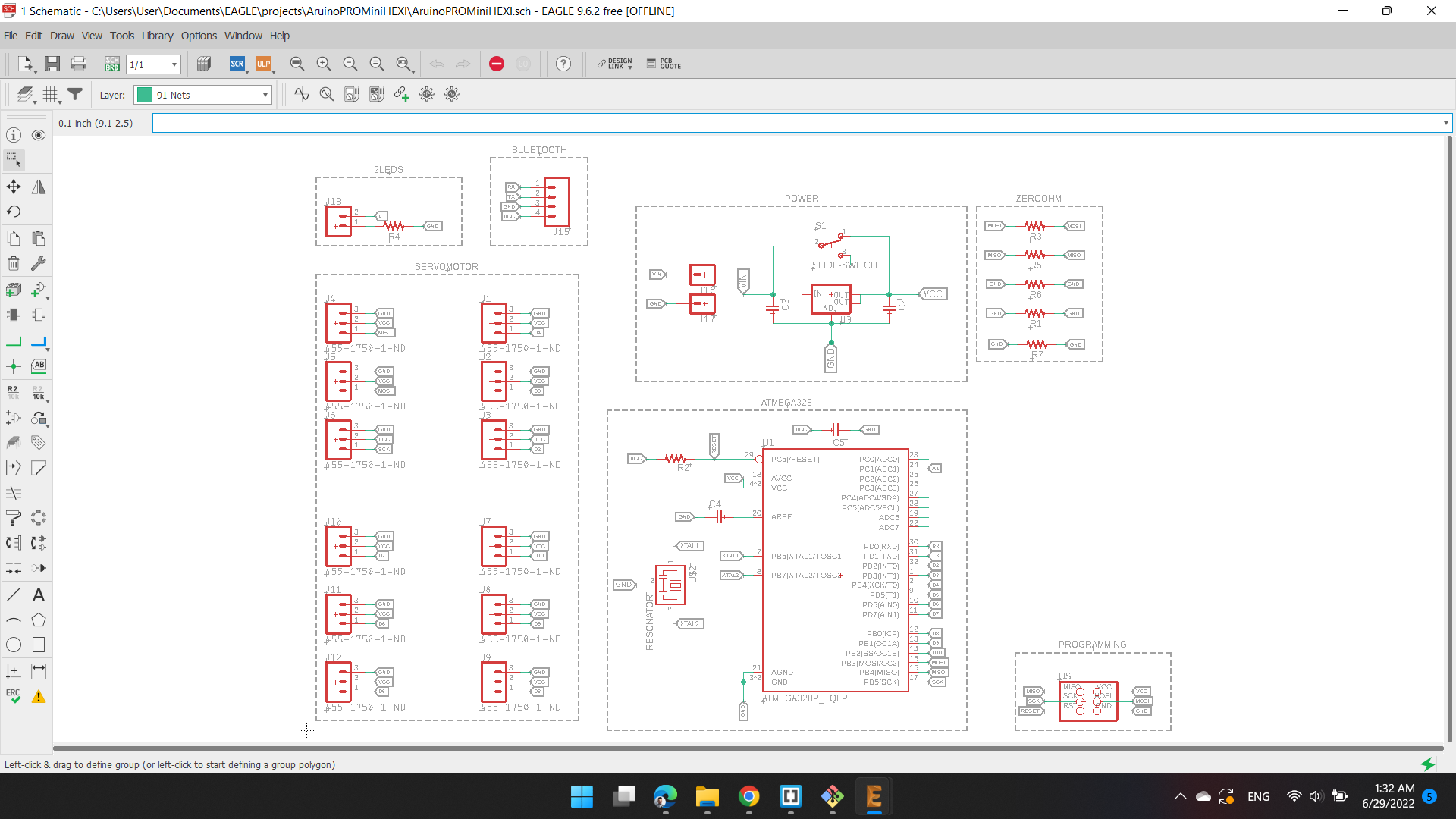
So, I started with Eagle.
My main controller is Atmega328p with 20 MHz Resonator.
The output as I mention recently the 12 Servo Motors with I used Male Pin Headers, and 2 LEDs.
The Input was HC-05 Bluetooth to be connect with the Mobile App.
Power supply will be a 12 V Lipo Battery and connected with Buck Converter to decrease the voltage to 5 V.
Here's the Schematic:
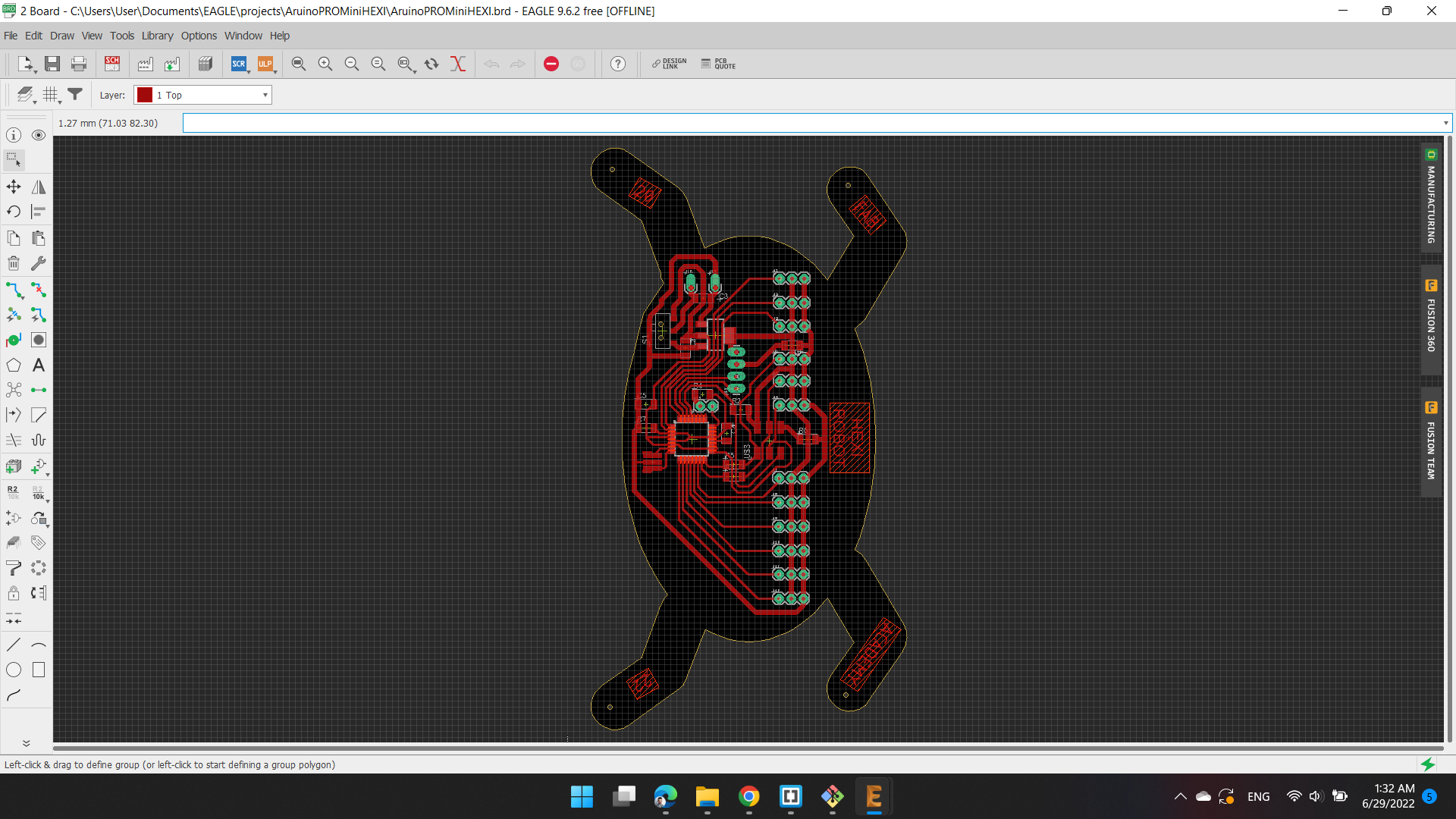
After hours of routing and collision with many closed roads, I managed to connect all wires in one side.
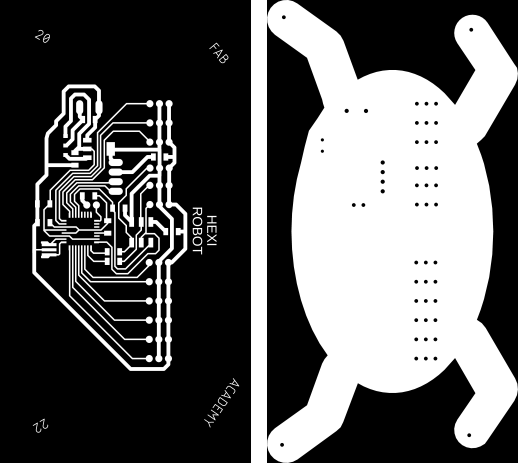
Then, I exported 2 images. 1st Top + Pads. 2nd Dimension + Pads.
You can download my files here: