Compare the performance and development workflows for other architectures.
For this assignment we compared build and performance of three microcontrollers:
Atmega 383
ESP32
ATTiny 412
CPU
8-bit AVR
32-bit
8-bit AVR
Max Clock
20MHz
2.4GHz
20MHz
Flash
32Kb
4Mb
4Kb
SRAM
2Kb
400Kb
256b
EEPROM
1Kb
384Kb
128b
UART/USART Capability
Yes
Yes
Yes
I2C Capability
Yes
Yes
Yes
SPI Capability
Yes
Yes
Yes
Wifi Capability
No
Yes
No
Bluetooth Capability
No
Yes
No
The ATmega328, is an 8-bit AVR microcontroller which provides a relatively modest computing capability with a maximum clock speed of 20 MHz. It offers 32 KB of flash memory for program storage and 2 KB of SRAM for data manipulation. While it includes 1 KB of EEPROM for non-volatile data storage, it supports only one UART and offers basic SPI capabilities. Notably, it lacks Wi-Fi and Bluetooth capability, making it unsuitable for IoT applications that require wireless connectivity.

While the ESP32 (Via XIAO ESP32C3) is a powerhouse with a dual-core 32-bit Tensilica LX6 microcontroller running at speeds of up to 2.4 GHz. It provides ample resources, typically boasting 4 MB of flash memory and 400 KB or more of SRAM. It supports multiple UARTs and SPI interfaces, making it versatile for various communication tasks. Additionally, the ESP32 includes built-in Bluetooth and Wi-Fi capabilities, making it an excellent choice for IoT projects requiring wireless connectivity.

Lastly the ATtiny412, while still an 8-bit AVR microcontroller like the ATmega328, is more compact in terms of resources. It features 4 KB of flash memory, 256 b of SRAM, and 128 b of EEPROM, making it suitable for simple, low-power applications. It offers a single USART and basic SPI capabilities but lacks Wi-Fi and Bluetooth support. Its strengths lie in power efficiency and cost-effectiveness for projects with minimal memory and processing requirements.

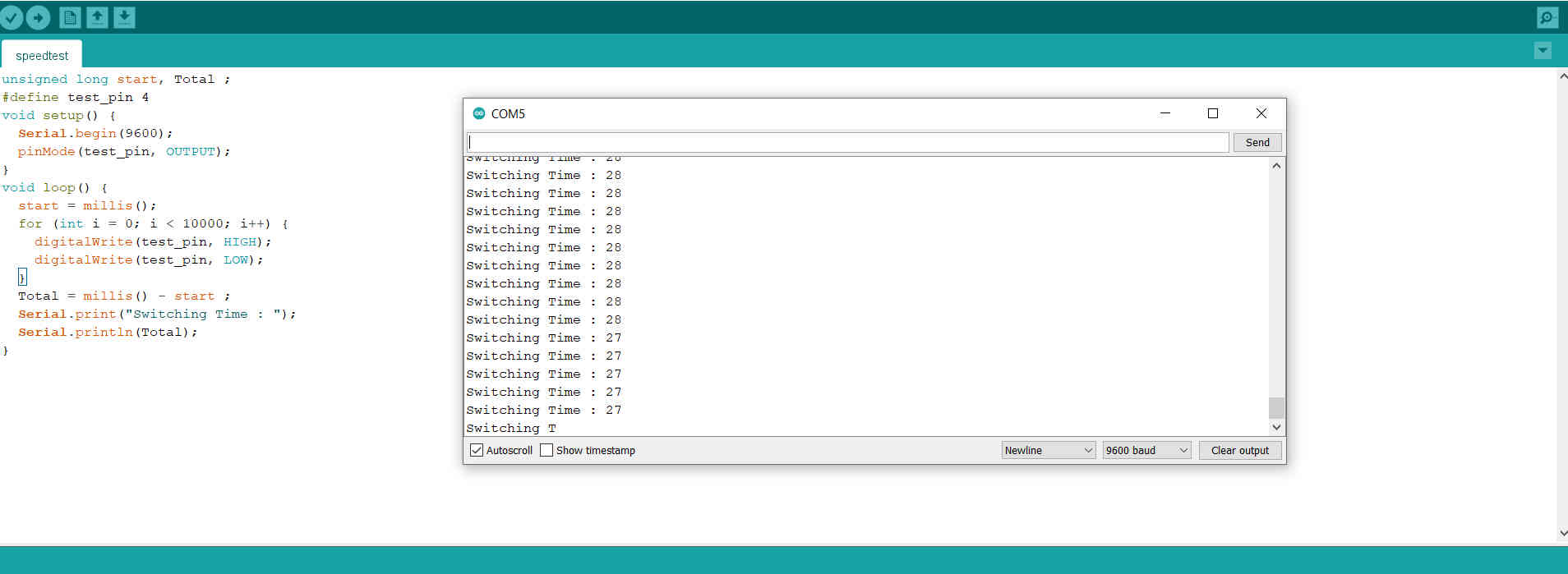
We covered the basic functionalities and capabilities of the three microprocessors, but we needed to see how well they process and respond. To accomplish this, we did a simple speedtest to check their response time. The speedtest incorporates a simple program being sent to each microprocessor that will check the time it will take to switch from a Low signal to High signal and back to a Low signal. The time taken will be recorded in milli seconds and sent to the Serial Monitor.
unsigned long start, Total ;
#define test_pin 4 //assigns pin
void setup() {
Serial.begin(9600); // starts serial
pinMode(test_pin, OUTPUT); //declares pin as output
}
void loop() {
start = millis(); //starts reading the microprocessors internal timer from 0
for (int i = 0; i < 10000; i++) { //constant time readings function
digitalWrite(test_pin, HIGH); // sets the pin to output High signal
digitalWrite(test_pin, LOW); // sets the pin to output Low signal
}
Total = millis() - start ; //time reading after previous reading
Serial.print("Switching Time : ");
Serial.println(Total); // displays results on serial monitor
}

The program was first uploaded to the Arduino Uno using the pin 3. The switching time read between 89 and 90 ms.

The program was then uploaded to te XIAO ESP32C3. The test pin was assigned to pin D8 and the switching time read at 10ms.

The program was uploaded to the ATTiny 412 development board. The test pin was assigned to digital pin 4 and the switching time was read at 28 and 27ms.
In summary, the choice among these microcontrollers depends on the specific project needs, with the ATmega328 and ATtiny412 suitable for less resource-intensive tasks, while the ESP32 excels in performance and connectivity for more demanding applications, especially those involving Wi-Fi and IoT functionalities. Although similar architecture, The ATTiny412 responds much faster than ATmega328 on the Arduino Uno board.