Principles and Practices
The first week of the program was a long week since we had to cover two main topics, "Principles and practices" and "Project management". I decided to start with project management to get used to Git, GitLab, MKDocs, and most important documentation. Nevertheless, I also managed to sketch one of the ideas that I have for my final project.
An idea for my Final Project
I love making robots specially when they will be used to learn about robotics, programming and electronics. Nevertheless, I realized that there are no low-cost kits to create multiple robots with servomotors and motors. Most of the time, we must design the whole robot because the accessories to hold a motor or a servomotors are not easily attachable. Therefore, my idea is to create a special holder for servomotors and motors to put many actuators together and build multiple robots. The holder will be design in a way that can be fabricated with no trouble and most importantly that has a special attachment to be a clip and play robot.
The general idea of the holders and some of the robots that can be made is shown below:
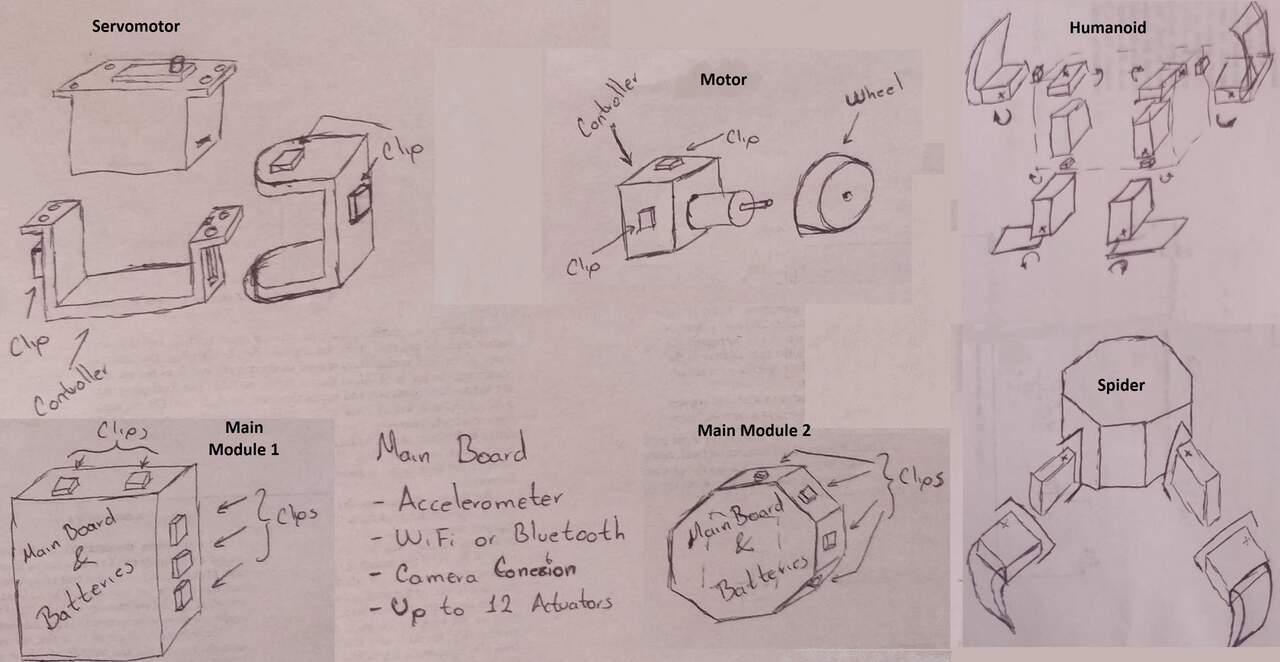
As can be seen in the previous image. With the special holder for the servomotor and motor you can create multiple bodies or robots. I want to try to have an individual controller in each holder so I can controller every actuator with the main controller via I2C. However, it might be easier for send the required wires to the main controller. Another idea for the main controller is to have Wi-Fi and/or Bluetooth connection to create an app and manipulate the robot via wireless. Also the controller must have an accelerometer in case the person build an humanoid, it can detect when it falls. Finally, I am analyzing the possibility to have a camera connector in the main board to attache a camera in case that the robot needs it.
Go Back Student Agreement