BACK TO HOME PAGE
WEEK 9
Mechanical Design, Machine Design
Group Assignment
Design a machine that includes mechanism + actuation + automation, Build the mechanical parts and operate it manually. Actuate and automate your machine,Document the group project.
Self Balancing Robot
The task for this week is to create a machine that includes mechanisms, actuation, and automation. We considered a variety of options in light of the above requirements, with the self-balancing robot coming out on top due to its importance and benefits.
Theory of Self balancing Vehicles
A pendulum that is inverted will not be able to balance on its own. Try balancing a broom stick on your fingers as an example of this You can't stay in one place, you have to move your finger back and forth. This is exactly what the vehicle is doing, its moving back and forth so that the center of gravity will always remain under the wheels.
To drive the motors we need some information on the state of the robot. We need to know the direction the robot is falling, how much the robot has tilted and the speed with which it is falling.
We'll use a combination of a gyroscopic sensor and an accelerometer to acquire this data. MPU6050 is the sensor we'll be using. We integrate all of these inputs to create a signal that controls the robot's motors and maintains it balanced.
How did your team influenced your programming decisions?
I have programming knowledge because I have worked in a variety of places, including the NJV Fablab and several competitions, and in week 5, I helped to my team members on push button code in the pcb board that we built for the first time. I also informed my colleagues that I am capable of coding. So my team member has believe in me and has delegated programming to me.
My Role
My job for this week was to create microcontroller coding.
Programming
In the beginning, I have chosen the coding section because no one in my team knows how to program, and I have prior experience in Arduino microcontroller coding. In the past, I participated in various robotics competitions, so I was familiar with microcontroller coding through competitions and exhibitions, and I was also interested in programming.
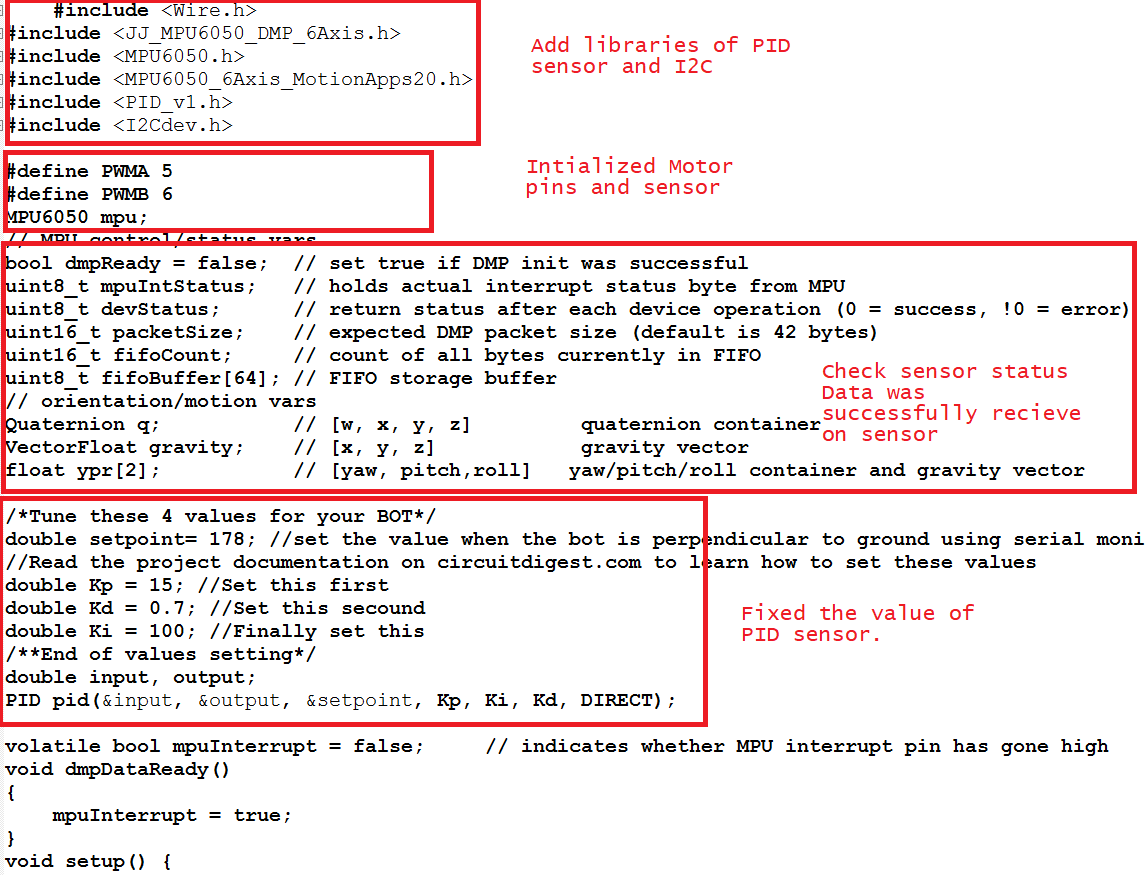
PID sensor calibration and initialized In/Out pins.
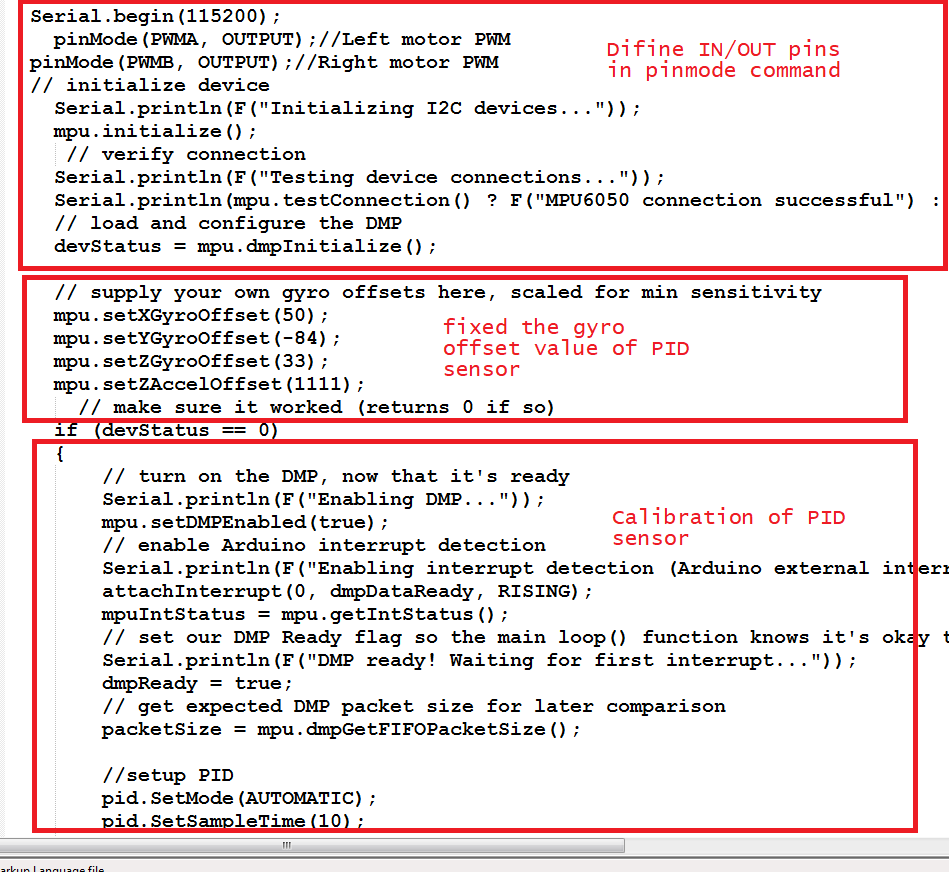
The offset value is fixed and defined in pinMode.
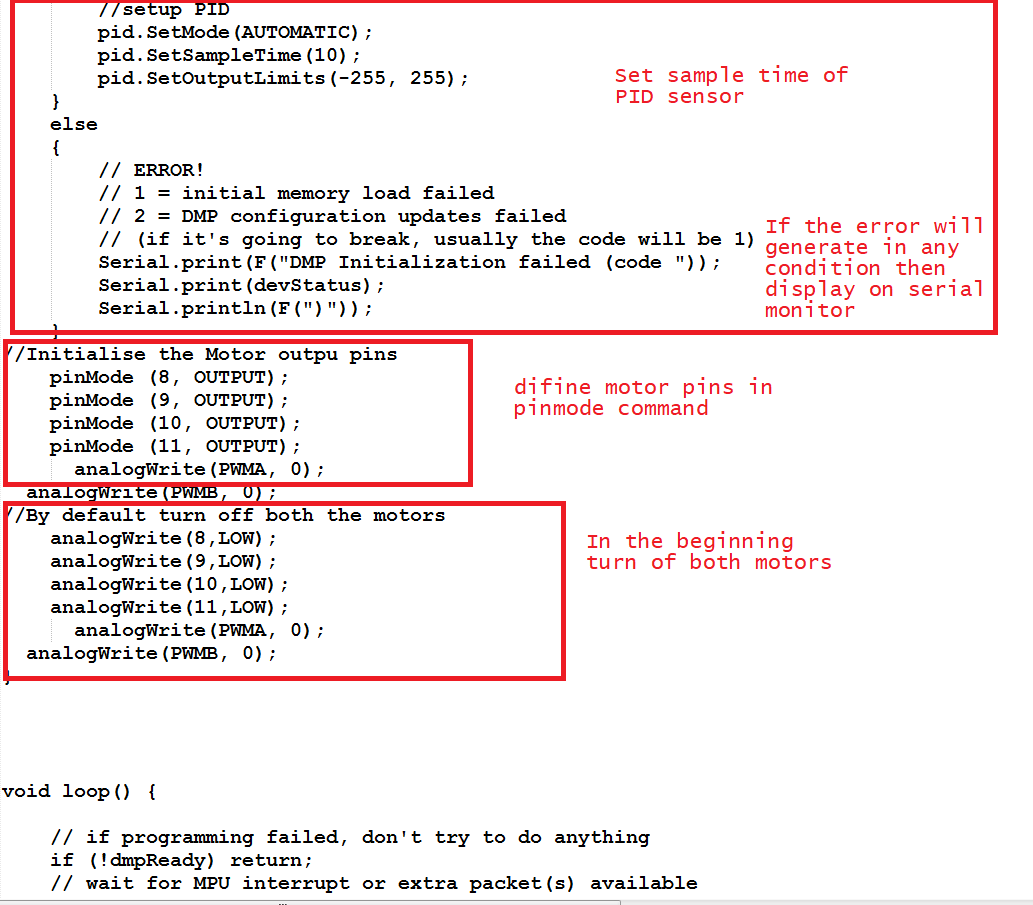
Motor pins initialized.
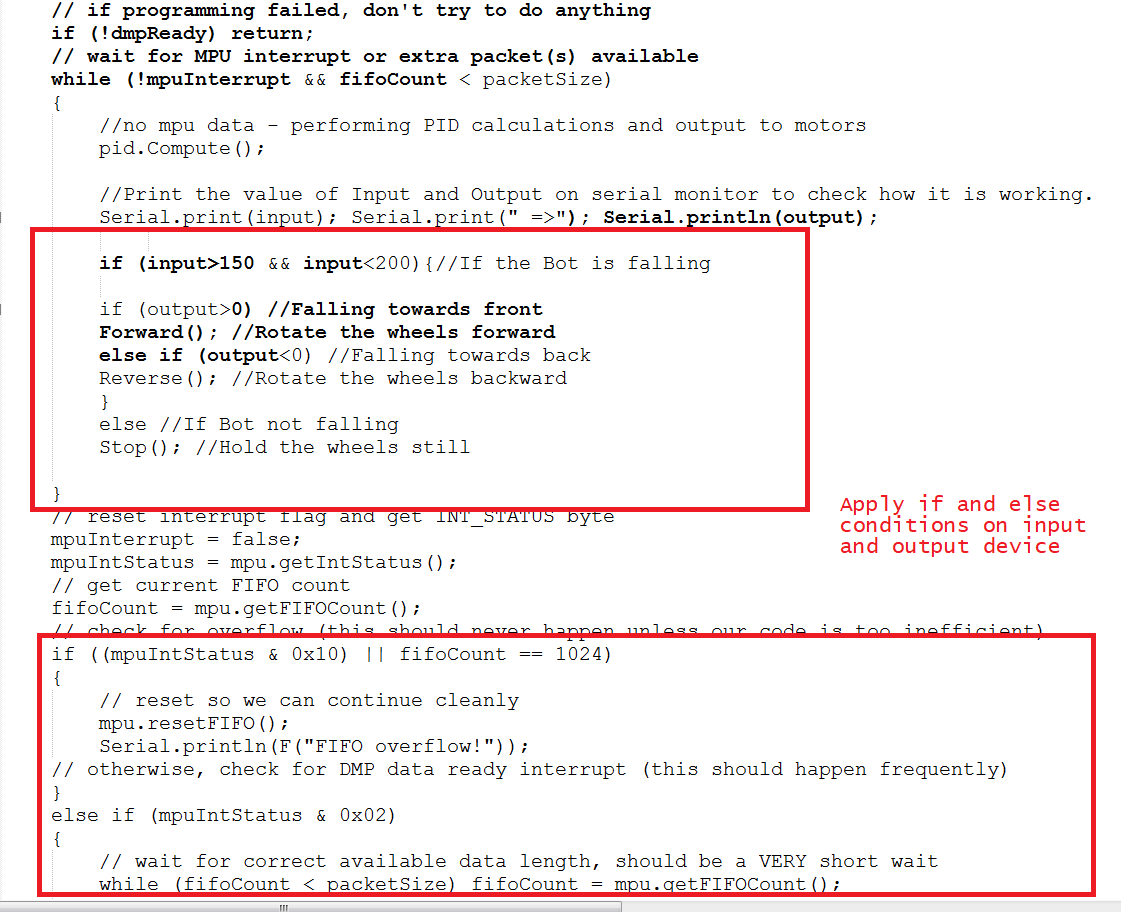
Apply different conditions to the PID sensor.
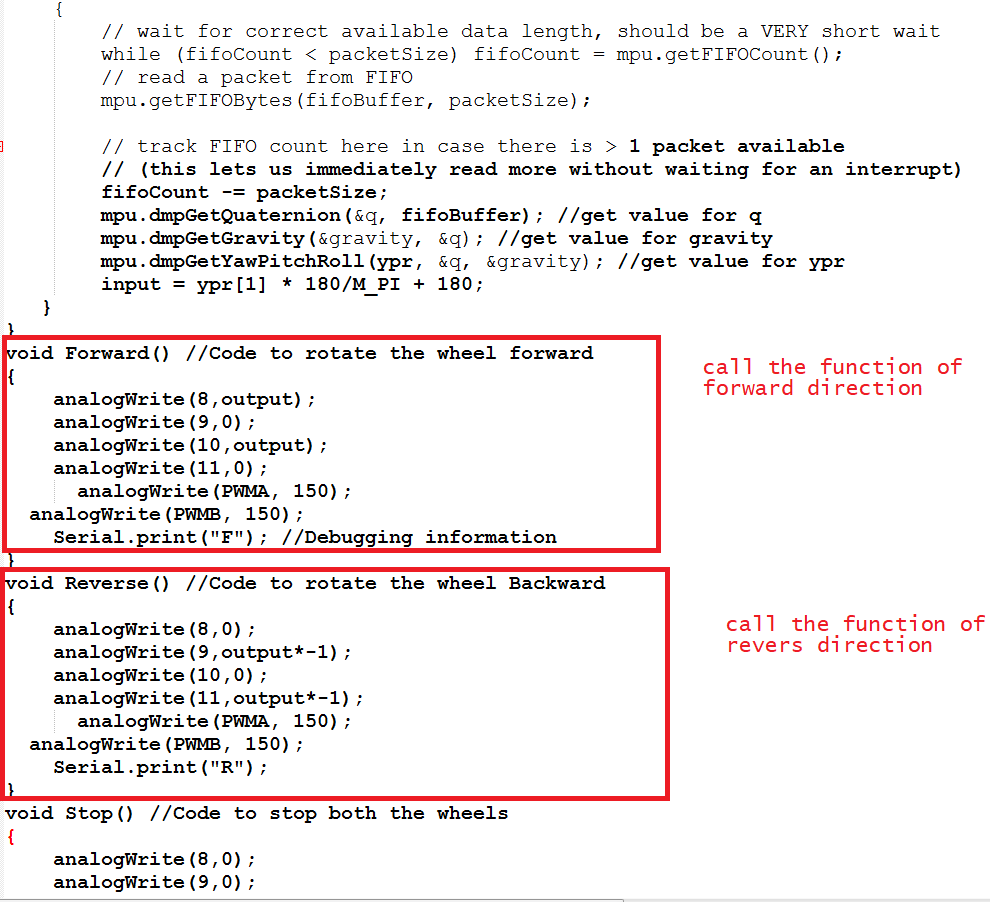
Call the Forward and Reverse function.
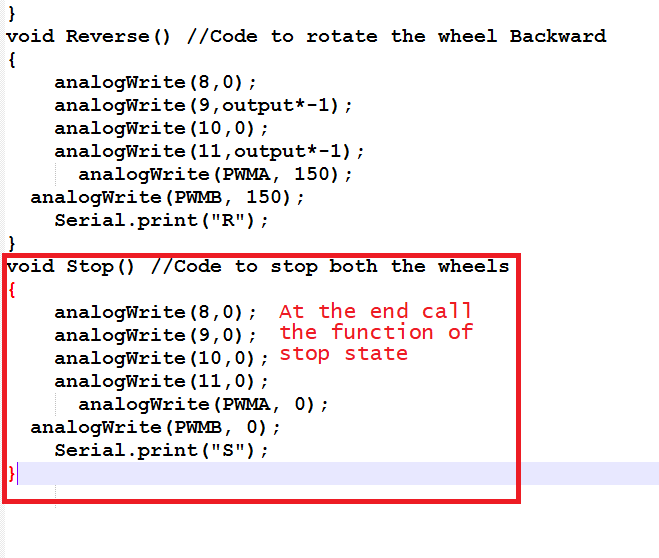
Call the Stop function.
Final Video:
"Click here"to download all files of this week