Week 11 - Applications and implications
This week was about defining the a final project masterpiece that integrates the range of units covered during the FABACADEMY lectures. This week lecture provided a tour on all previous and possible projects that might inspire us to decide for a final project masterpiece. All the reviewed projects covered a large number of fields: medical, electronics, test equipment, consumer electronics, phone, terminal, laptop, network, satellite, machines, robots, inflatables, boats, bicycles, drones, cars, environment, energy, food, biology, microscope, prosthetics, shoes, clothes, toys, art, musical instruments, furniture, houses, labs,...
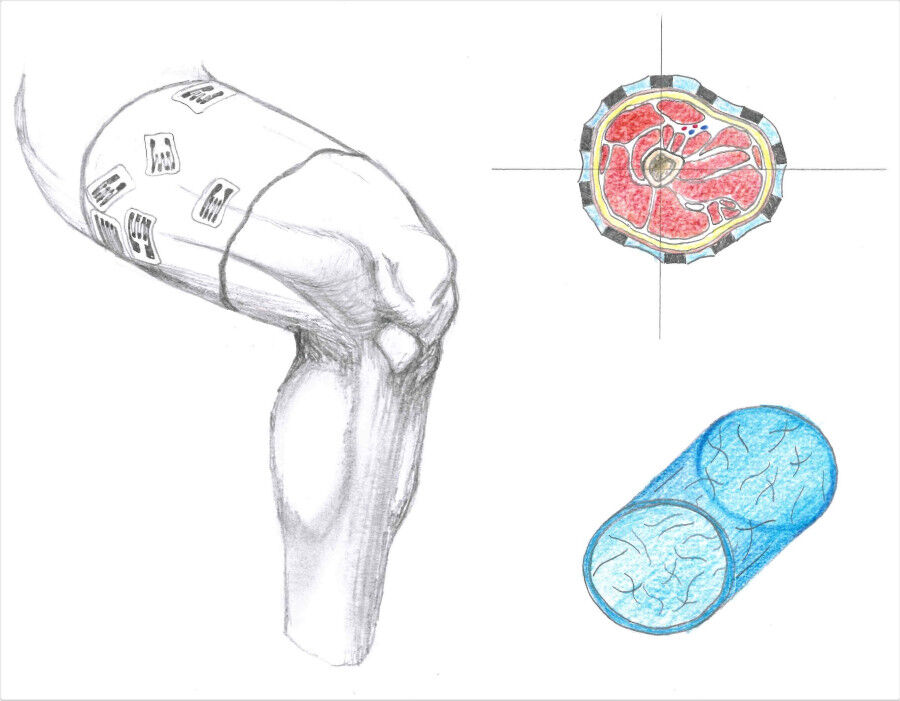
Draft of my smart thigh compression sleeve with three possible technologies
As a masterpiece I chose to design a smart thigh compression sleeve. In this section I will try to answer different questions such as "What will it do?", "Who's done what beforehand?", "What will you design?"... and address some issue I have to solve to be able to go further.
What will it do?
The smart thigh compression sleeve must be able to measure the displacements of the thigh soft tissues, be it due to muscle contraction or to interactions with the environment (e.g. when the wearer sit on a chair). This kind of device might be very useful for many fields such as biomechanics, wearable robotics and rehabilitation. The main issue I attempt to solve with that compression sleeve is the interface migration of wearable robots in general, and in particular of knee goniometers. To precisely measure the kinematic of a human knee a six DOFs goniometer is needed. The main drawback of this technology is that the reconstruction of the knee kinematics between the femur and the tibia will only be precise enough if the goniometer is rigidly attached to the human leg bones. Yet this is not the case since the femur is surrounded by muscles and soft tissues, the only available place to attach the goniometer. With the smart thigh compression sleeve we might be able to set an initial position of the thigh state and track the migration of the goniometer attachments.
Who's done what beforehand?
I didn't find a topic exactly related to my project but I have found a lot of useful articles to help designing my smart thigh compression sleeve. The most useful article is about an Automated Sensor Design developed by Disney research and the University of Rey Juan Carlos. I also checked the written production of one of the article authors, Espen Knoop, who has a solid background in soft robotics that might be helpful. Basically the Automated Sensor Design aims at optimizing the number of sensors and their place inside a soft robot to be able to precisely measure its position. I still have many questions about the way that algorithm works but I think it might be a very useful technique to distribute the sensors inside the compression sleeve. Hereinafter is a video that summarize the concept and results of this article.
MakeSense: Automated Sensor Design for Proprioceptive Soft Robots
In this article the sensors that are used are silicone (or urethane) tubes (inner diameter 0.3 mm, outer diameter 0.7 mm) filled with Eutectic Gallium Indium (EGaIn).
Another very useful source of information is the website of Soft Robotics Toolkit. In the Sensors website section there are two types of soft sensors (EGaIn Sensors and Textile Silicone Hydric Sensor) that might be used in the design of the smart thigh compression sleeve and their fabrication is very well described.
I also had a look among the various FABACADEMY projects by using the following keywords on the search engine of the FABACADEMY website [sleeve, smart clothes, soft robots and soft sensors] and I found the following results:
- E-textile with few LEDs around a T-shirt collar.
- A smart garment that monitors the wearer's body temperature and heats up when the user’s core body warmth drops below the level of comfort.
- A basketball sleeve that can predict shot power and accuracy. Basically it consists in an elbow goniometer with only one DOF.
- In this week assignment, Rodrigo Gamboa tested soft sensors. He used a conductive rubber cord stretch sensor and encapsulated it in a silicon box by using the casting and molding technics.
- A soft sensing robot with embedded electronics. This project is also interesting for the casting and molding technics and the flexible electronics.
- A posture corrector consisting in a T-shirt that embeds an accelerometer and Bluetooth communication.
None of these results is closely related to what I want to do, i.e. none of these results uses soft strain sensors to evaluate the geometry of the clothing. However these results are somehow related to my project by the manufacturing technics employed to build the final product such as casting and molding, sewing (and possibly electronic thread sewing), etc.
What will you design?
The system will consist in several soft sensors encapsulated in a silicone hollow cylinder doubled in its inside with a breathable fabric.
How will the project be managed?
To manage this project I'll divide it in several loops. One of these loops will consist in building several soft sensors and test their capabilities.
- Build or buy 3 types of soft sensors
- Test 3 types of soft sensors
- Make the electronics
- Molding and casting
- Build a GUI
- Develop a test bench
What materials and components will be used?
Since the work was divided in several tasks, it is logical to divide the material list depending on the tasks that must be performed.
The hollow cylinder
- A low viscosity silicone (e.g. Mold Max™ 14NV, a Shore 14A tin-catalyzed silicone rubber that offers low viscosity, fast cure and long library life): 31.15€/1.2kg (formx.eu)
- PLA filament (for the 3D printed mold) : ±20€/kg
- Breathable fabrics (Fabrics for Sportswear): between 10 and 20€/m (see here)
- 3 possible types of soft sensors (see description bellow)
- Electronics components from the standard FABLAB inventory
Use of silicone (or urethane) tubes filled with Eutectic Gallium Indium (EGaIn)
- Silicone (or urethane) tubes (inner diameter 0.3 mm, outer diameter 0.7 mm): e.g. GURU Micro Silicone Tube - 3.29€/1.5m
- Eutectic Gallium Indium (EGaIn)
The fabrication process when using silicone tubes is barely described in the article about Automated Sensor Design section IX. Another fabrication technics is described on the soft robotics toolkit website, but the Bill of Materials is a little bit longer.
Use of flex sensors: a solution to buy
- Flex Sensor is a 4.5" bendable substrate that gives higher resistance readings as it flexes to a tighter radius. It costs 19.12€/unit (see here).
Use of Textile Silicone Hybrid Sensor
The last type of soft sensor that might be useful to measurement the deformation of the thigh is a Textile Silicone Hybrid Sensor. The bill of materials to build this type of sensor is even longer than the two previous ones and the tools and equipment that this fabrication technics requires are very specific.
- Elastomer layers: Ecoflex 00-30 2-part silicone rubber, Mixing cups, Mixing sticks.
- Tools and Equipment: Lab gloves, Centrifugal mixer, Lab oven, Mass scale, Film applicator, LCR meter, Laser cutter, Iron.
- Other Materials: Masking tape, Conductive fabric Med-tex 130, Fabric scissors, Roller, Loctite 416, 0.3mm Micro coaxial cable, Thermal seam tape Bemis 3914 Sewfree and Acrylic sheet (large enough to fit sensor).
The Test Bench
For the last part of that project, I'll have to assess the capabilities of the smart thigh compression sleeve. To do it I'd like to develop a test bench that will apply know deformations on the compression sleeve.
- MDF or plywood
- PLA filament (for the 3D printed mold) : ±20€/kg
Where will they come from?
I'll try to use as much as possible the material that is available in a FABLAB. For the rest, most of the things can be bought in Belgium or online. My only concern is about chemical or allows such as Silicone and EGaIn.
How much will they cost?
Since all fabrication steps are not clearly identified yet, this is difficult to estimate the cost of the final product. Indeed I still have to decide which type of sensors will be used.
What parts and systems will be made?
This question is probably redundant with the question "What materials and components will be used?", here is a sum up of will be handcrafted:
- Individual soft sensors
- A mold for the silicone hollow cylinder
- A PCB board to make the acquisition of the measurements
- A test bench to test the capabilities of the compression sleeve.
What processes will be used?
Here are all possible processes that might be used.
- Casting and molding
- 3D printing or 3D cutting
- Electronics
- Composite materials
- Possibly Sewing
- Laser cutting (to cut the breathable fabric)
What questions need to be answered?
Here is a list of questions I still have to answer and that might be blocking points in the future:
- Which type of sensors to use?
- What is the precision and lifetime of the sensors?
- How to build the sensors?
- How to wire the sensors?
- What will be the precision of the machine?
- How to paste the fabric inside the silicone hollow cylinder?
- Which fabric to use? (mesh or something else that is smoother but let breath the skin)
- Can we buy EGaIn in Belgium? Where to find it?
- How many sensors do I need in the smart thigh compression sleeve? (Run the optimization algorithm)
- Do we have the material for Textile Silicone Hybrid Sensor
How will it be evaluated?
One possible solution to evaluate the smart thigh compression sleeve precision might be a test bench on which we could install the hollow cylinder. The test bench would be able to apply various kinds of radial and tangential deformations that might reproduce the behavior of the thigh muscles. By changing the configuration of the test bench we might be able to apply various known deformations on the compression sleeve. By computing the difference between the position of the test bench and the position derived from the compression sleeve measurements, we might be able to compute the error between the real configuration and its measurement.
Another possible solution to evaluate the device is provided in the article about Automated Sensor Design and consists in checking the measured displacement with a precision motion capture and 3D video tracking system, e.g. OptiTrack. This solution might be very useful to test the capabilities of the thigh compression sleeve in vivo situation.
What does still need to be done in this section?
- Evaluate price better
- Detail loop management better
- Read again the article about Automated Sensor Design and check the references for more detail.
FAB ACADEMY 2020 source
20200401 applications and implications from Academany on Vimeo.