what tasks have been completed, and what tasks remain?
Preetty much everything is done, however, I have decided to use triage and not do the trowel design because the printing works fine as it is.
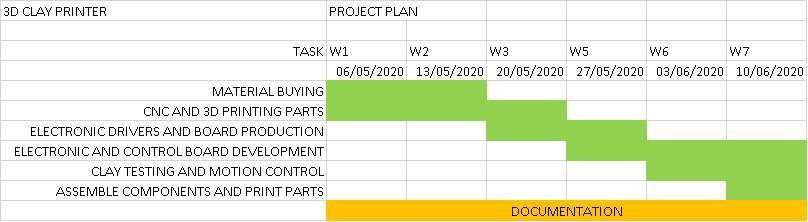
This is the calendar I used:
Project Plan
So far, I've done much of the CAD work and the parts list for the mechanical design. I wil use the coming 3 weeks to fabricate all of that and start designing and sourcing the electronics.
Here is my current project plan:
what has worked what hasn't
One of the biggest problems was the pressure needed to get this networking. I messed up some screws. The auger screw bent on one ocassion, but I replaced it with a new one, and just eased the speed on the screw feed rate.
what questions need to be resolved
I think that I need to resolve the clay mixture. There is a lot of work to be done on that. If there is a very liquid mixture, the print will collapse, if it's too solid, it won't print.
what have you learned
I really think that I learned a lot during this experience.
For starters, I had never done any electronics design or anything like that, so that was very interesting. I think that b now, I'm pretty good with stepper motors, and also I know a lot about clay printing ingeneral now.
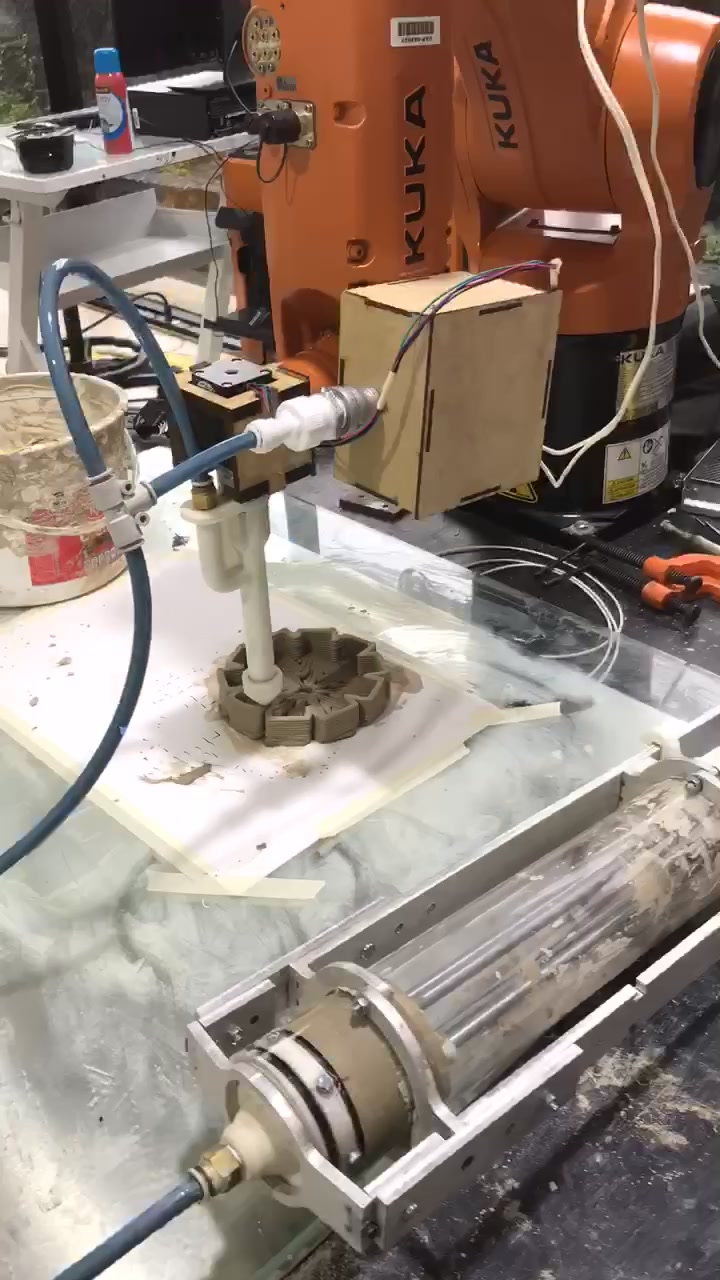
FINAL PROJECT DESCRIPTION
This is my final project. It consists of a clay extruding system for use with our kuka KR6 robotic arm.
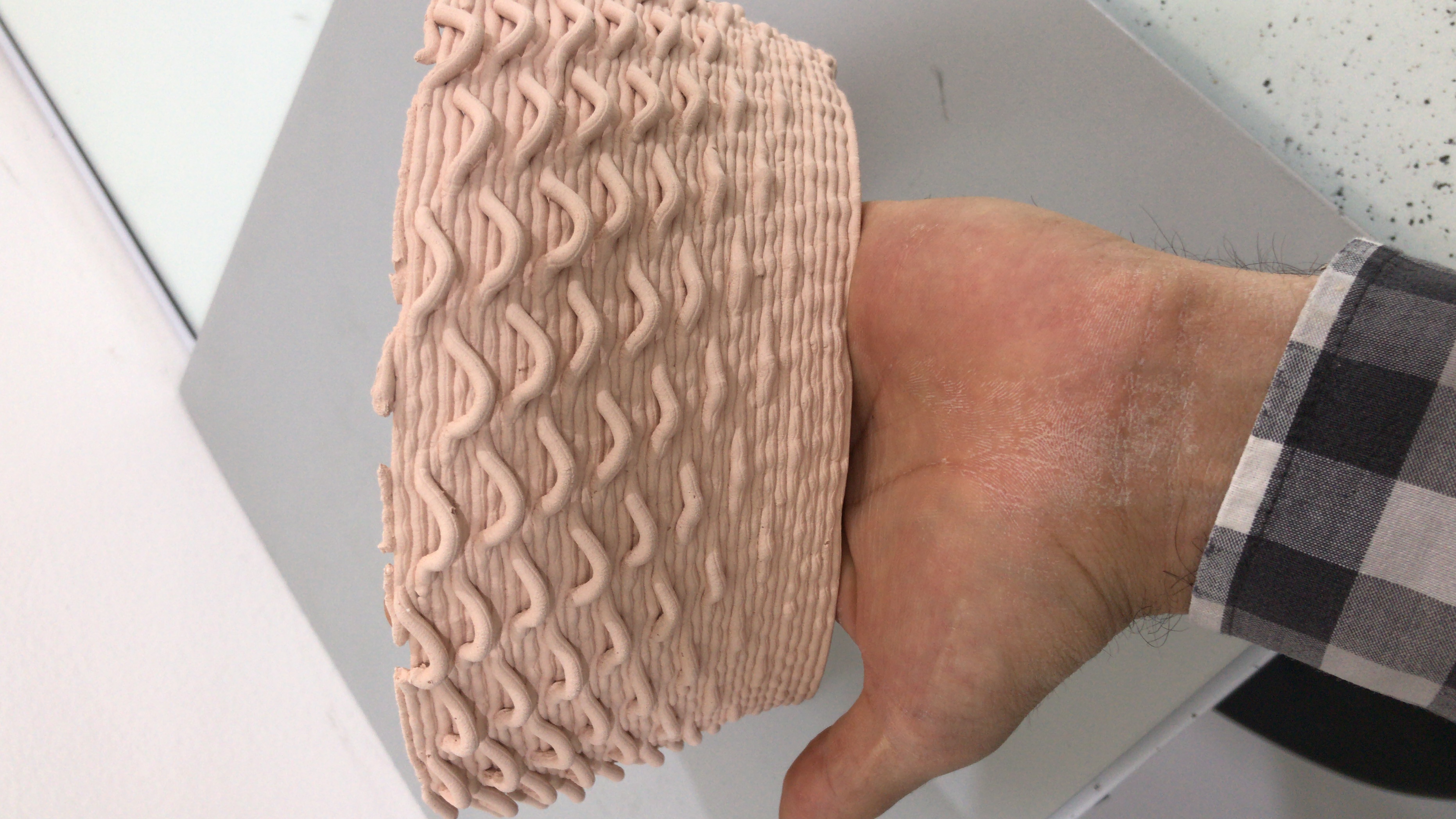
This is a printed piece I made with it:
This is the fired print, which Neil asked me to see when I presented back in 2021.
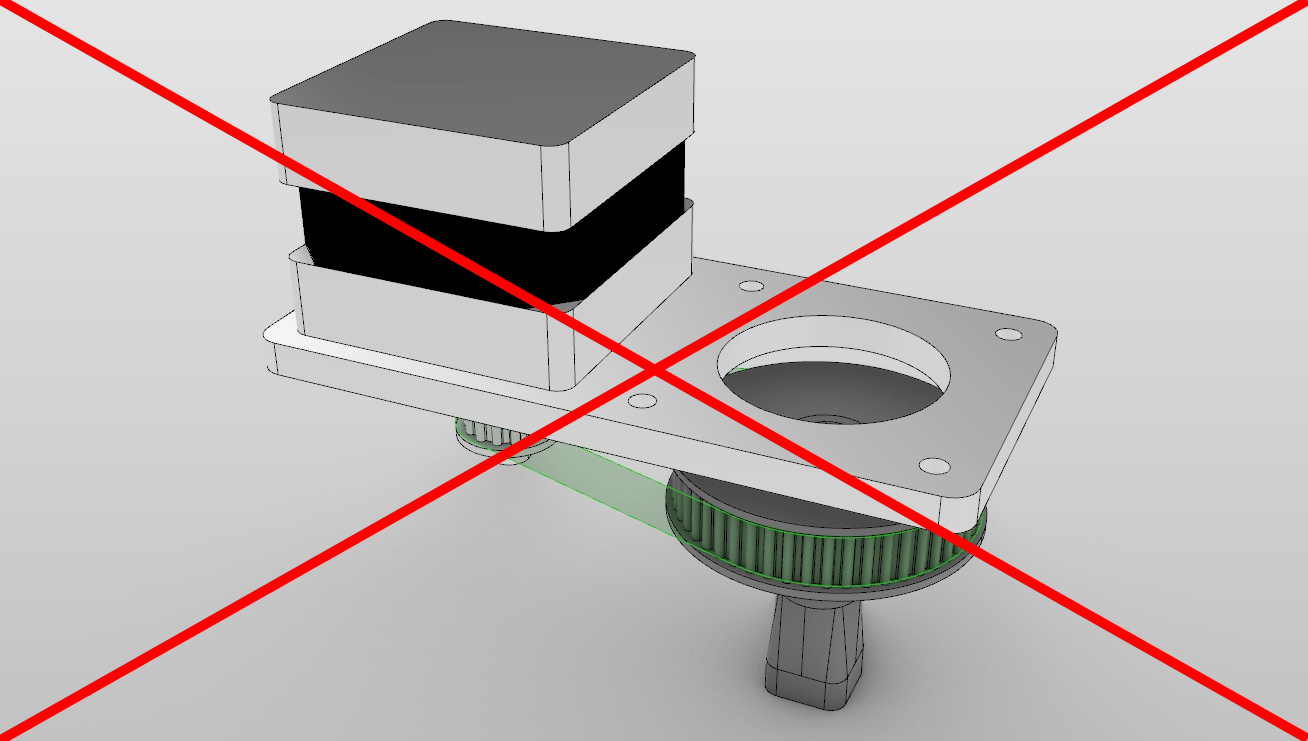
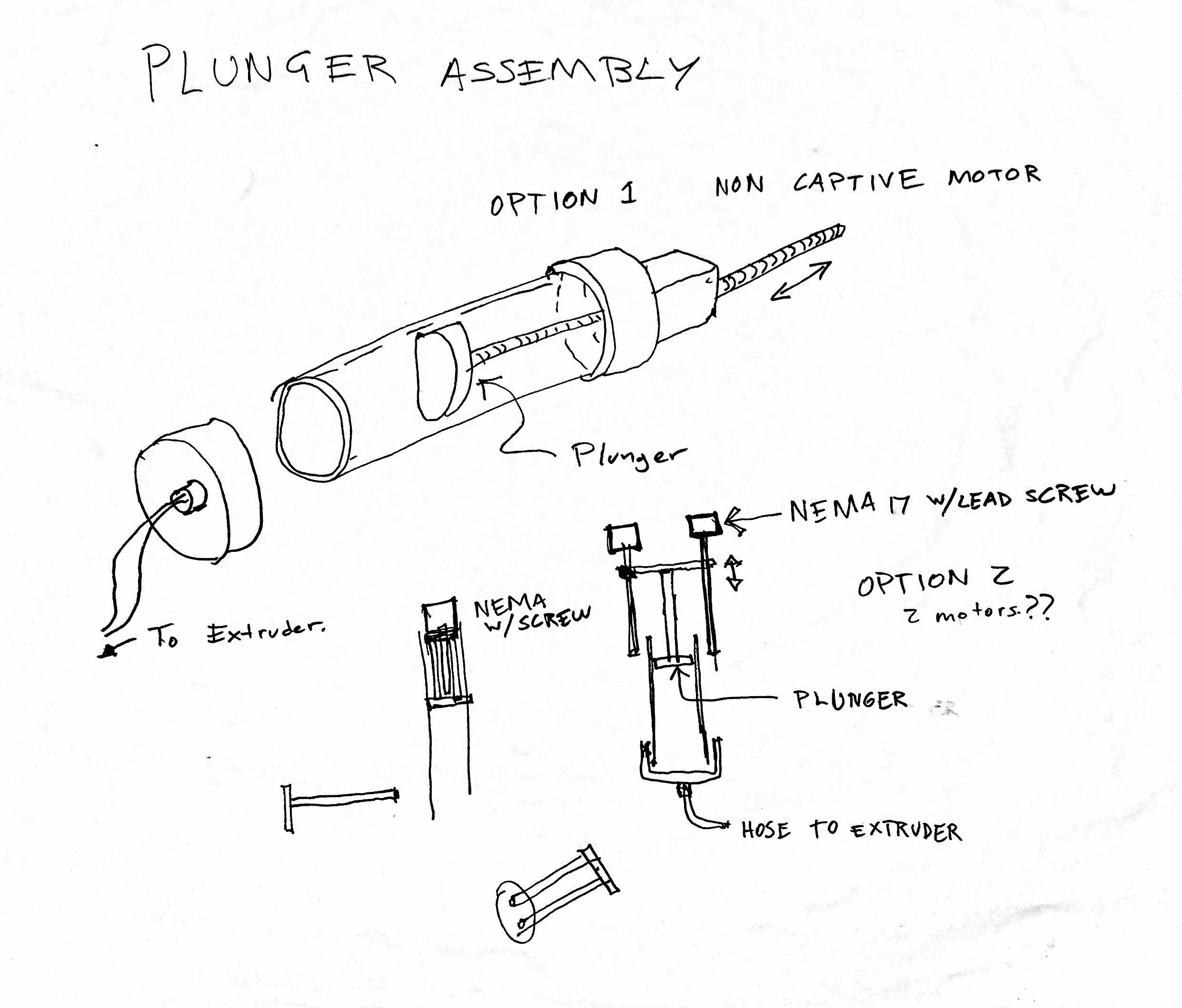
Notes and sketches on the Final Project
The basic idea is to have pressurized clay come into a tee fitting that I can machine out of brass(I have some experience with metal machining and lathe turning). Inside the tee fitting there will be a screw that rotates and pushes the clay downwards through the nozzle piece that can rotate while attached to a belt and pulley system. The nozzle will be 3d printed to allow for easy testing and swift interchangeable designs.
There are two important areas of focus: the first is the end mechanism that does what is described in the diagram, and the second is the mechanism that provides the pressurized clay. I'll try to develop those in parallel and hopefully finish both, but the plan is that the project could work with either of the two systems.
Materials and Components
This is the current Bill of Materials (BOM). It details vendors, price, and quantities. Will be updatedd as the project progresses.
Project Plan
So far, I've done much of the CAD work and the parts list for the mechanical design. I wil use the coming 3 weeks to fabricate all of that and start designing and sourcing the electronics.
Here is my current project plan:
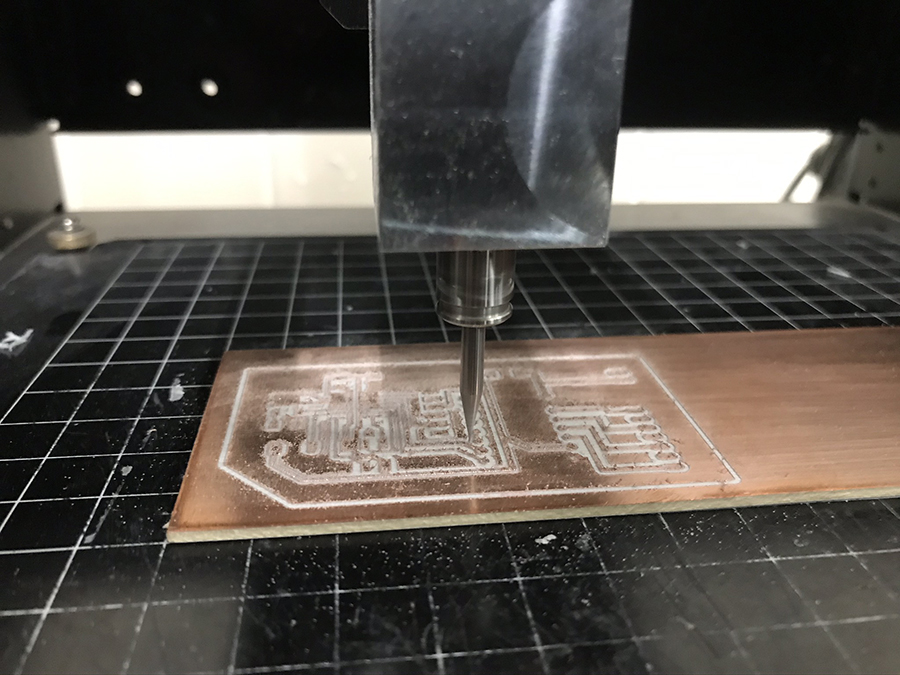
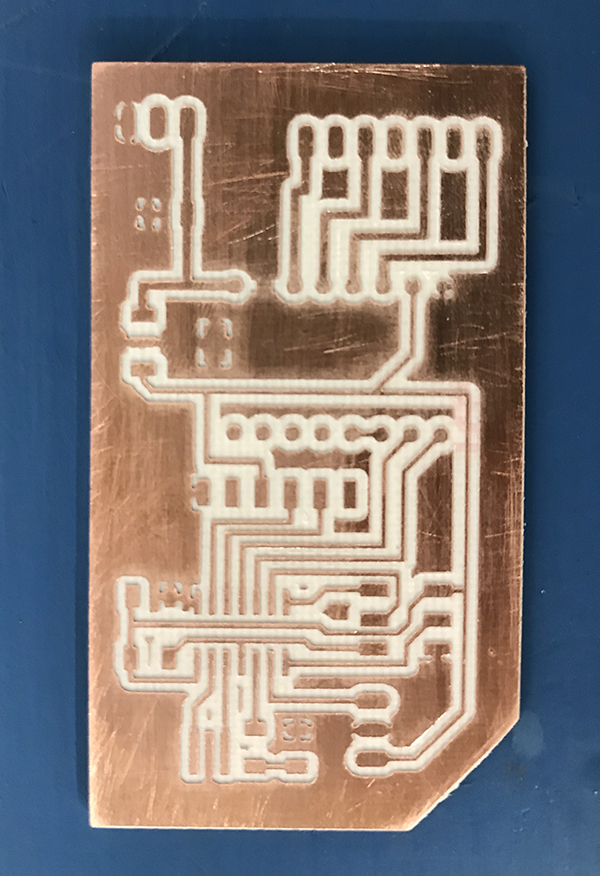
Electronics Design and Production
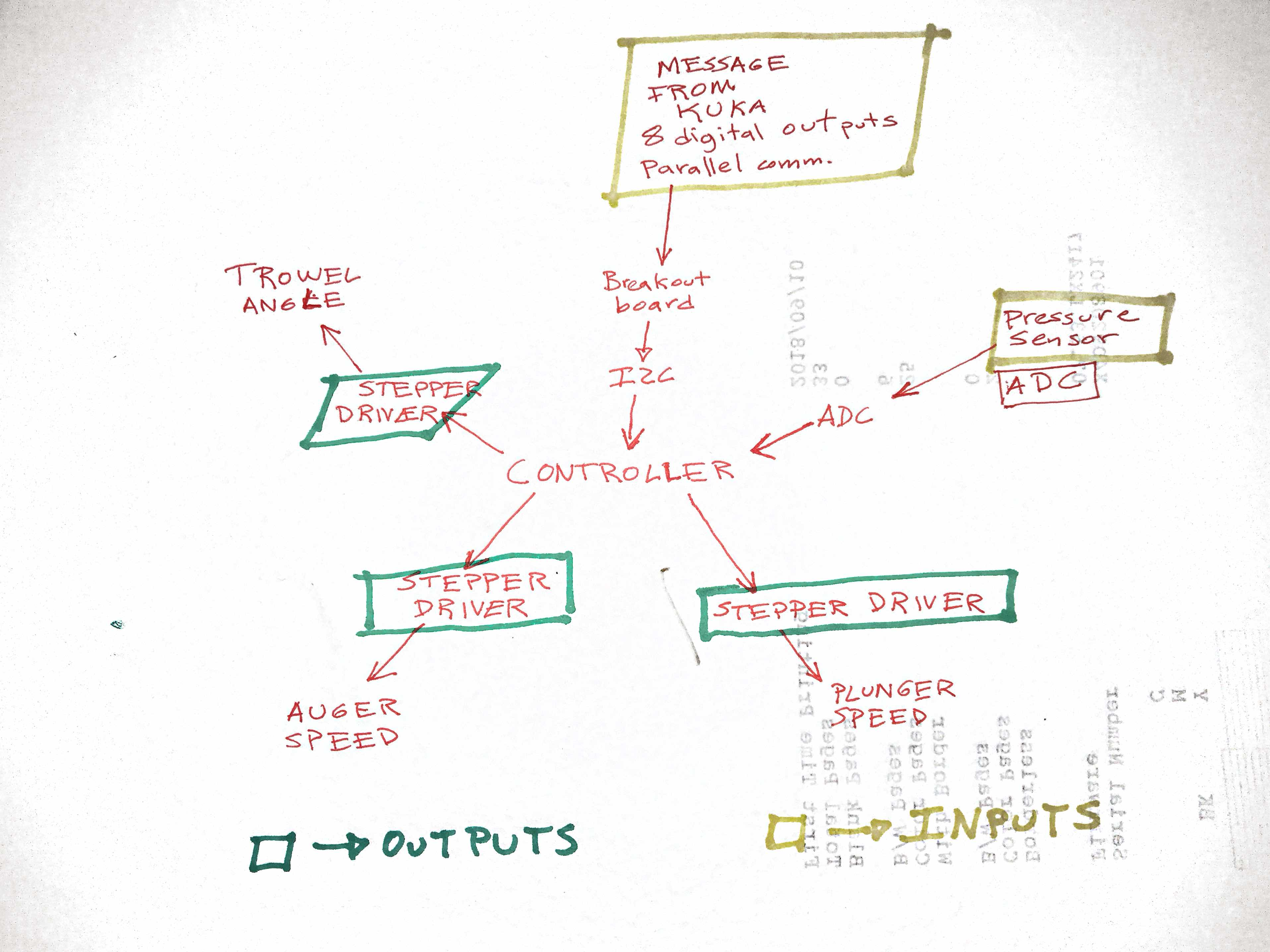
My electronic system consists of a pololu A4988 stepper driver and an ATTiny44 that controls the stepper and receives input from the pressure sensor. More on this phase can be found at input and output devices
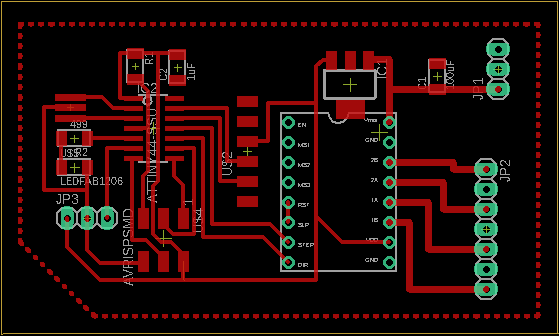
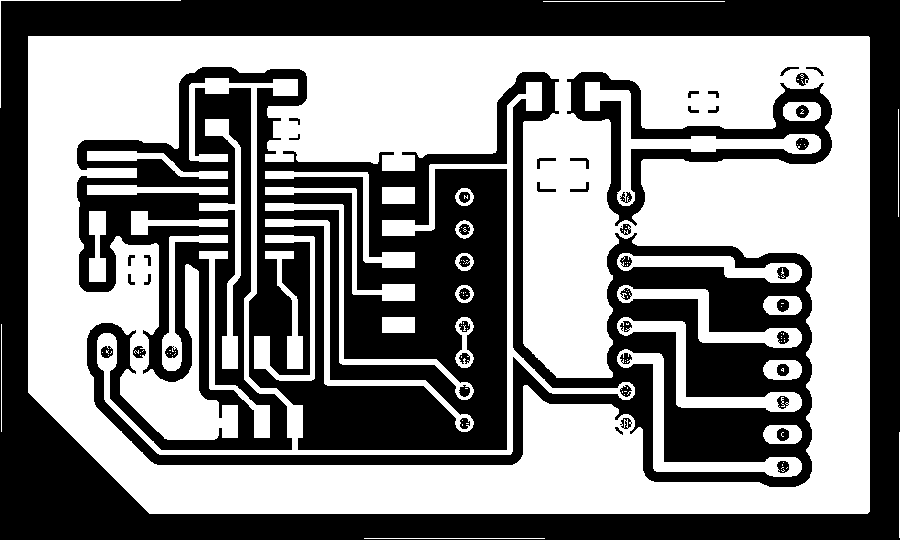
This is the board I designed. It makes the pulses for the driver from an ATTiny44.
It uses a serial interface to receive commands from the computer. More on this on the networking and communication page or the interface and application programming page.
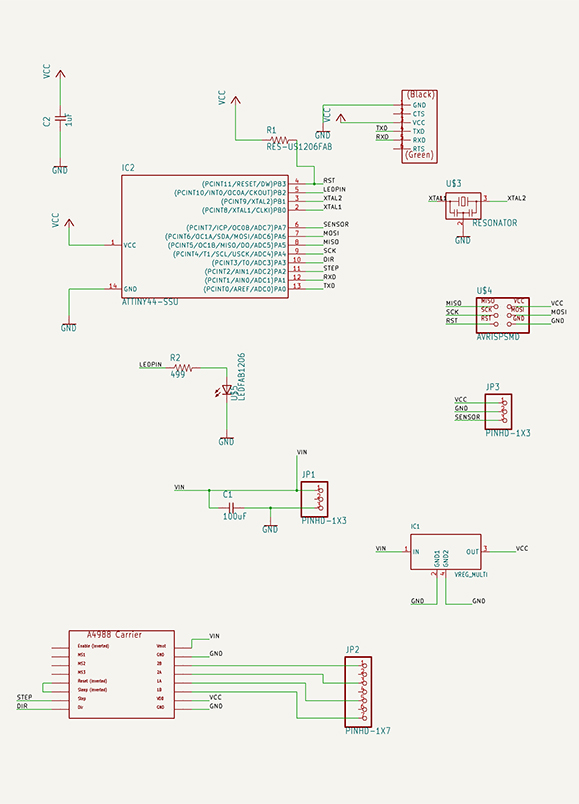
Here is the schematic image:
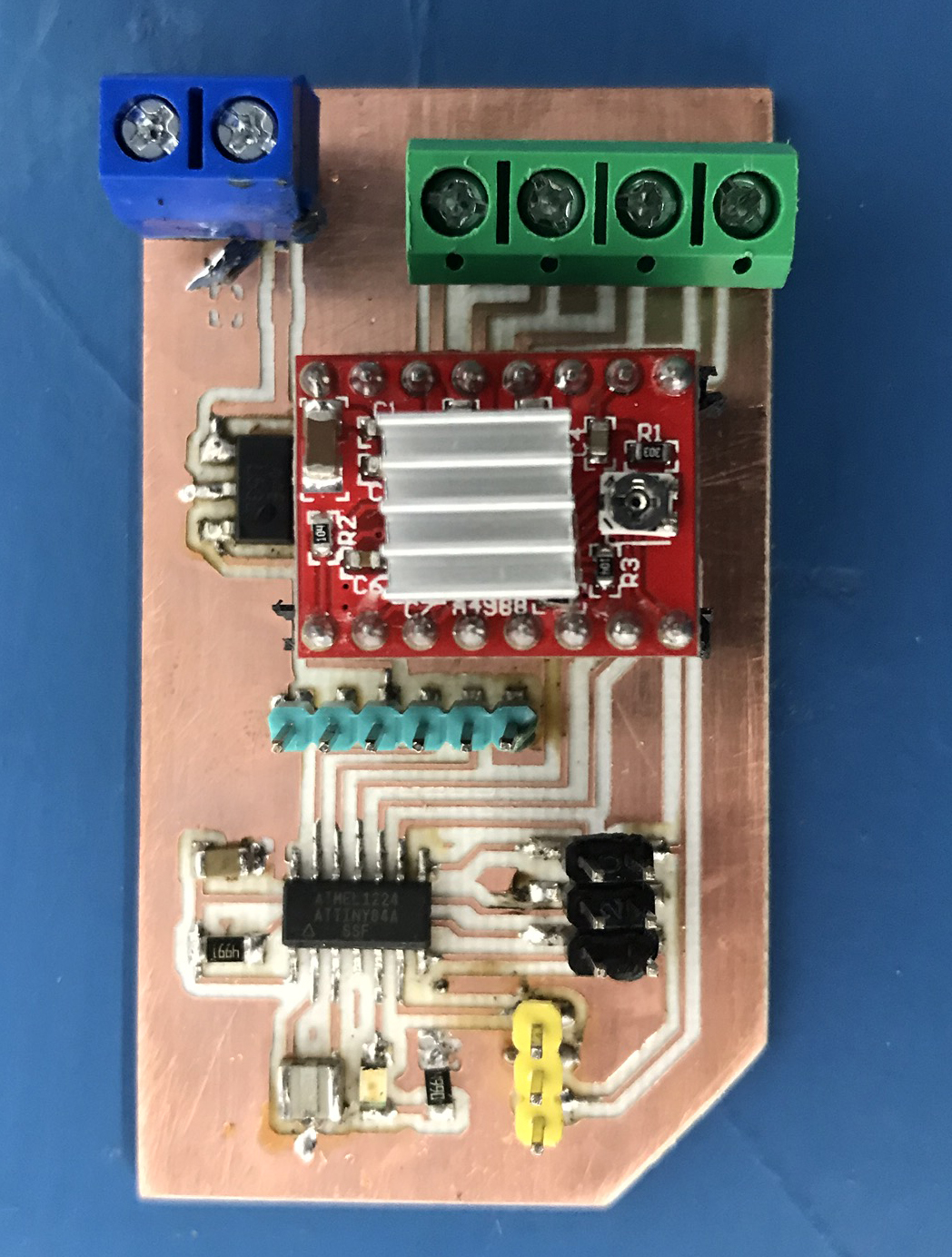
The board also has a mount for a pololu A4988 that drives the board. The regulator takes voltage from the power supply and converts it to 5V to drive the attiny.
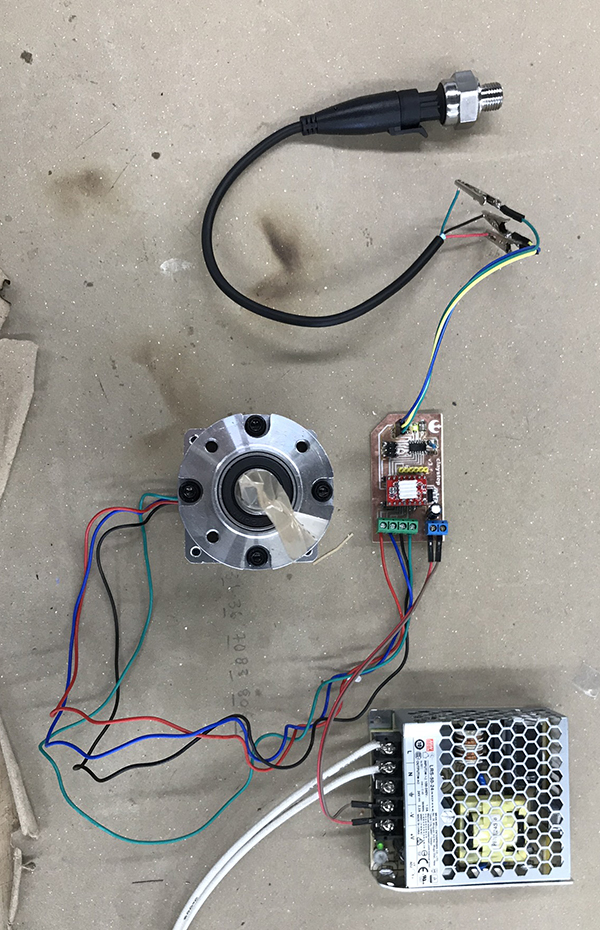
Here is all the electronics on the packaging box I made that is mounted to the kuka robot.
The final code uses the pressure sensor as a security cutoff.
Here is the Final Arduino Code:
int pulPin = 8;
int dirPin = 9;
int ledPin = 5;
int stepDelay = 700;
boolean on = false;
int sensor=A7;
int sensorValue=0;
void setup() {
Serial.begin(115200);
pinMode(ledPin, OUTPUT);
pinMode(pulPin, OUTPUT);
digitalWrite(pulPin, LOW);
}
void loop() {
while (Serial.available()) {
String cmd = Serial.readStringUntil(';');
int comma = cmd.indexOf(',');
String stepVal = cmd.substring(0, comma);
if (stepVal == "H") {
on = true;
}
else if (stepVal == "J") {
on = false;
}
String stepSpeed = cmd.substring(comma + 1, cmd.length());
int val=stepSpeed.toInt();
if (val > 1) {
stepDelay = stepSpeed.toInt();
break;
}
}
sensorValue=analogRead(sensor);
if(sensorValue>300){
on=false;
}
if (on) {
digitalWrite(pulPin, LOW);
digitalWrite(ledPin, LOW);
delayMicroseconds(stepDelay);
digitalWrite(pulPin, HIGH);
digitalWrite(ledPin, HIGH);
delayMicroseconds(stepDelay);
}
}
Chassis and construction: CNC MILLING
This is the final assembly with the tube and some of the final parts.
Plastic plunger assembly: MOLDING AND CASTING
Silicone Plunger Head by Molding and Casting.
These are the final parts.
Tube cap and new extruder design: 3D PRINTING
This is the 3d printed cap:
This new design mas better mounted on the tube.
License
I have decided to use a copyright attribution license. My project could use patents, however, I have not the resources to enforce patents, therefore, the license that most goes with my intentions is fab license:
(c) Rodrigo Shiordia 2020
This work may be reproduced, modified, distributed, performed, and displayed for any purpose, but must acknowledge "FABCLAYCRAFTER".
Copyright is retained and must be preserved.
The work is provided as is; no warranty is provided, and users accept all liability.