Input devices







//
// hello.HC-SR501.c
//
// HC-SR501 motion detector hello-world
// 9600 baud FTDI interface
//
// Neil Gershenfeld 11/16/15
// (c) Massachusetts Institute of Technology 2015
//
// This work may be reproduced, modified, distributed,
// performed, and displayed for any purpose. Copyright is
// retained and must be preserved. The work is provided
// as is; no warranty is provided, and users accept all
// liability.
//
#include
#include
#define output(directions,pin) (directions |= pin) // set port direction for output
#define set(port,pin) (port |= pin) // set port pin
#define clear(port,pin) (port &= (~pin)) // clear port pin
#define pin_test(pins,pin) (pins & pin) // test for port pin
#define bit_test(byte,bit) (byte & (1 << bit)) // test for bit set
#define bit_delay_time 102 // bit delay for 9600 with overhead
#define bit_delay() _delay_us(bit_delay_time) // RS232 bit delay
#define half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay
#define char_delay() _delay_ms(10) // char delay
#define serial_port PORTB
#define serial_direction DDRB
#define serial_pin_out (1 << PB2)
#define out_pins PINB
#define out_pin (1 << PB4)
void put_char(volatile unsigned char *port, unsigned char pin, char txchar) {
//
// send character in txchar on port pin
// assumes line driver (inverts bits)
//
// start bit
//
clear(*port,pin);
bit_delay();
//
// unrolled loop to write data bits
//
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
//
// stop bit
//
set(*port,pin);
bit_delay();
//
// char delay
//
bit_delay();
}
int main(void) {
//
// main
//
// set clock divider to /1
//
CLKPR = (1 << CLKPCE);
CLKPR = (0 << CLKPS3) | (0 << CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0);
//
// initialize serial pin
//
set(serial_port,serial_pin_out);
output(serial_direction,serial_pin_out);
//
// main loop
//
while (1) {
//
// wait for output high
//
while ((out_pins & out_pin) == 0)
;
put_char(&serial_port,serial_pin_out,'1');
//
// wait for output low
//
while ((out_pins & out_pin) != 0)
;
put_char(&serial_port,serial_pin_out,'0');
}
}

sudo make -f hello.ping_sensor.make program-avrisp2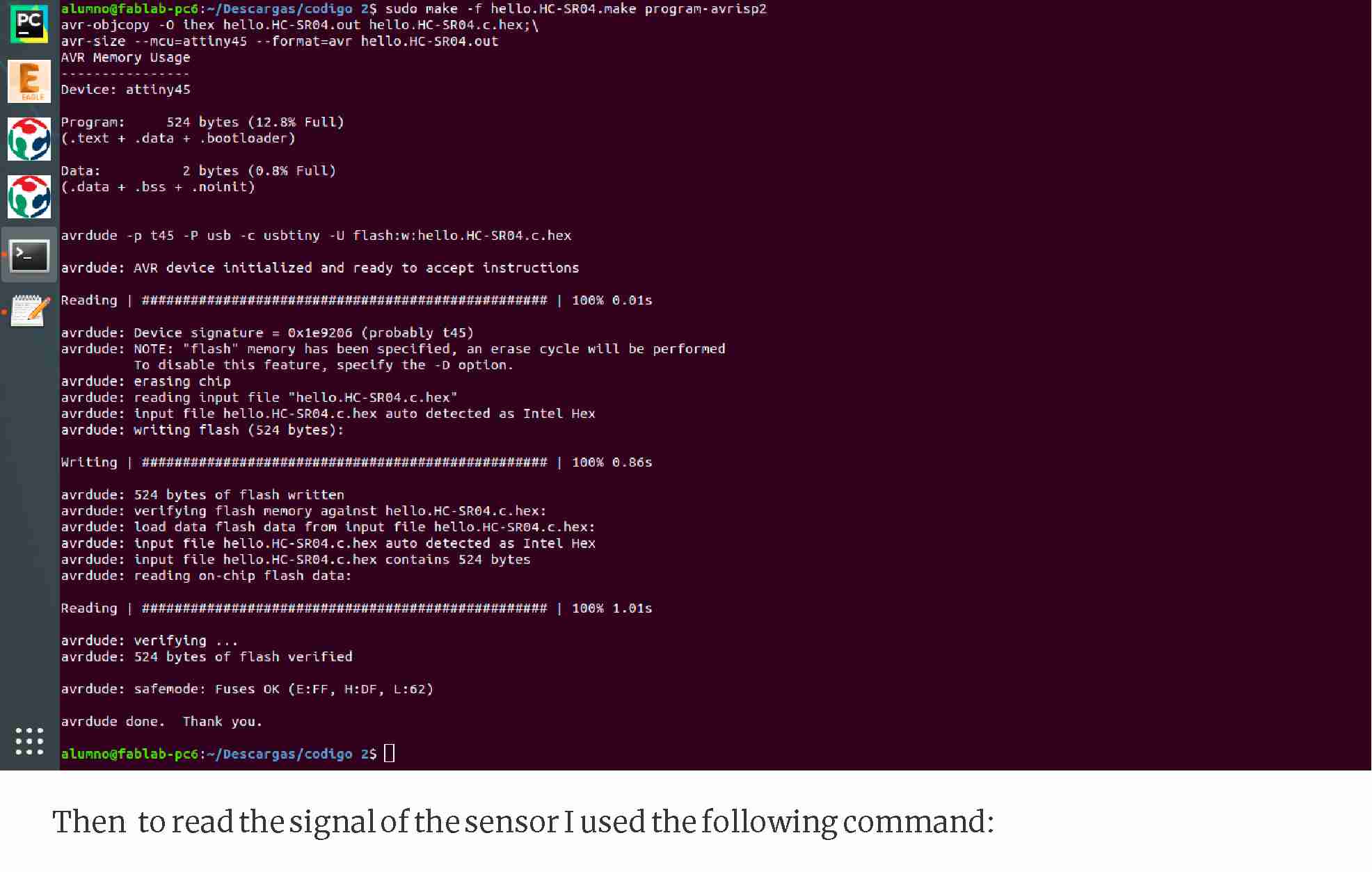
python hello.HC-SR04.py /dev/ttyUSB0 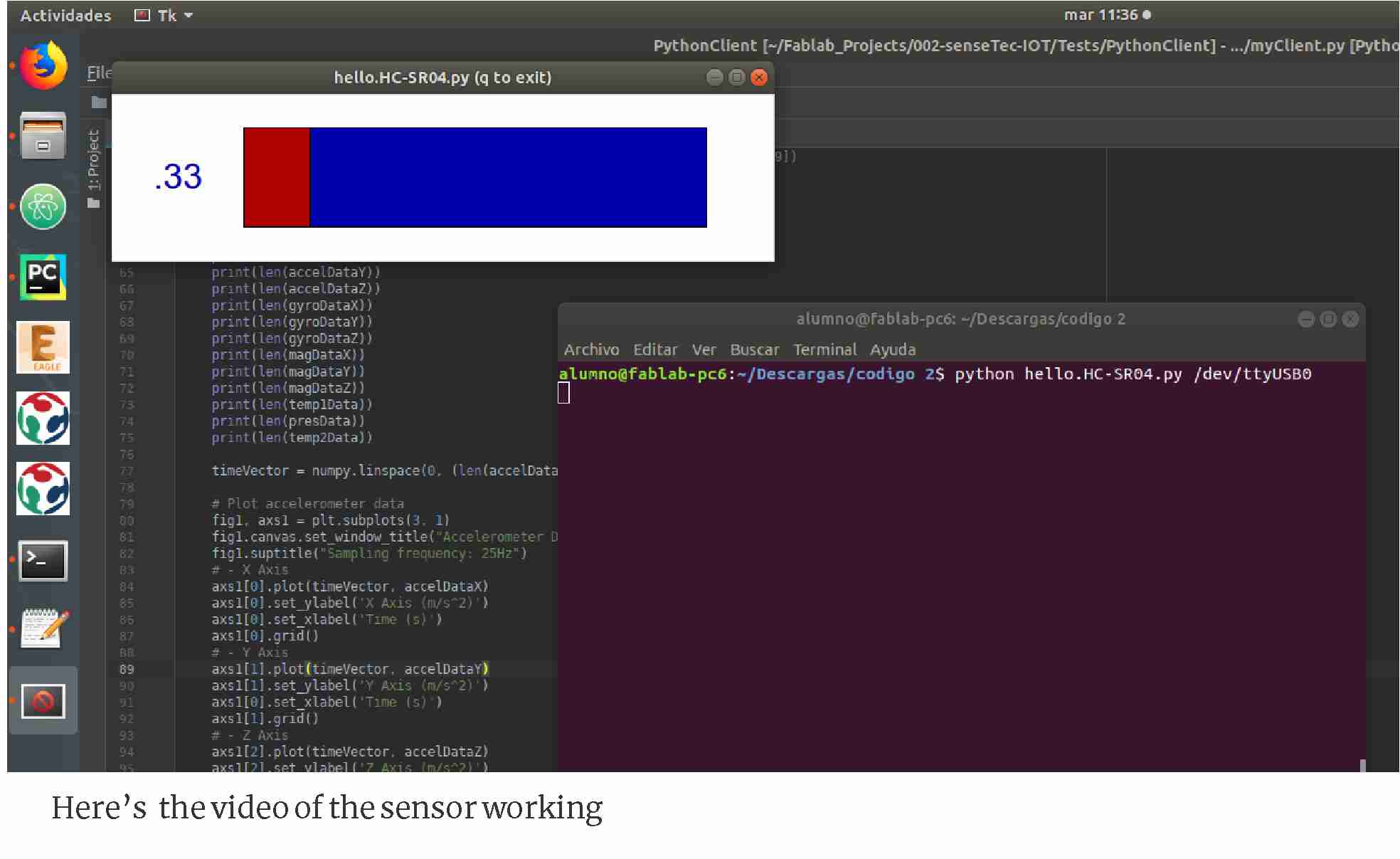
Testing ultrasonic sensor-Silvia Lugo from Silvia Lugo on Vimeo.