17.1. Group assignment
For this assignment we developed the mechanism we worked on 2 weeks ago.
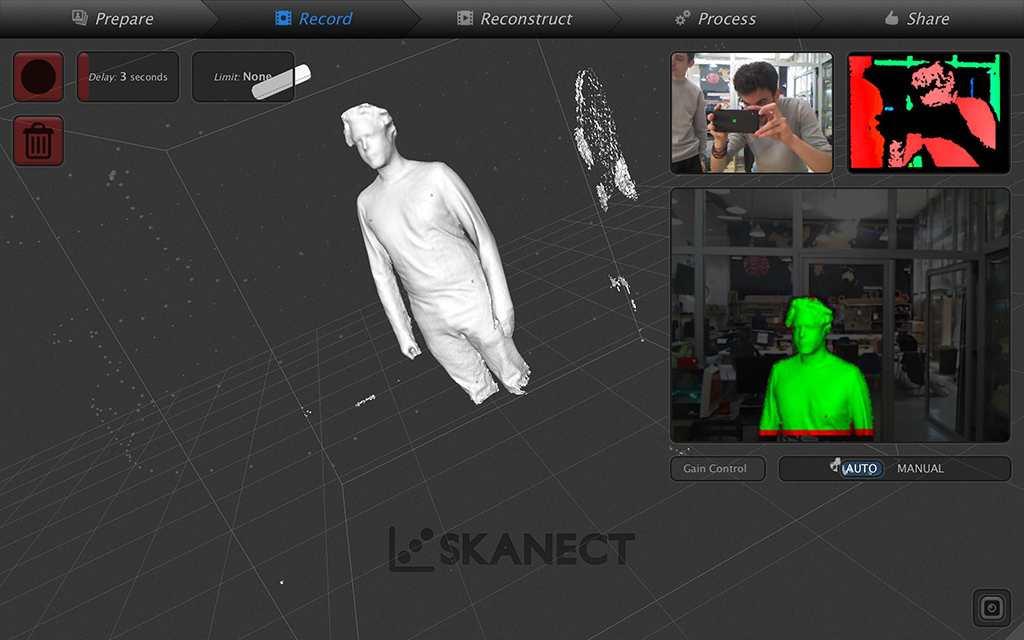
The machine we designed and made is an automatic 3D full-body scanner using a Kinect cam and a simple interface software to control it.
This video shows the working process and how it is used:
And here you can see the final scanning results:
We devided the group into 3 couples to focus on each part of the project:
- Rotatory base (with mechanism) done by Diar and Gustavo.
- Sliding clamp, by Josep and Juan Carlos.
- Vertical structure, by Felipe and me.
The groupal documentation is explained on this group page.
So on the following lines I will explain the part I developed more deeply.
17.2. Vertical Structure
This is a short video that shows the final result of the part we designed.
17.2.1. Structure design
For the vertical structural part, Felipe and I worked on the design and mechanism production of this sliding pole, through which the Kinect camera will run to scan in many vertical positions.
This maker beam construction set shown below, gave us ideas to build a self-supporting structure, easy to adjust and adapt to the different mechanisms. It should be a light, strong structure, with standarized measurements, to add different components such as bearings, belts, nuts and so.


Material used:
- 20x20mm (X) 1 meter aluminum profile (x2)
- 3D printed endstop-joints
- 16mm plywood wooden base (D40cm)
- M4 screw-washer-nut set (x8)
- 2m belt (5mm)
- Ziptie (x4)
The structure will be made of two aluminum profiles, fastened together, and joint in upper and lower ends with 3d printed PLA fixed joints that will clamp the belt tight from both places so that the clamp can slide smoothly through it.
17.2.2. Joints design
Before starting designing the pieces, we kept in mind the measurements Josep and Juan Carlos used for the clamp mechanism, simply to know the exact distance between the belt (determined by the clamp's bearings position) and the rail.
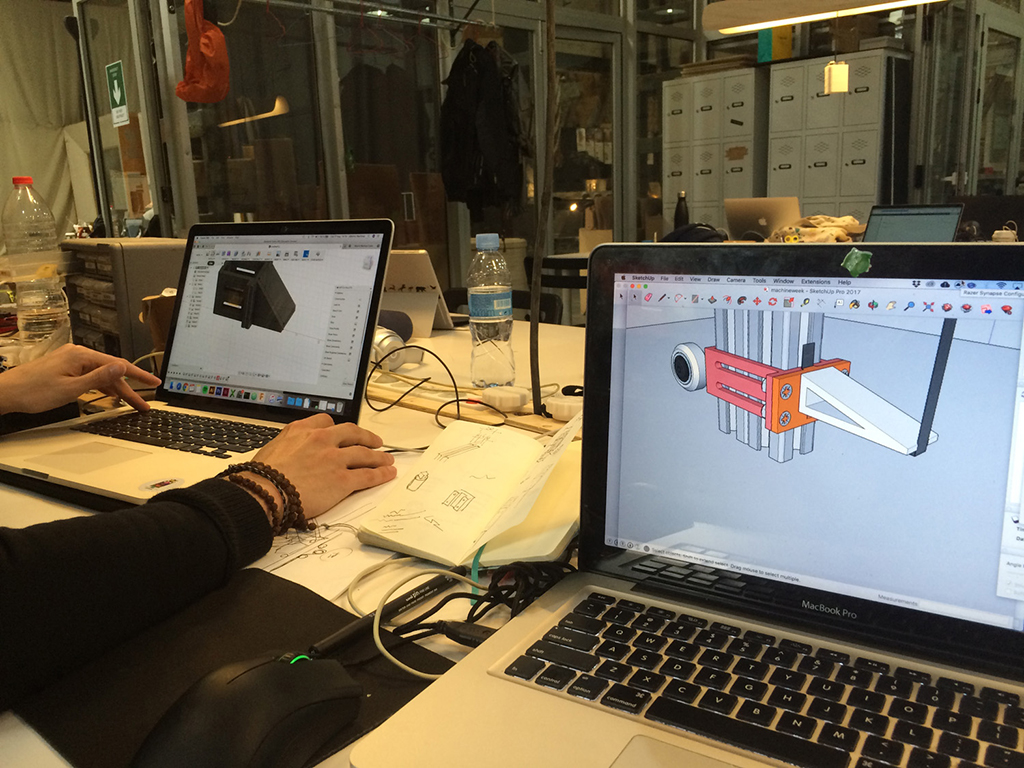
For the joints' design we used Fusion360 as a CAD software to create the pieces, and then created the correspondent .stl files for later 3d printing. We decided to break the joints in two, to use it as a fastener to grab the belt between both parts. To ensure the closing M4 screws will be needed, so we keep in mind their location in the printing design.
17.2.3. Mechanism testing
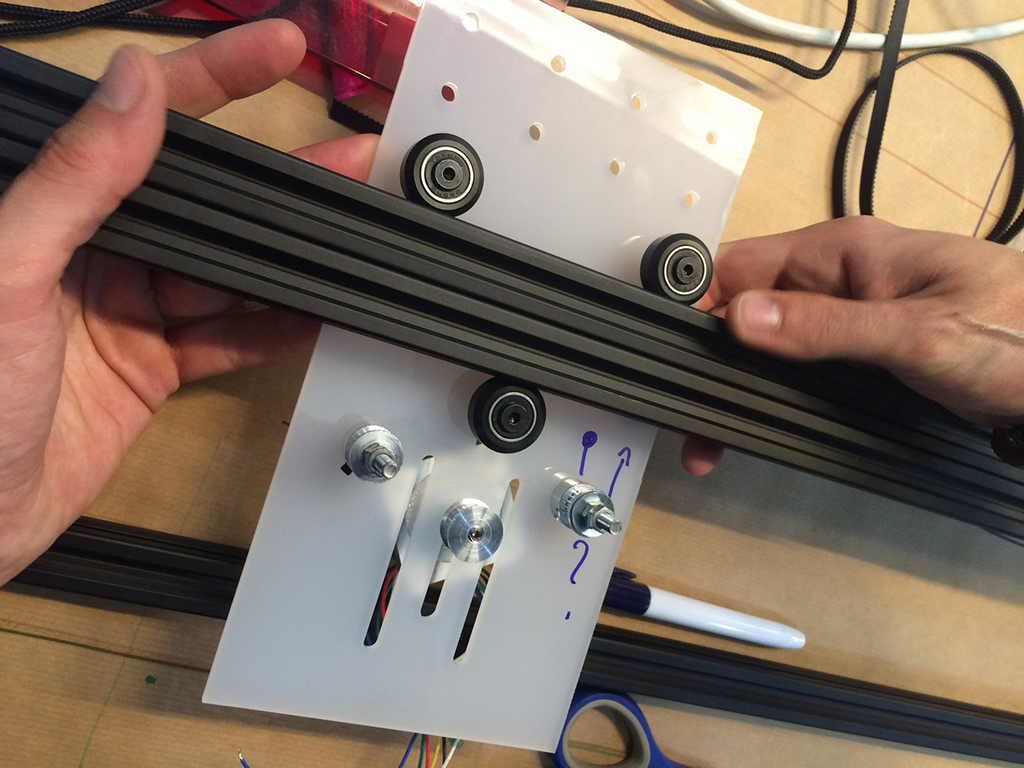
First we tried different sliding joints to test grid, friction, material strenght, etc.
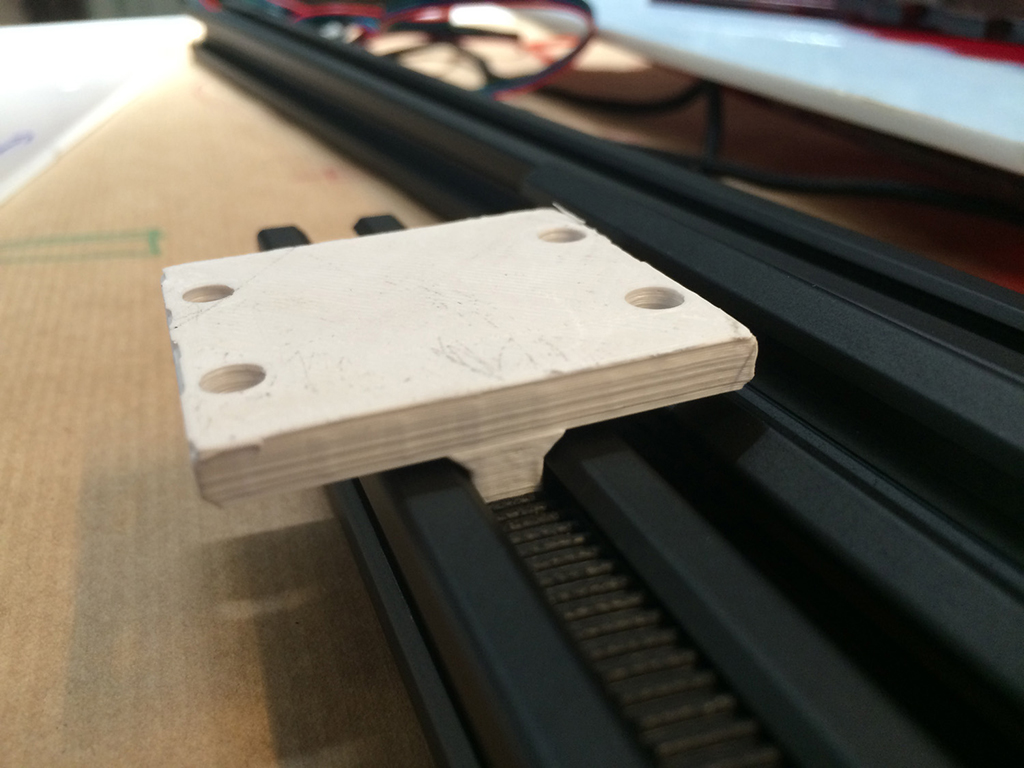
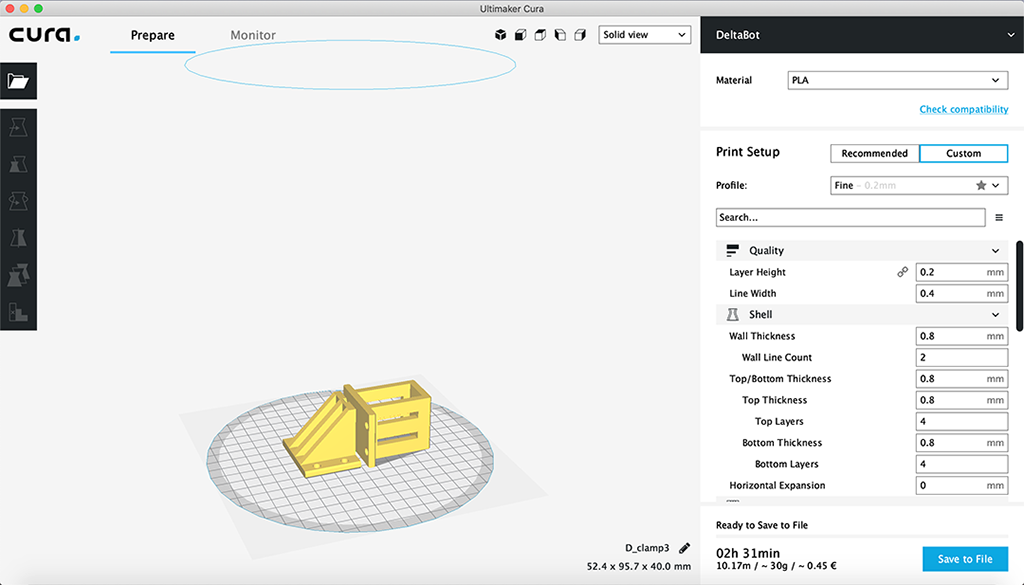
After getting the final design, we created the printing file in Cura, with the right settings to print it in PLA with the Anycubic delta printer.
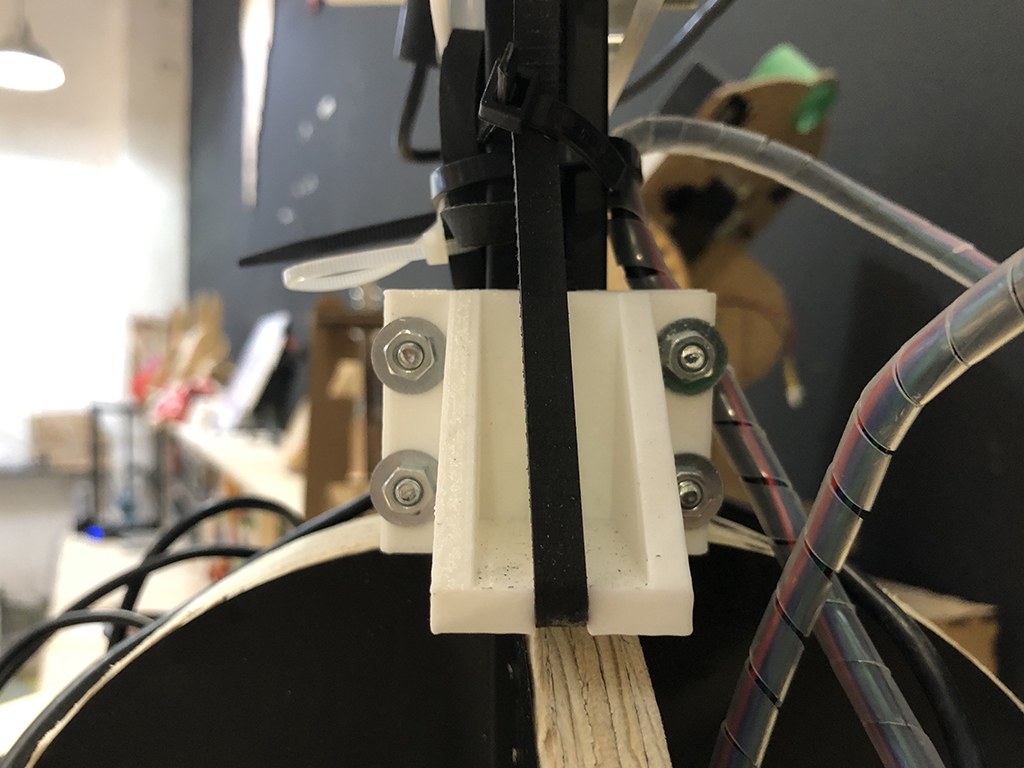
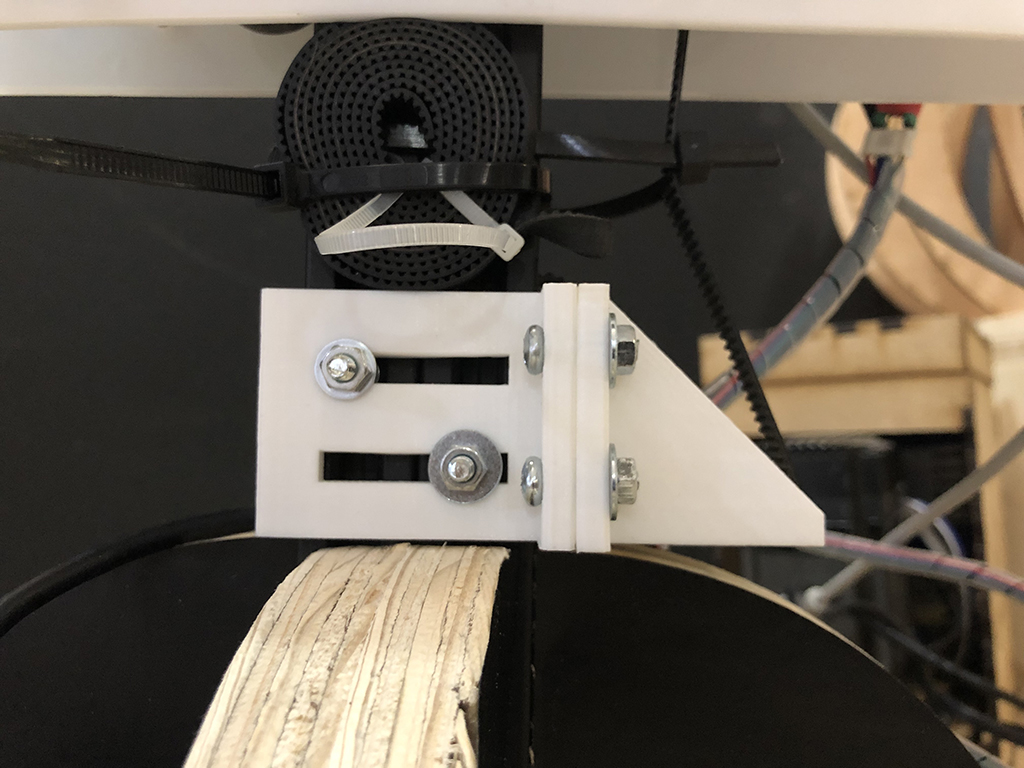
Here you can see the assembly of the fixing joints into the structure. A pair of zipties will help to rectify the belt's tension and distance so that the motor will not make any extra effort to slide through a deflected way.
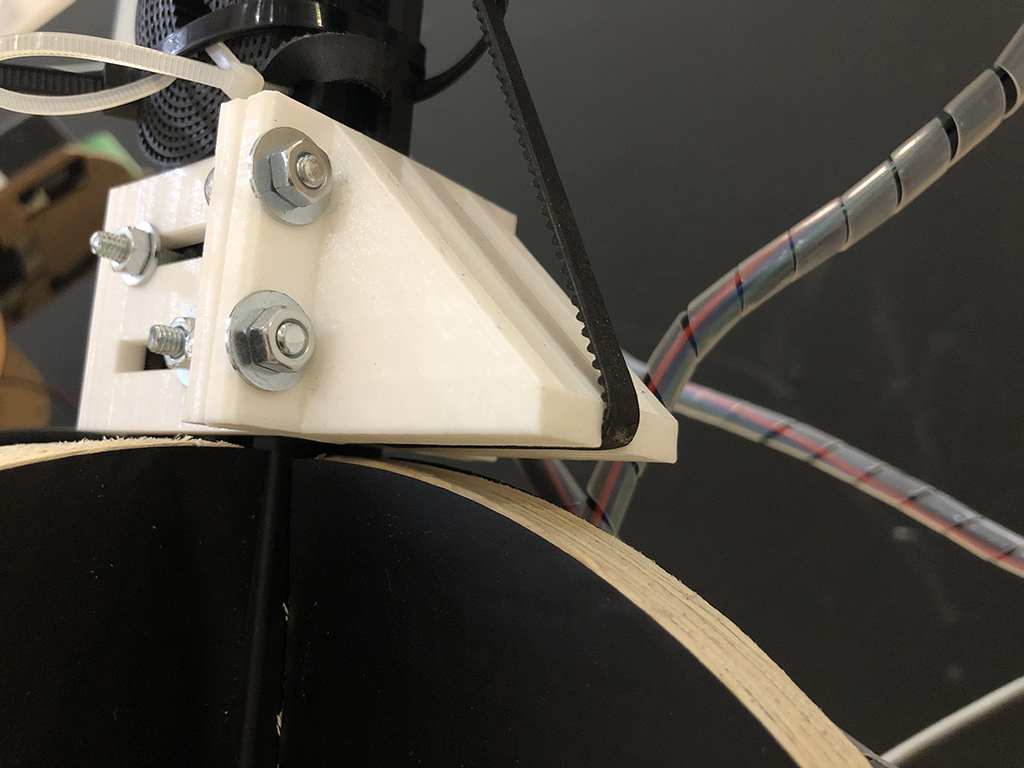
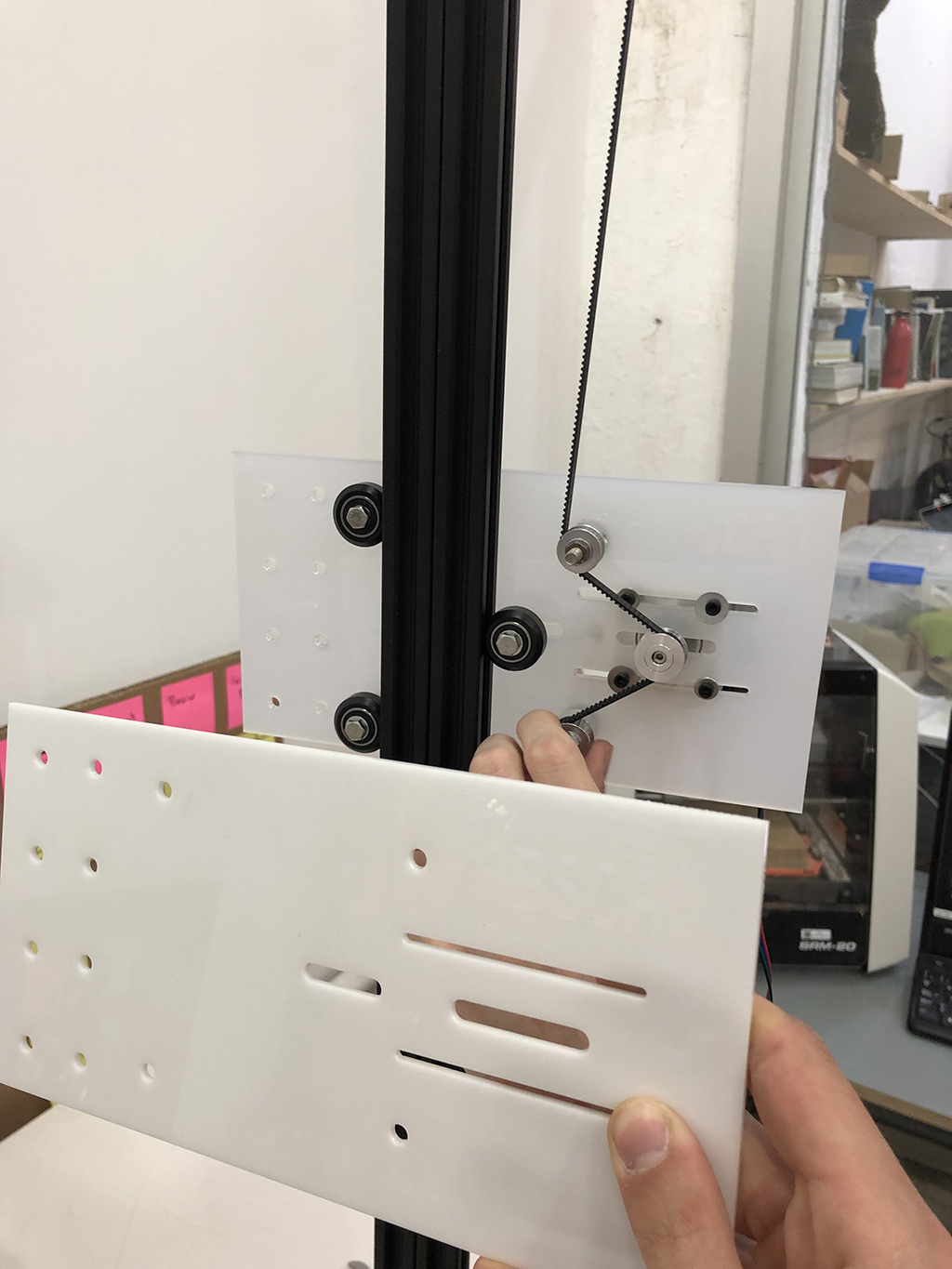
Then we also designed the counter plate to attatch the kinect or any future scanning device parallel to the sliding mechanism. This part is essential as it will counteract the forward and side bending (due to engine's weight and movement), so this new plate will make the sliding mechanism cover:
And here there is the final result of the vertical mechanism assembled:
