What is an Input Device?
An input device is an equipment/Component used to provide data and control signals to an information processing system such as a Micro Controller. Examples of input devices include Sensors, Cameras etc.
Sensors & Transducers
A sensor is a transducer whose purpose is to detect some characteristic of its environments. It detects events or changes in quantities and provides a corresponding output, generally as an electrical or optical signal. Transducers are measurement devices used to change one kind of energy to another. Energy may include electrical, mechanical, electromagnetic, chemical, acoustic, and thermal energy
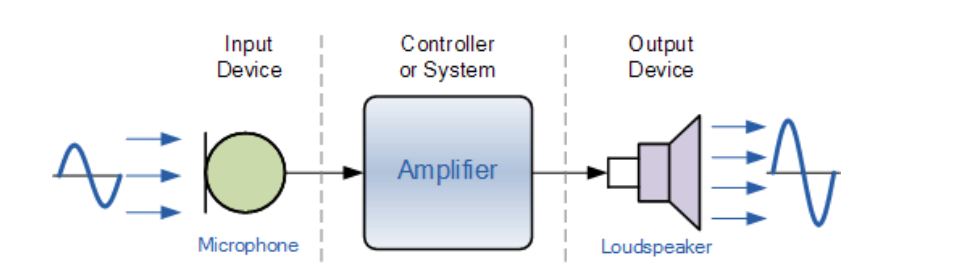
Devices which perform an "Input" function are commonly called Sensors because they "sense" a physical change in some characteristic that changes in response to some excitation, for example, heat or force and convert that into an electrical signal. Devices which perform an "Output" function are generally called Actuators and are used to control some external device, for example, movement or sound.
Analogue and Digital Sensors
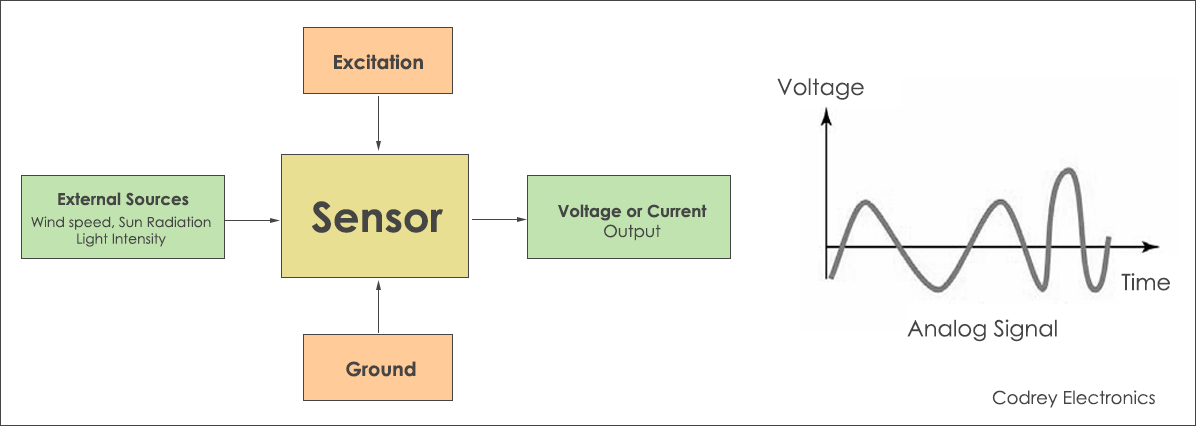
Analogue Sensors
Analog Sensors produce a continuous output signal or voltage which is generally proportional to the quantity being measured. Physical quantities such as Temperature, Speed, Pressure, Displacement, Strain etc are all analog quantities as they tend to be continuous in nature. For example, the temperature of a liquid can be measured using a thermometer or thermocouple which continuously responds to temperature changes as the liquid is heated up or cooled down.
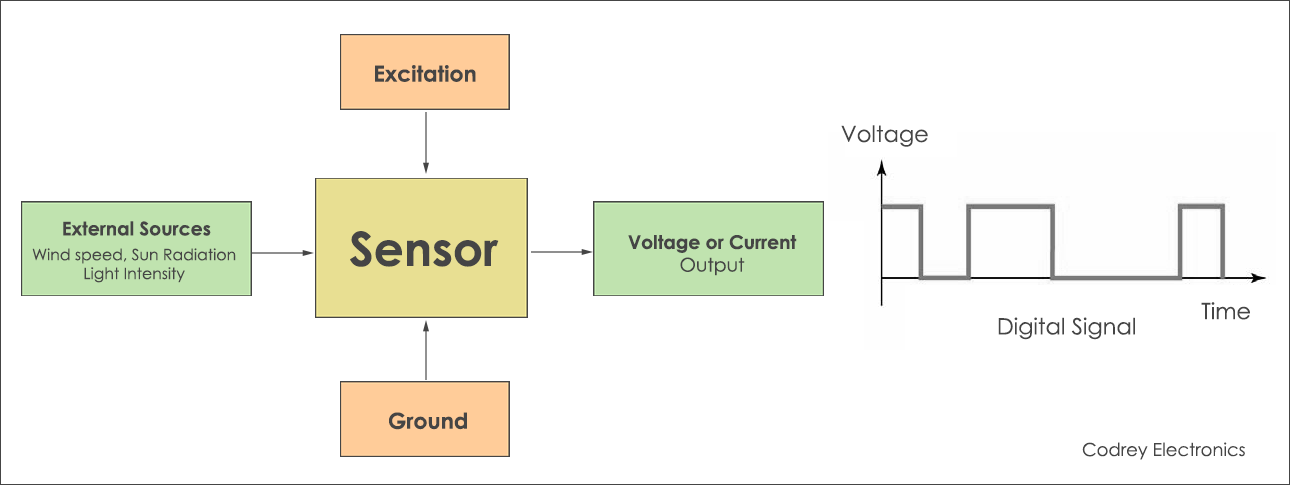
Digital Sensors
As its name implies, Digital Sensors produce a discrete digital output signals or voltages that are a digital representation of the quantity being measured. Digital sensors produce a Binary output signal in the form of a logic “1” or a logic “0”, (“ON” or “OFF”). This means then that a digital signal only produces discrete (non-continuous) values which may be outputted as a single “bit”, (serial transmission) or by combining the bits to produce a single “byte” output (parallel transmission).
Source www.codrey.com/electronics/different-types-of-sensors
Sensors/Input Devices from my Learning-
What a sensor basically does is, it takes the physical change or mesures the physical change and convert that change into some voltage, that voltage undergoes some changes like may be it can be amplified or may be not,
After that there is some mathematical relation, the voltage values are raw it's not a data its fed into some function whose output is the valuable data that we the user actually want from the sensor.
How it's performed
There are various libraries for various sensors, the libraries are nothing but some line of codes which include some fucntions, from which we call those predefined functions to make our main code easy and simple. The library files mostly includes all the conversion formula from which we get the output data from the sensor.

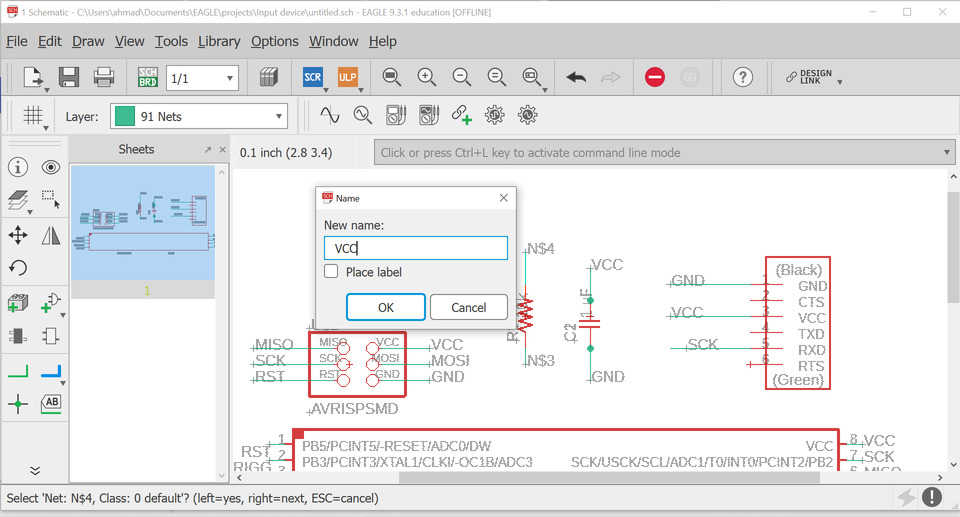
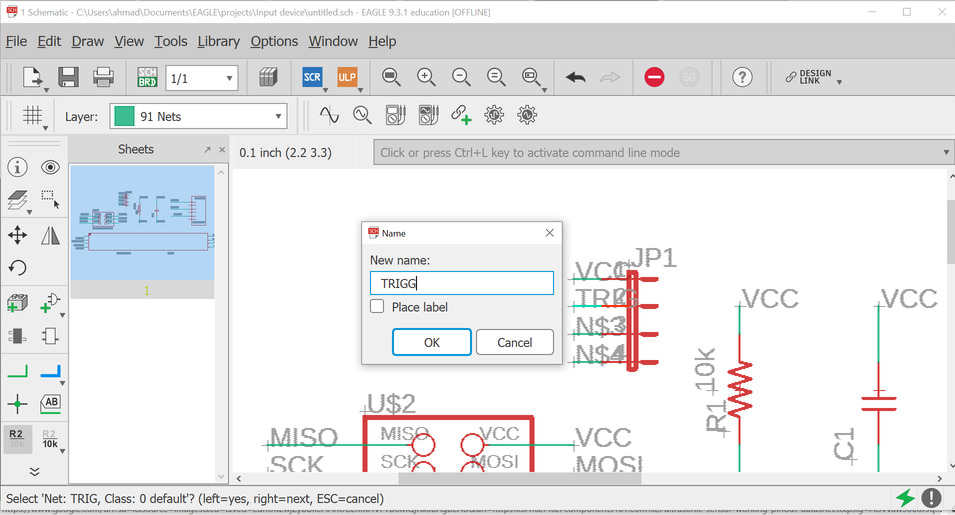
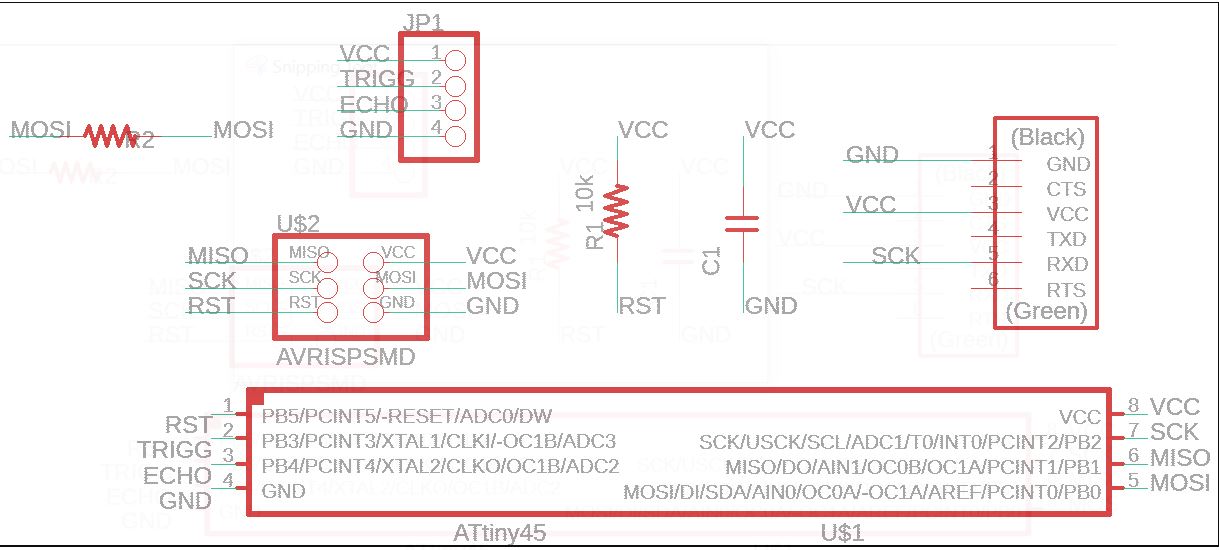 The final schematic
The final schematic
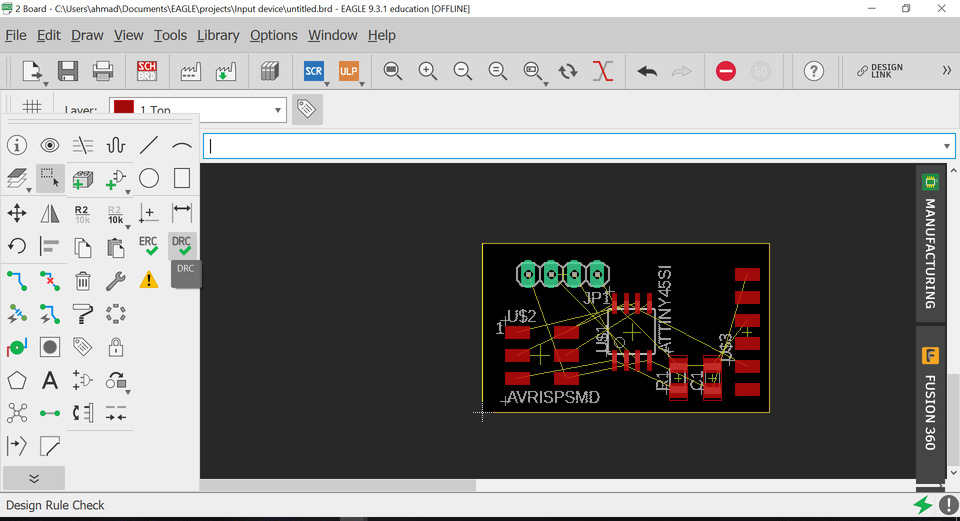
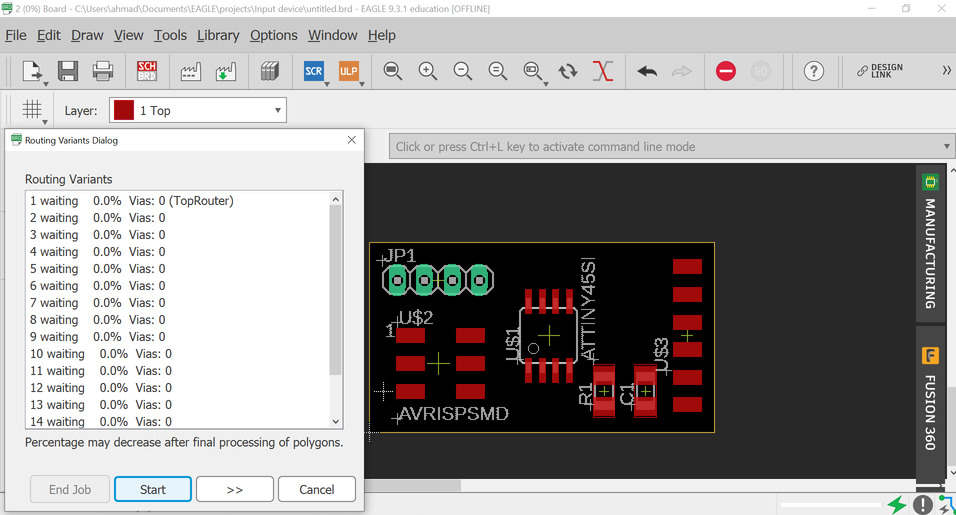
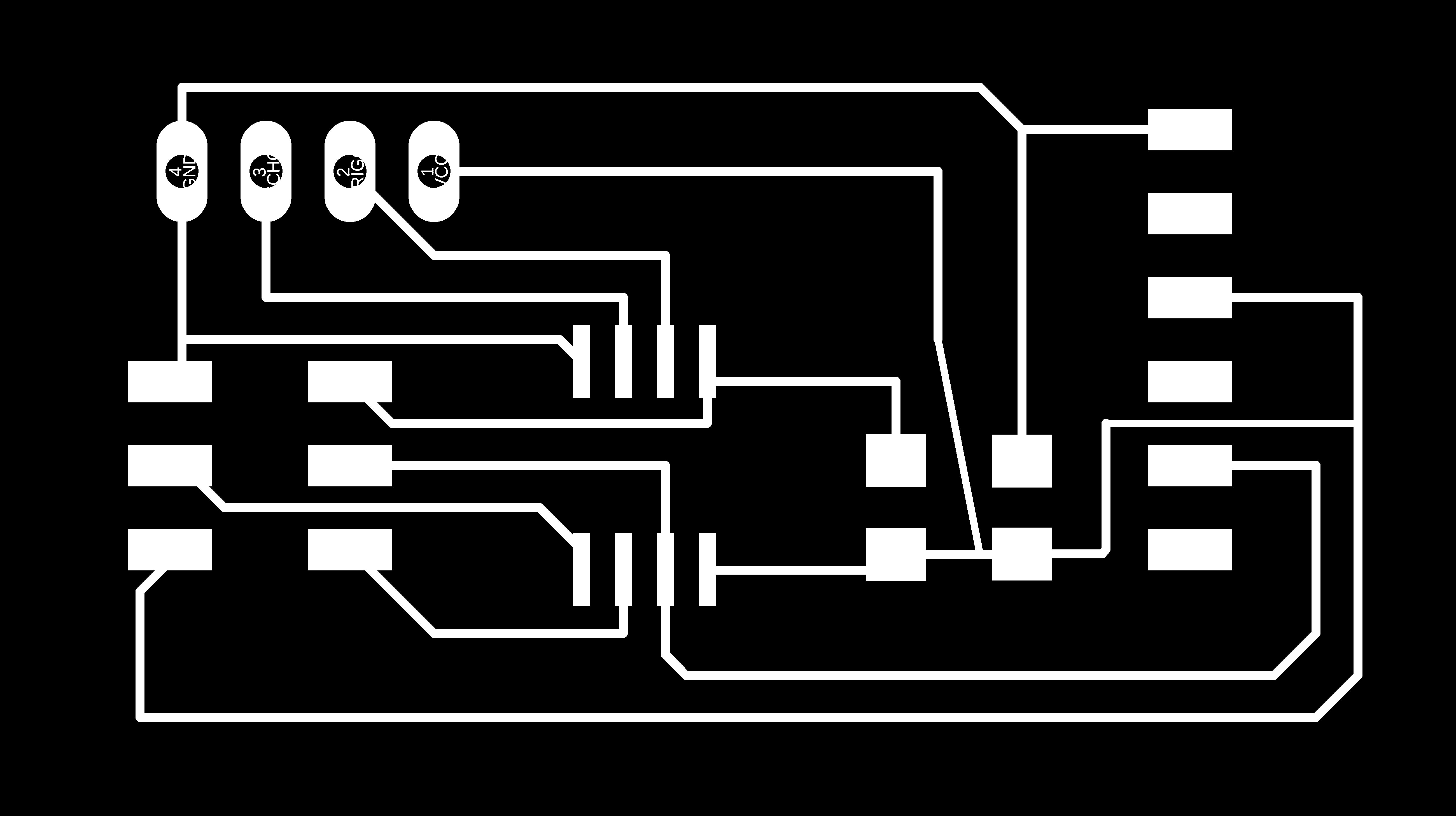
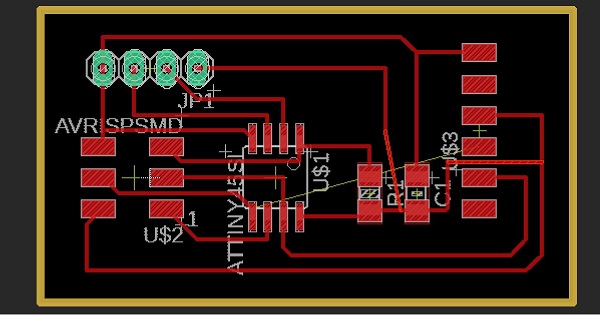 The final Board layout
The final Board layout
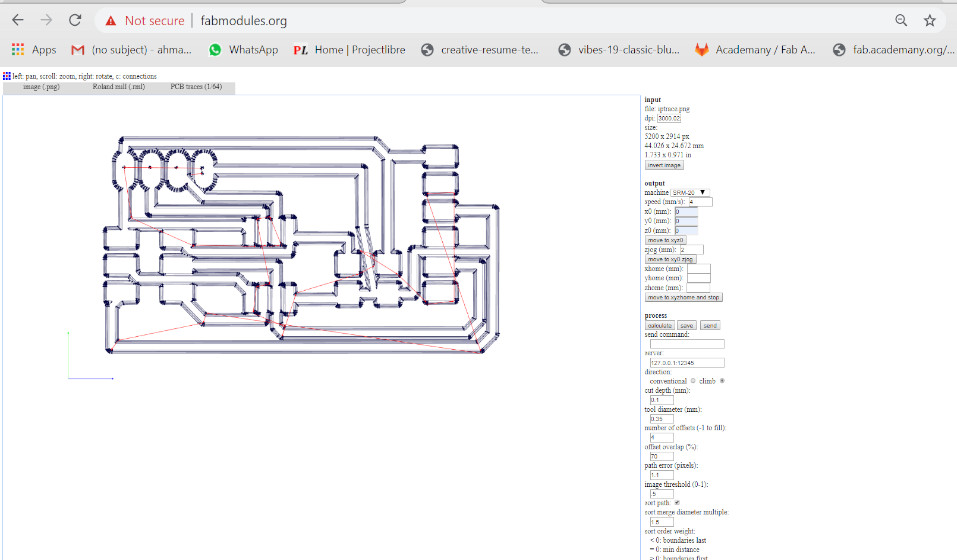
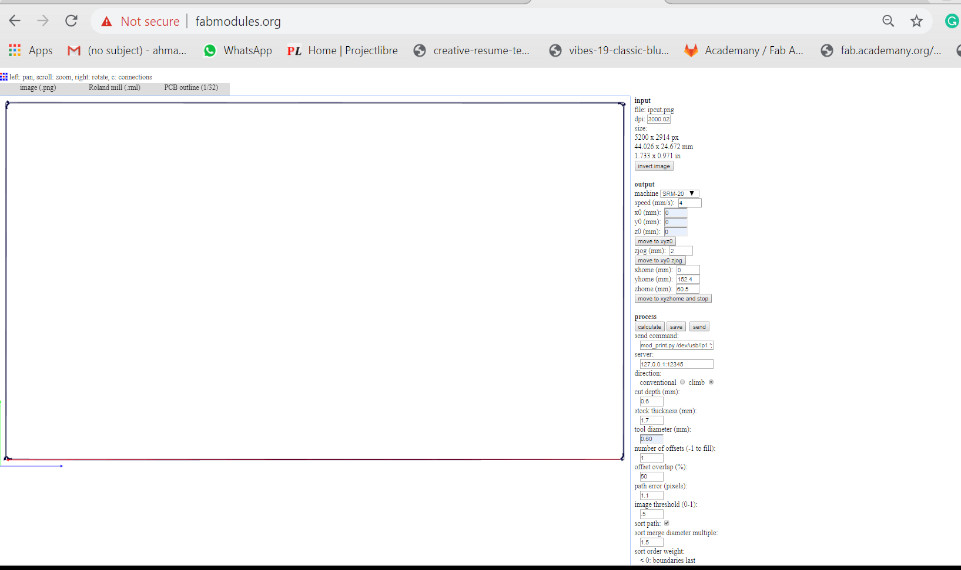
.png)


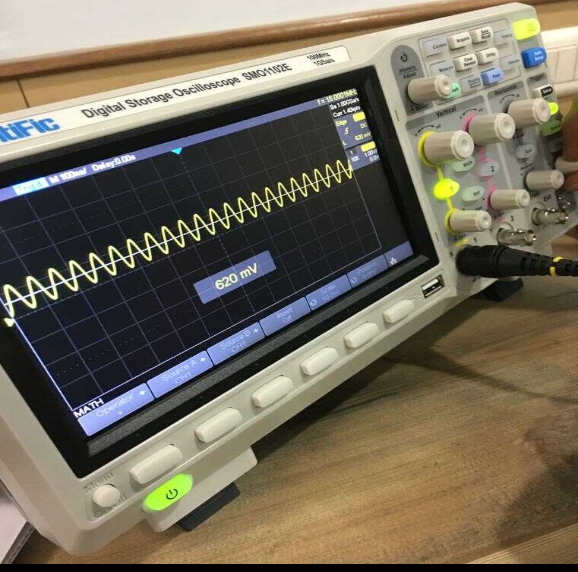 we tested out the crystal on an Arduino UNO, we connected the probes to the crystal of Ardunio Uno which showed a frequency of 16 MHz.
we tested out the crystal on an Arduino UNO, we connected the probes to the crystal of Ardunio Uno which showed a frequency of 16 MHz.
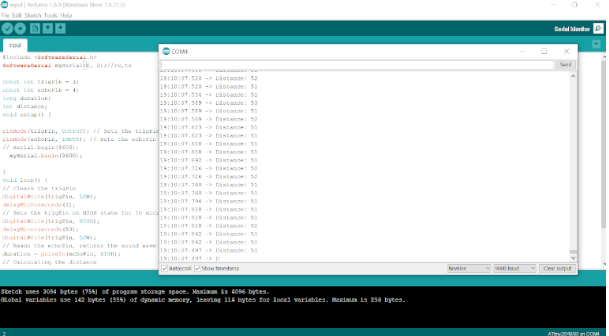
 We then uploaded Blink code on the UNO board and we observed the pulse signal.
We then uploaded Blink code on the UNO board and we observed the pulse signal.
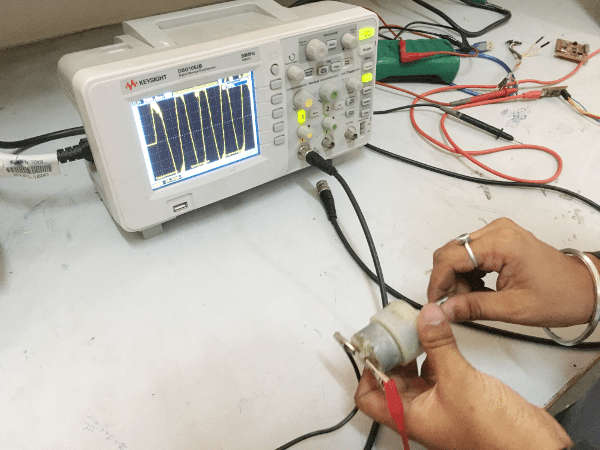 For measuring the analog signals, We connected both the terminals for the motors with the probes of the DSO and then we rotated the motor shaft manually.
For measuring the analog signals, We connected both the terminals for the motors with the probes of the DSO and then we rotated the motor shaft manually.