THOUSAND CRANES
Thousand Origami Cranes (千羽鶴) is a group of one thousand origami paper cranes (折鶴) held together by strings. An ancient Japanese legend promises that anyone who folds a thousand origami cranes will be granted a wish - such as a long life or recovery from illness or injury - by a crane.
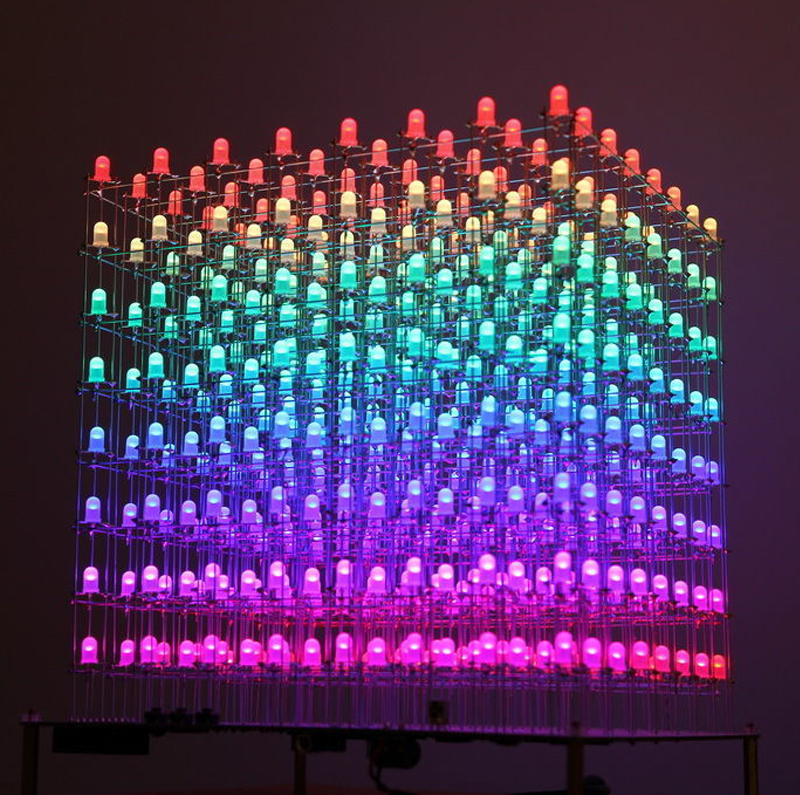
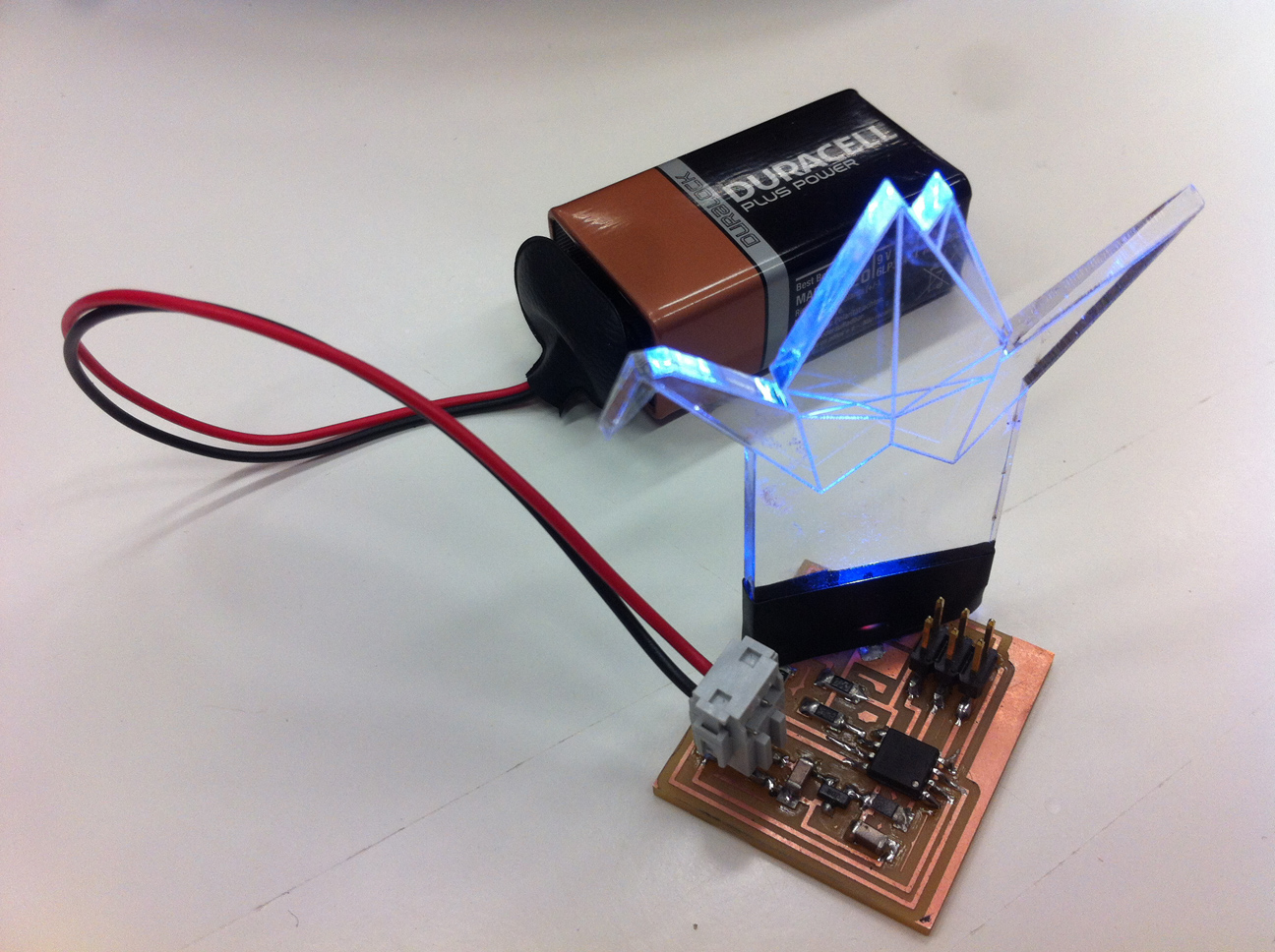
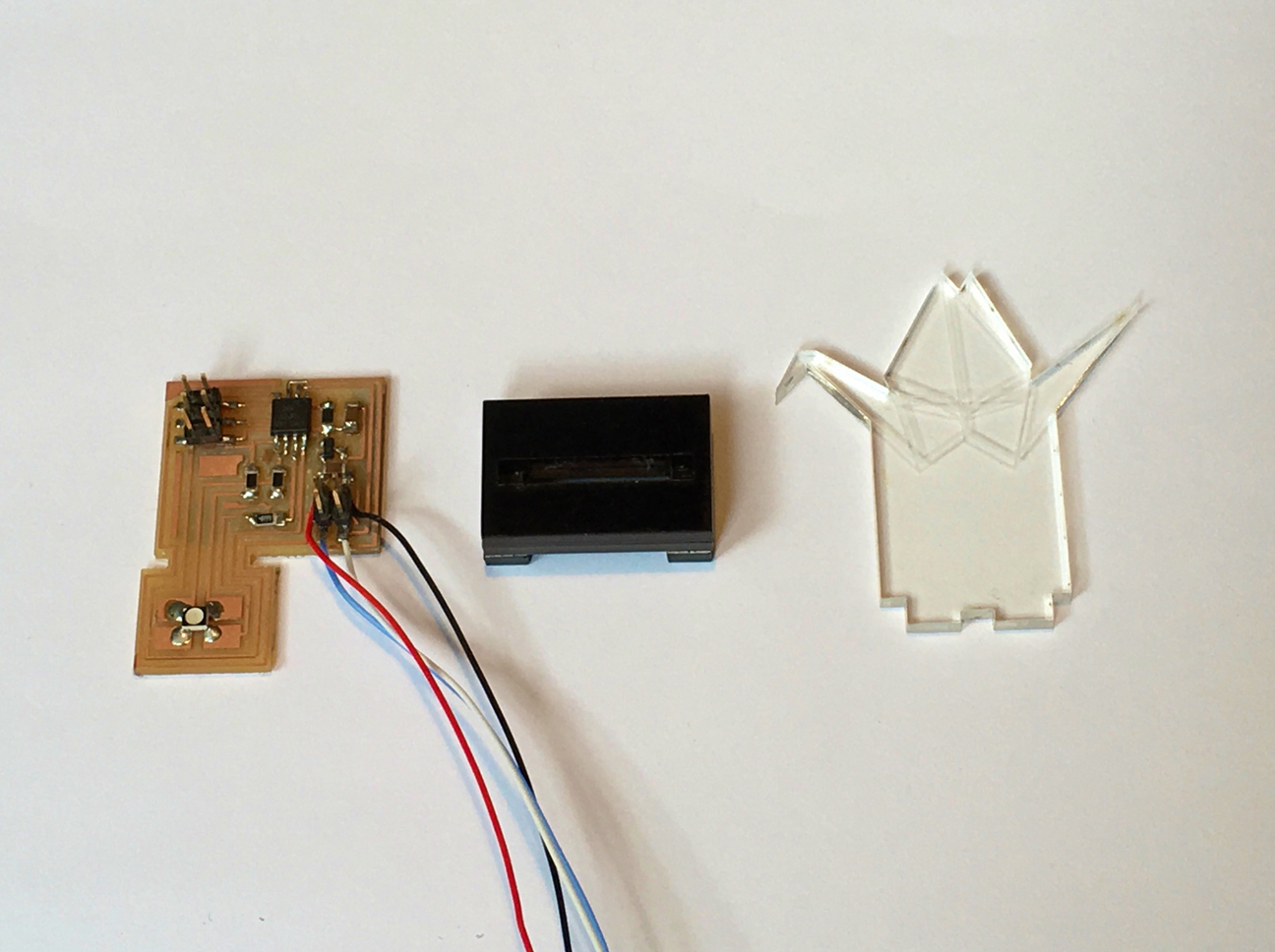
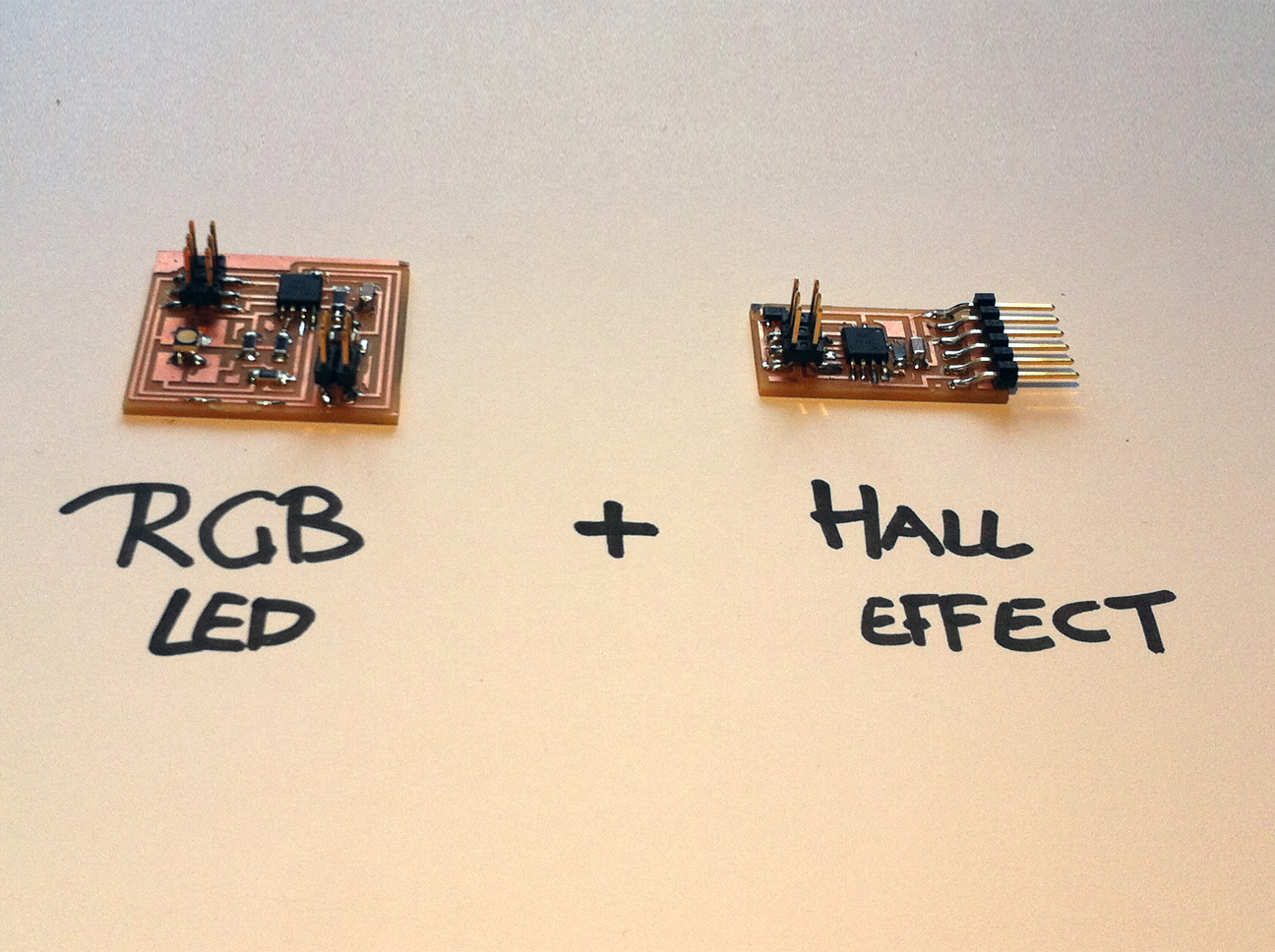
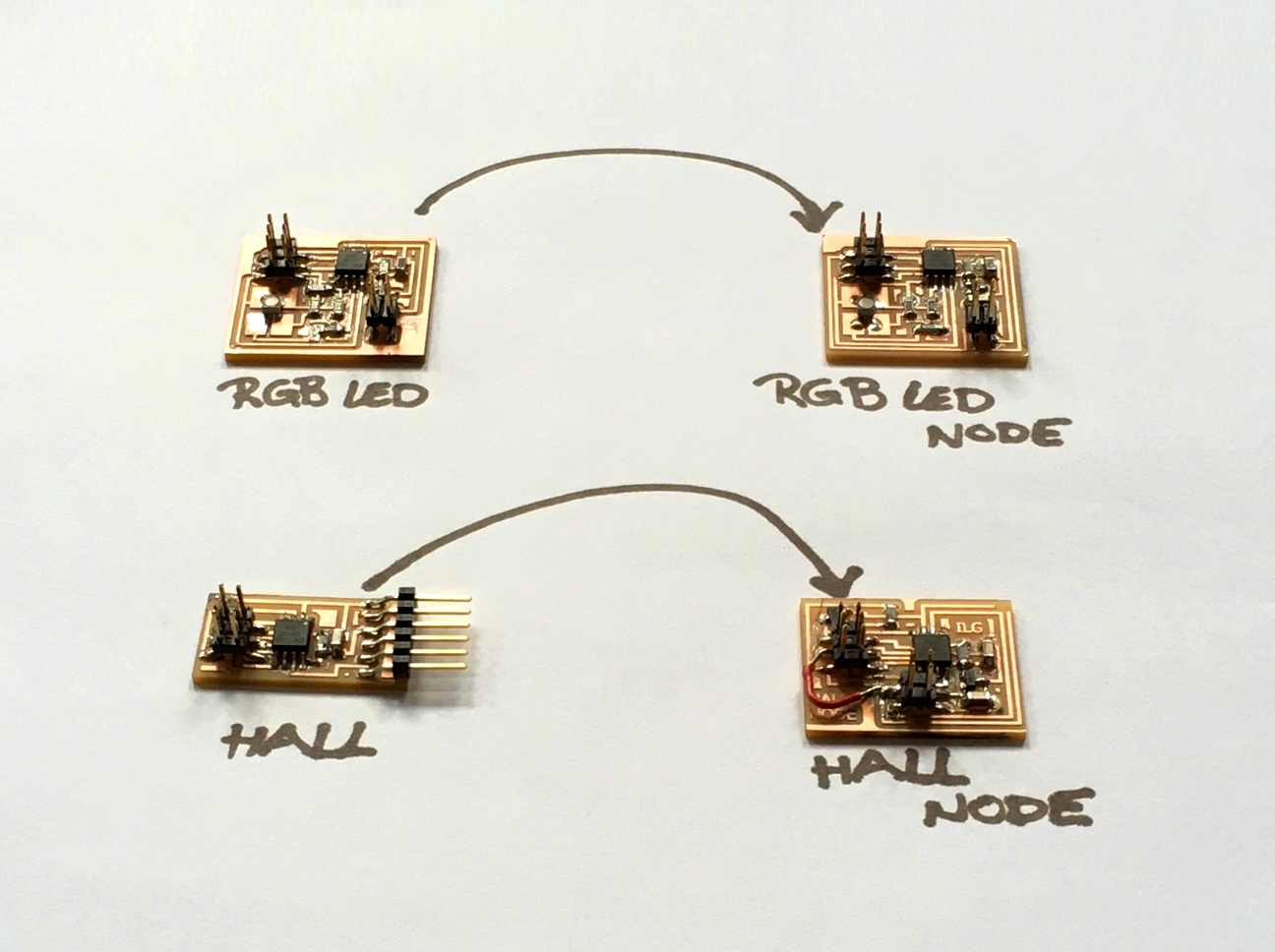
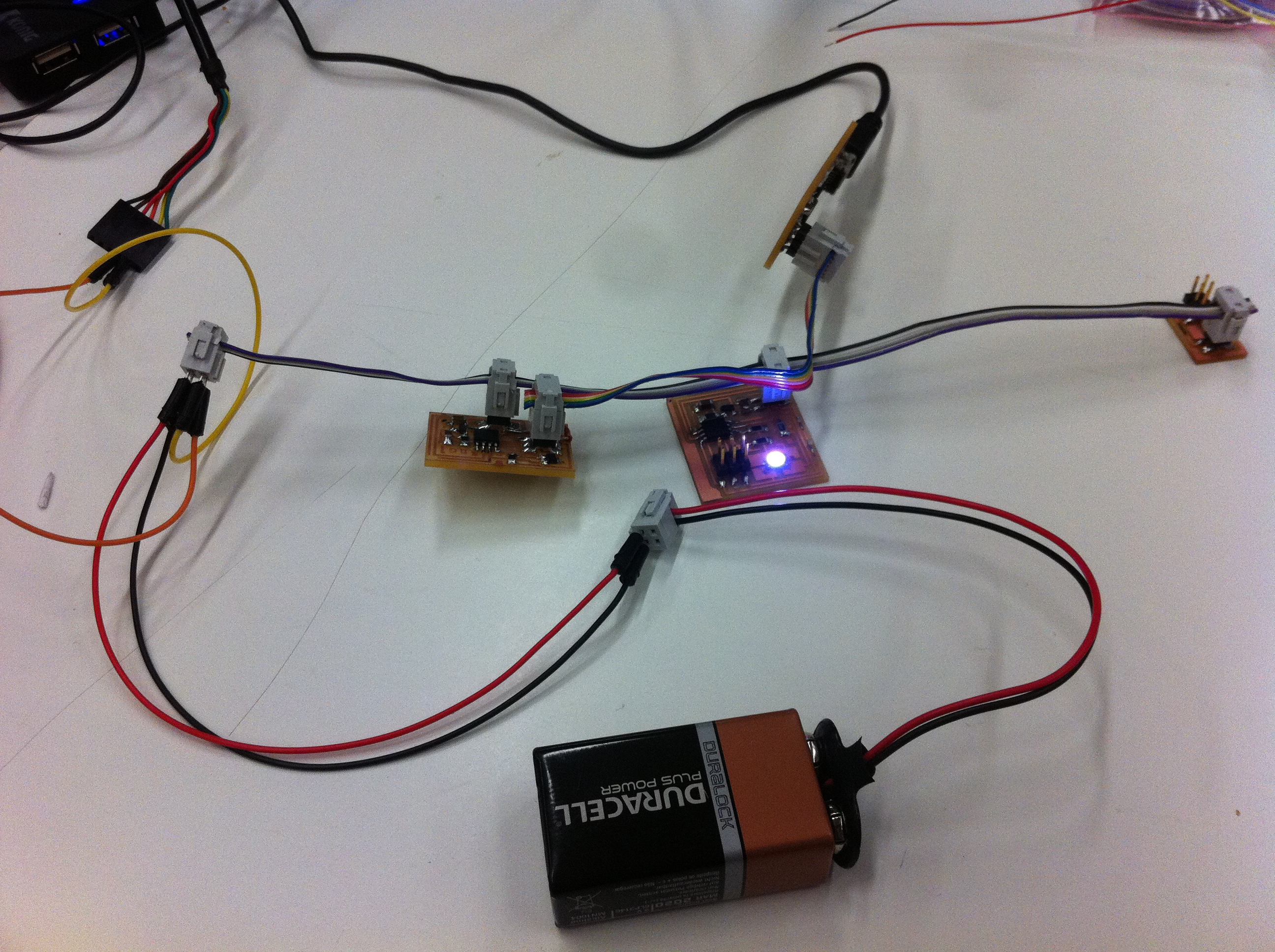
THOUSAND SHADES OF LEDs
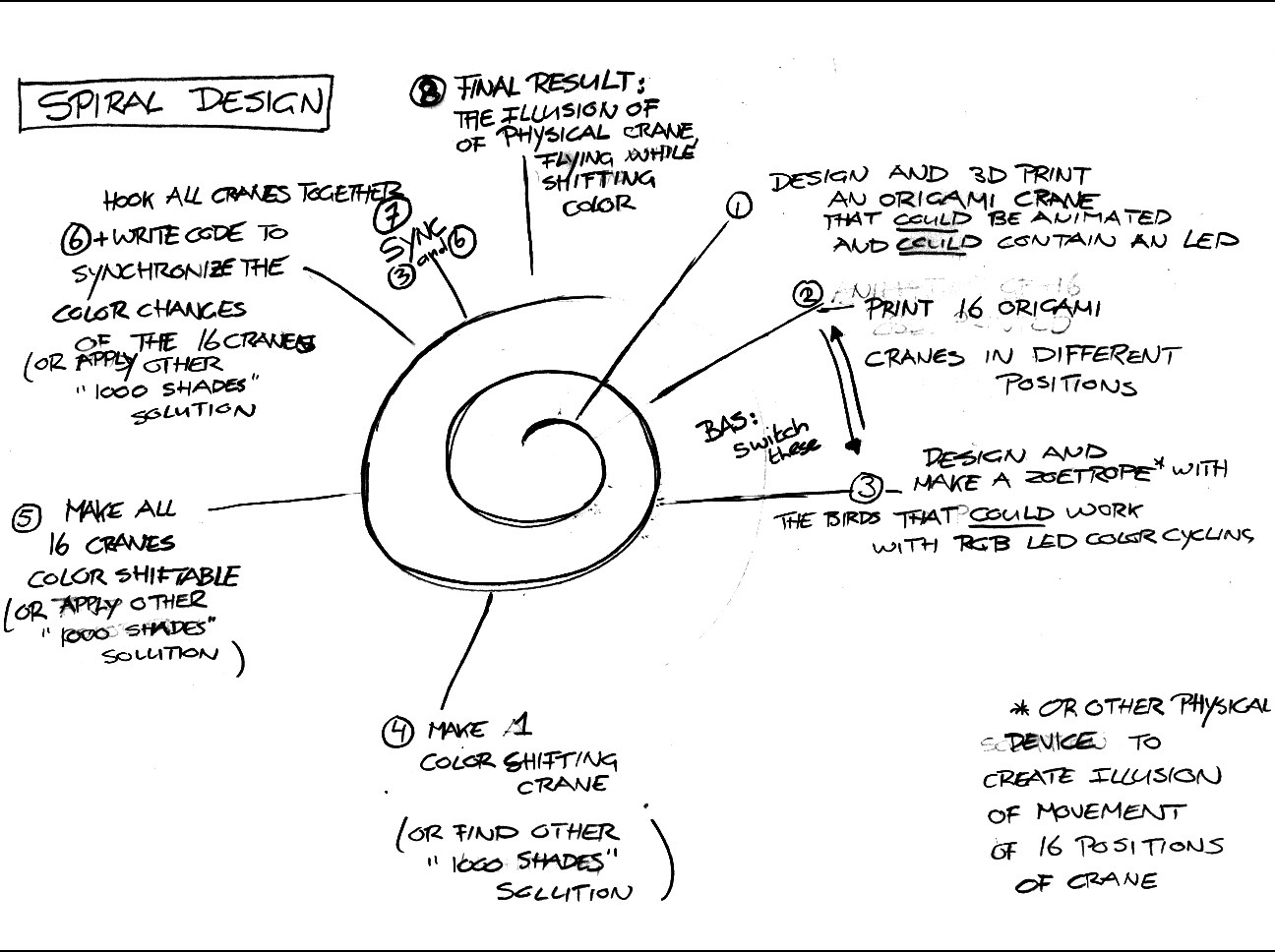
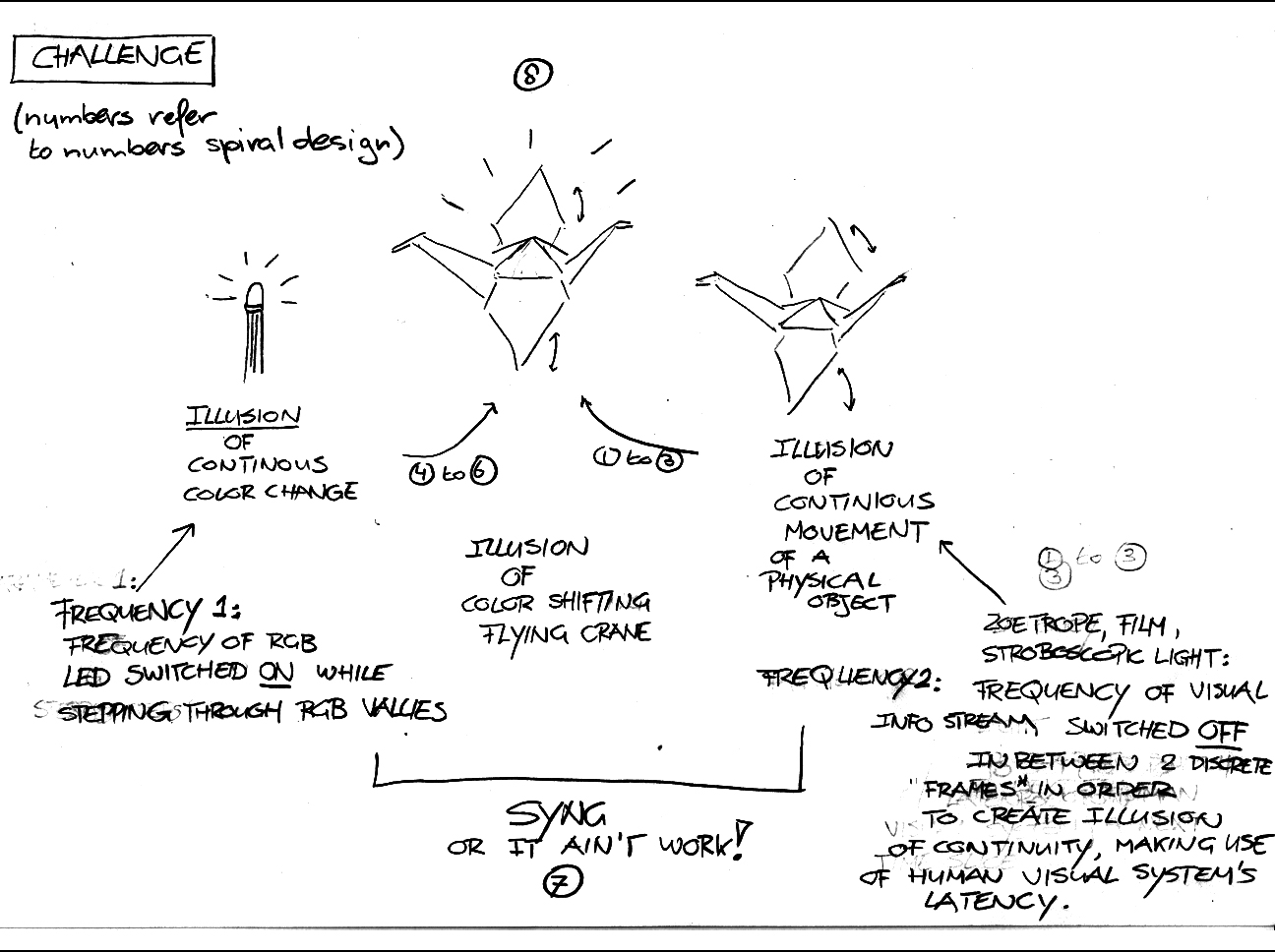
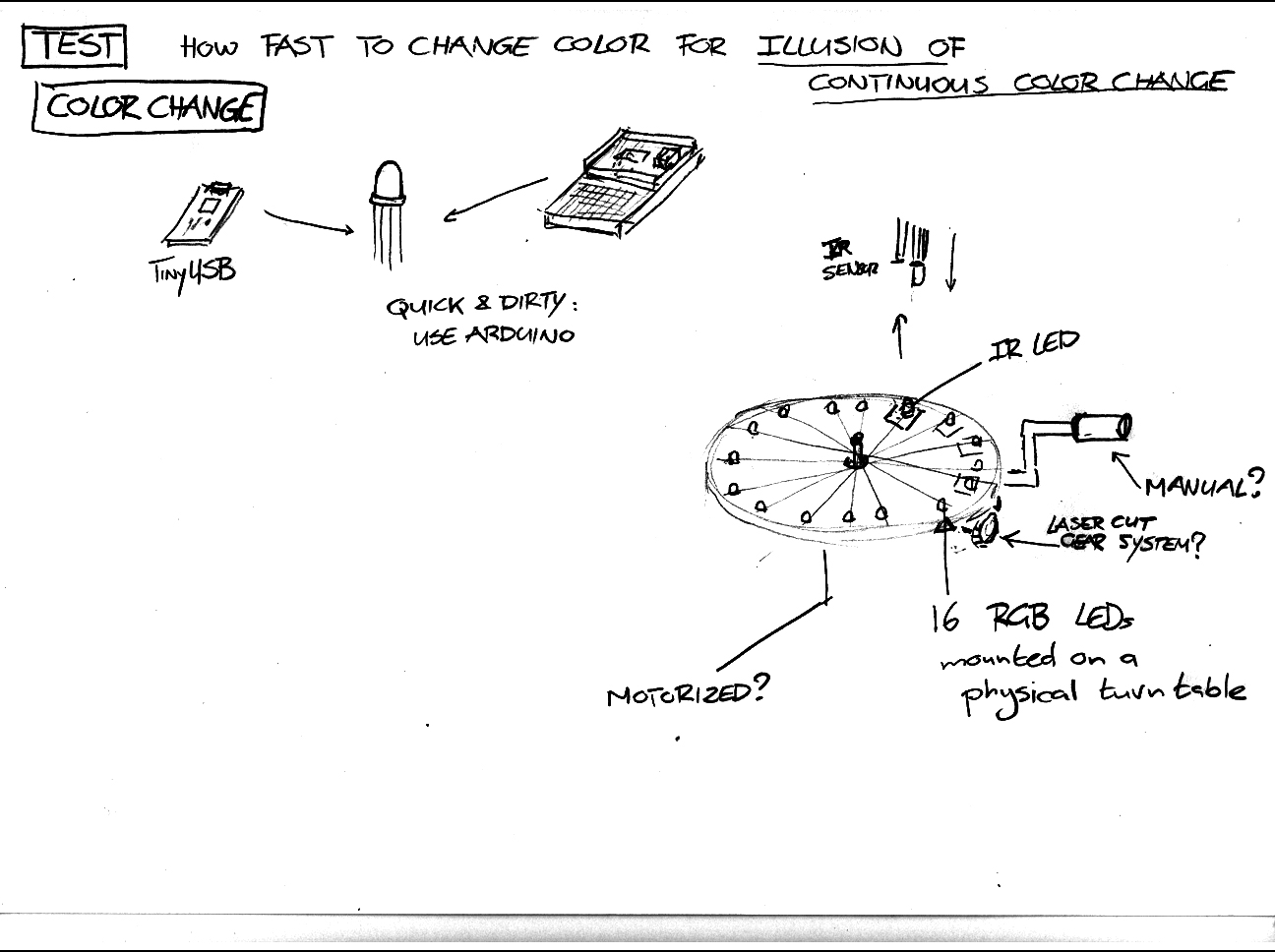
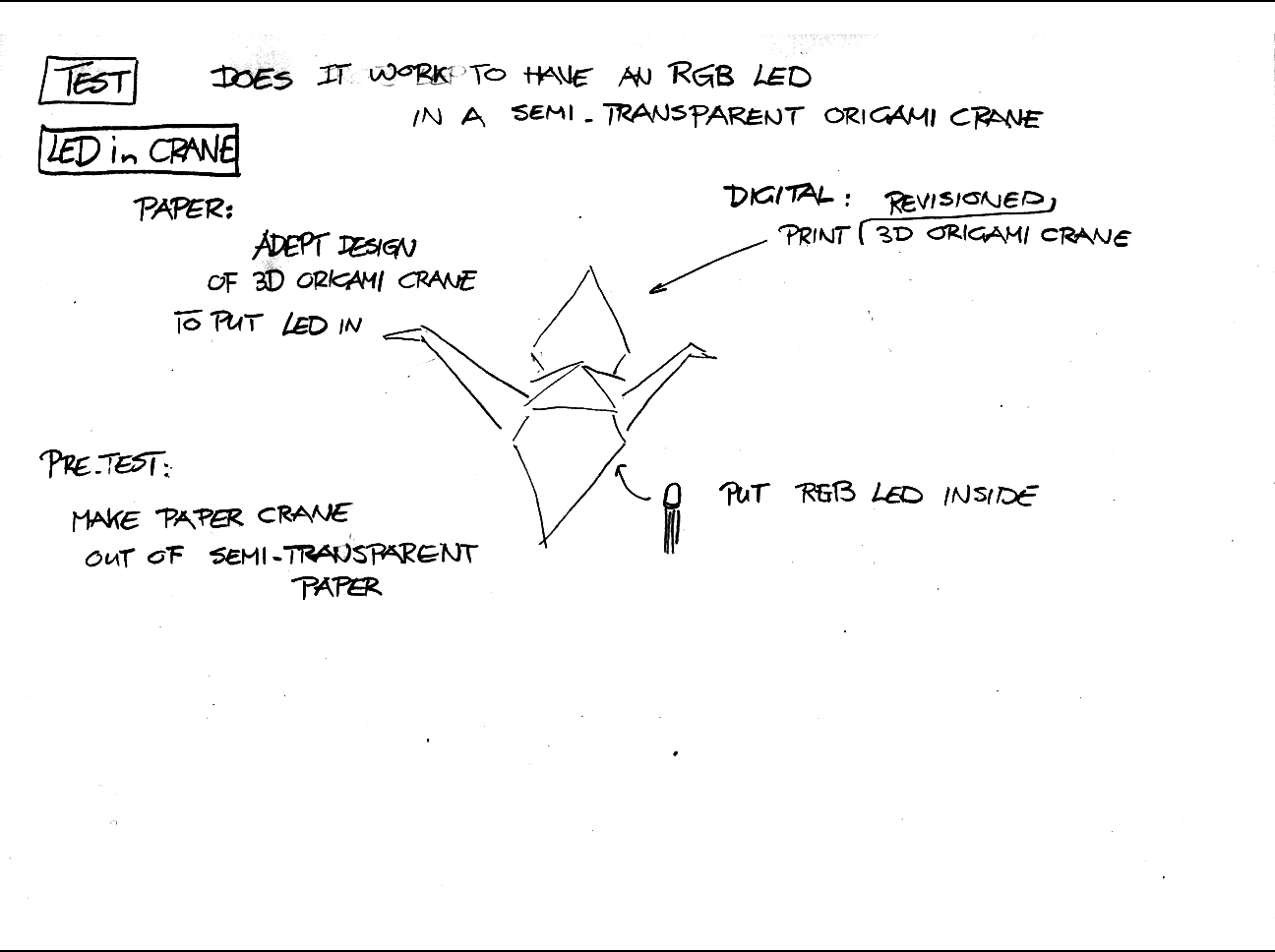
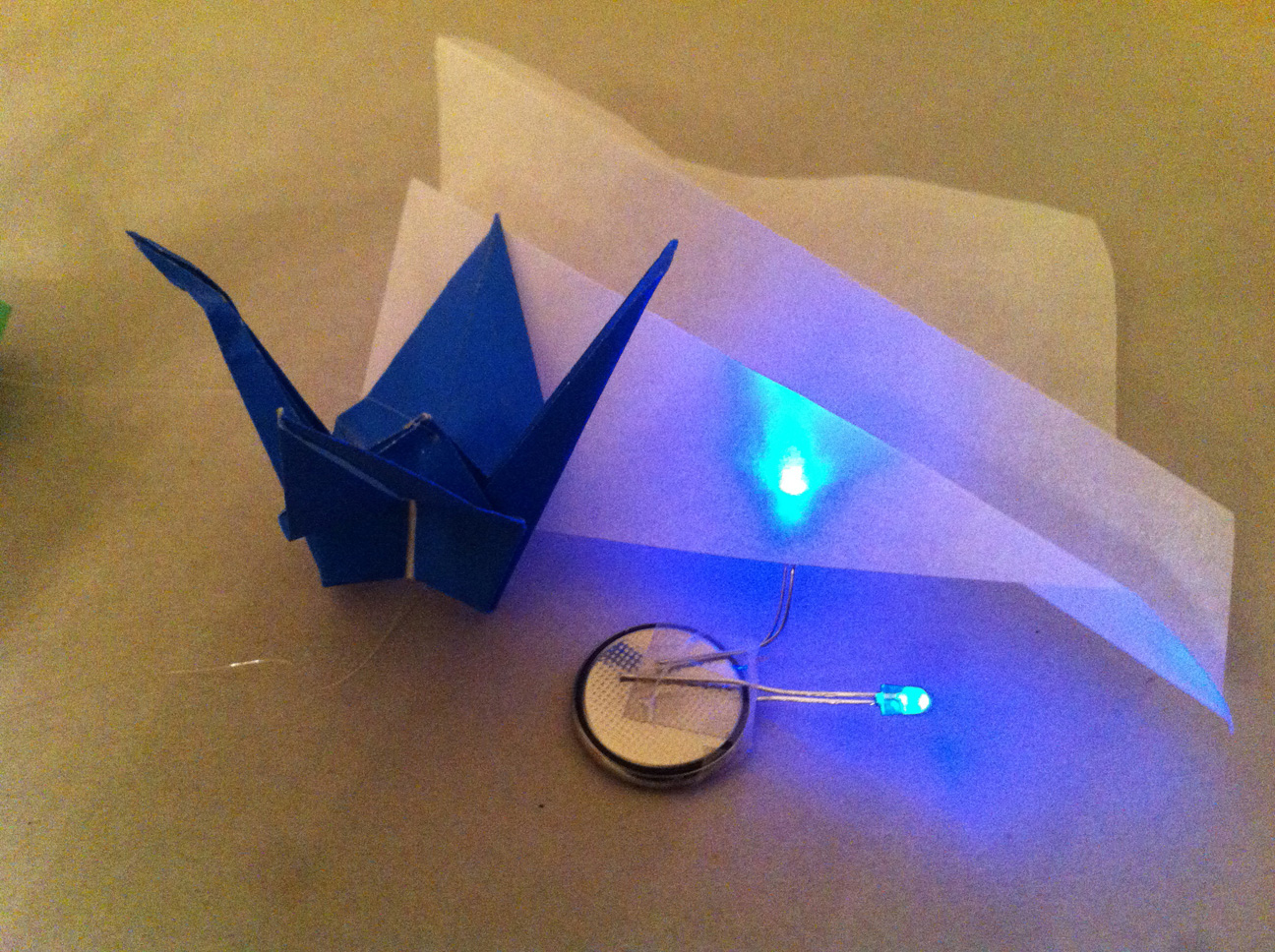
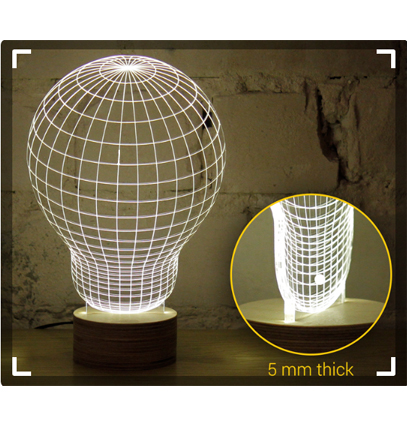
This is where the shades will come from: 16 ATtiny controlled RGB LEDs to display 1024 different colours. The RGB LEDs will be built insides semi-transparent 3D printed origami cranes.

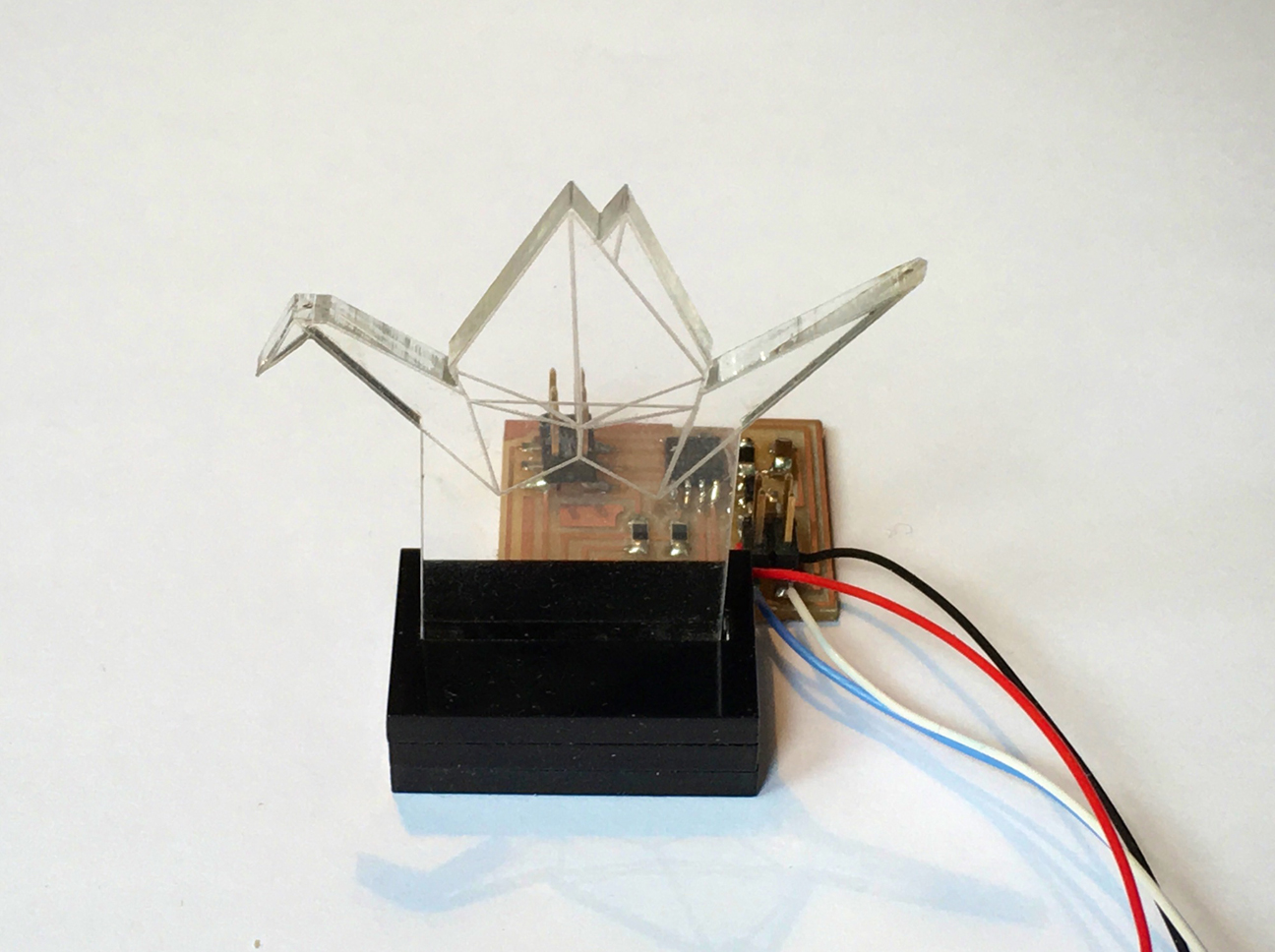
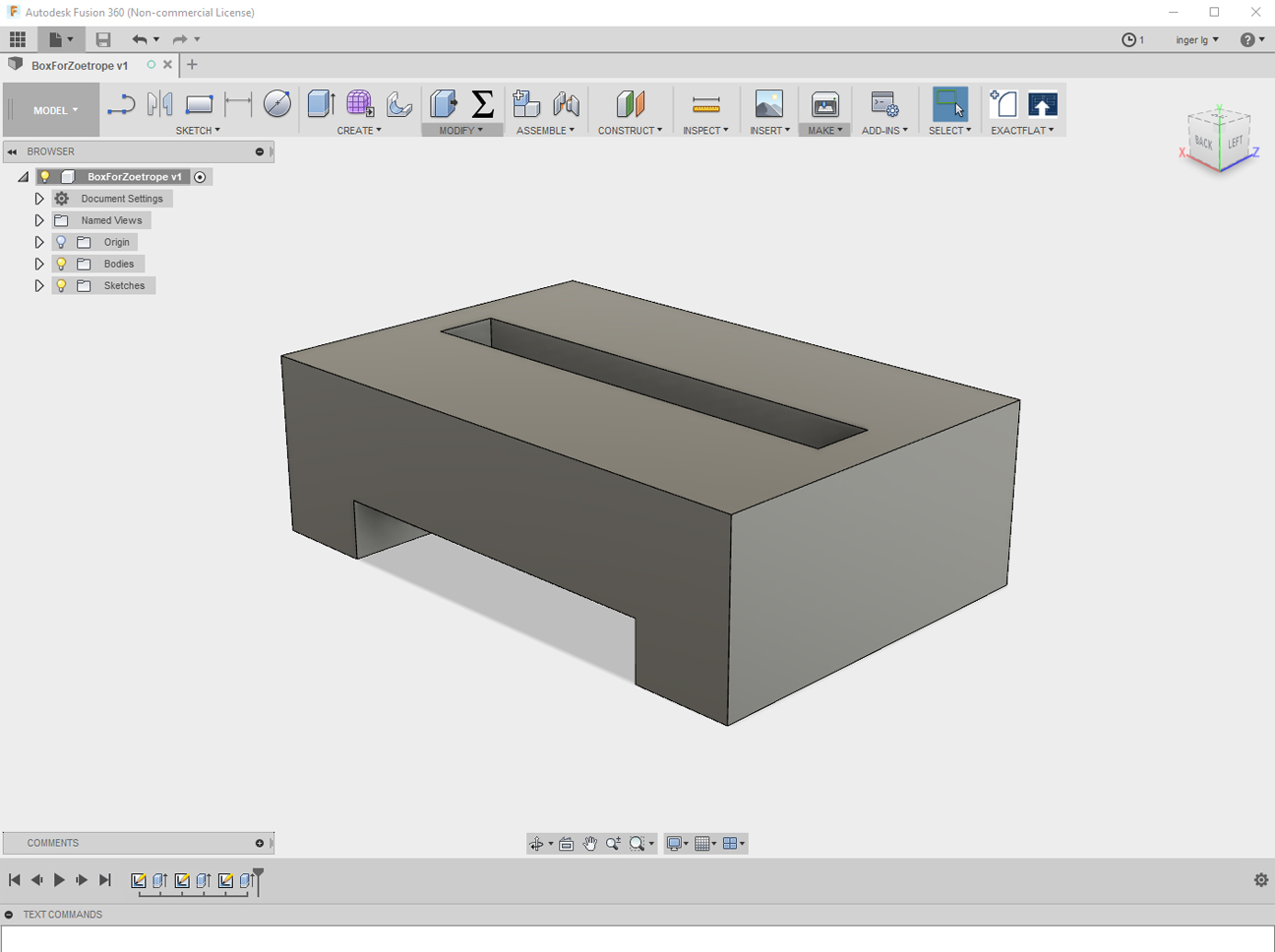
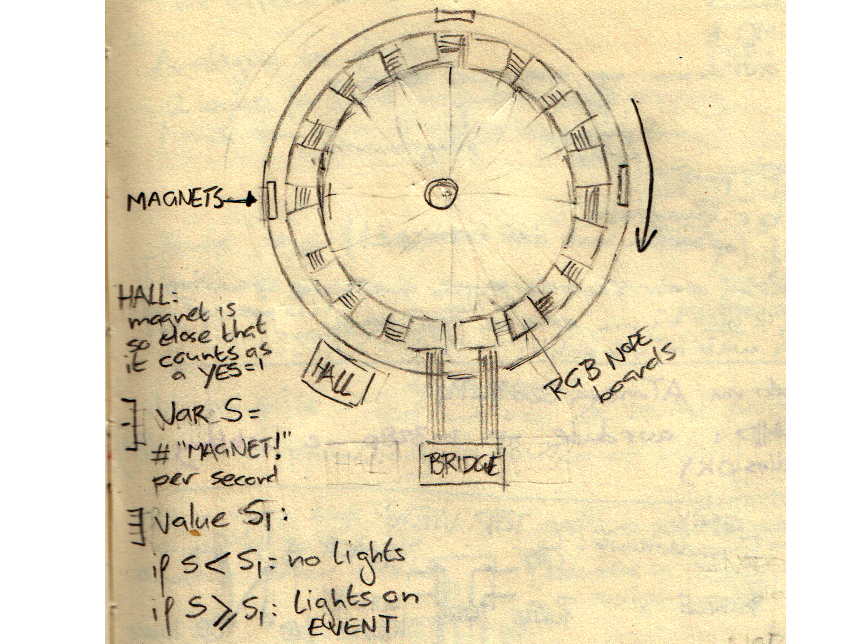
THOUSAND SHADES OF CRANE
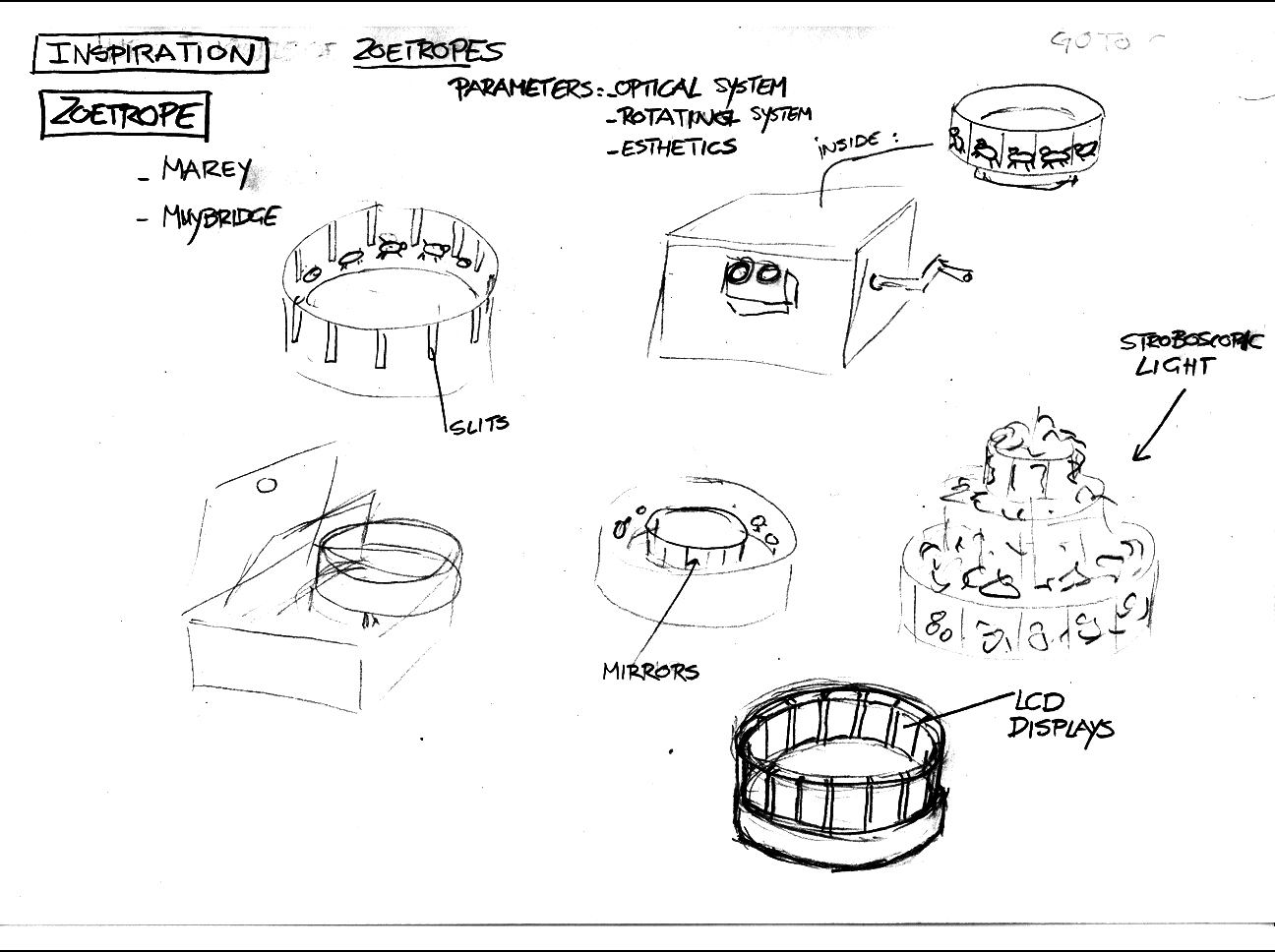
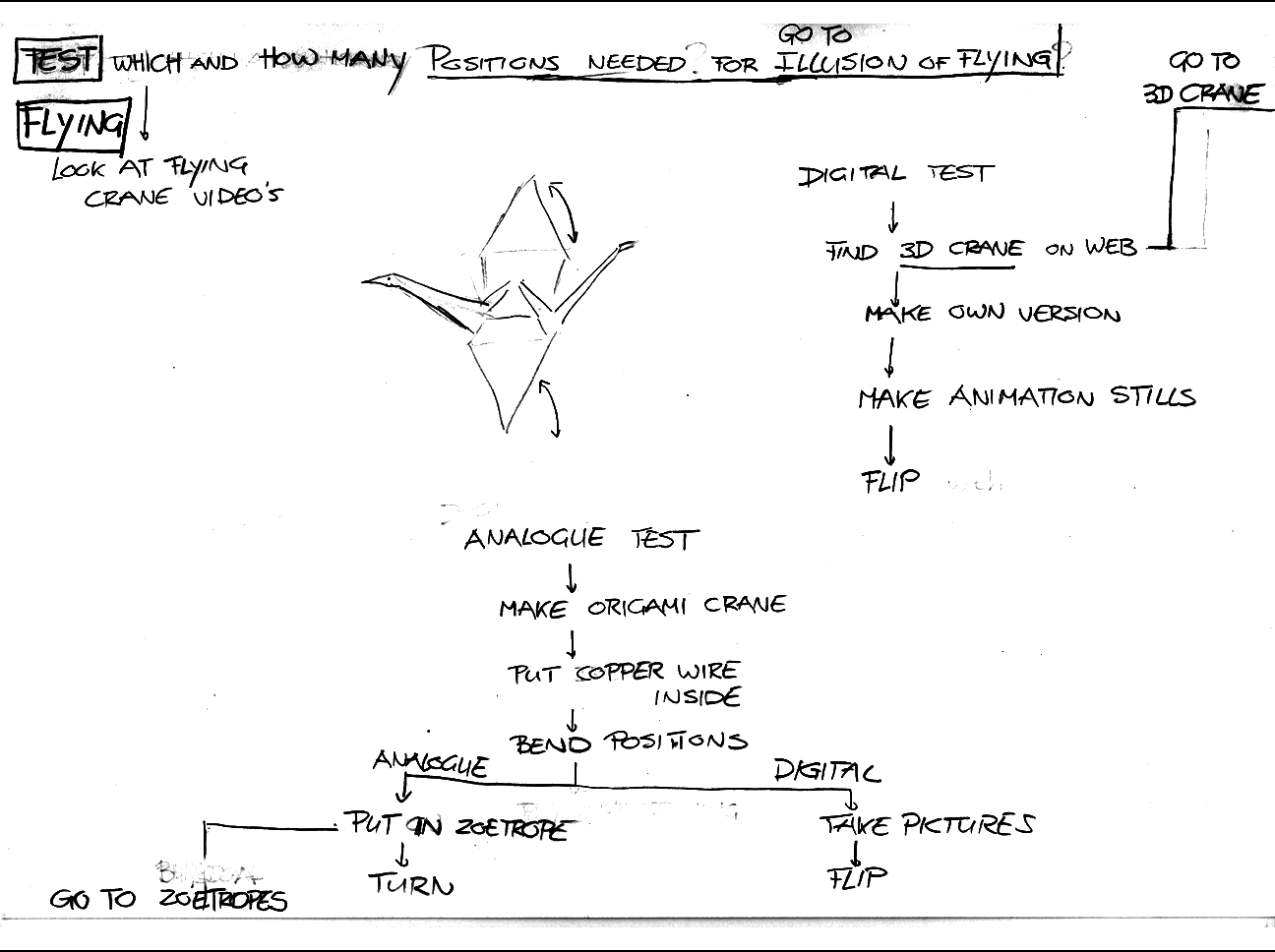
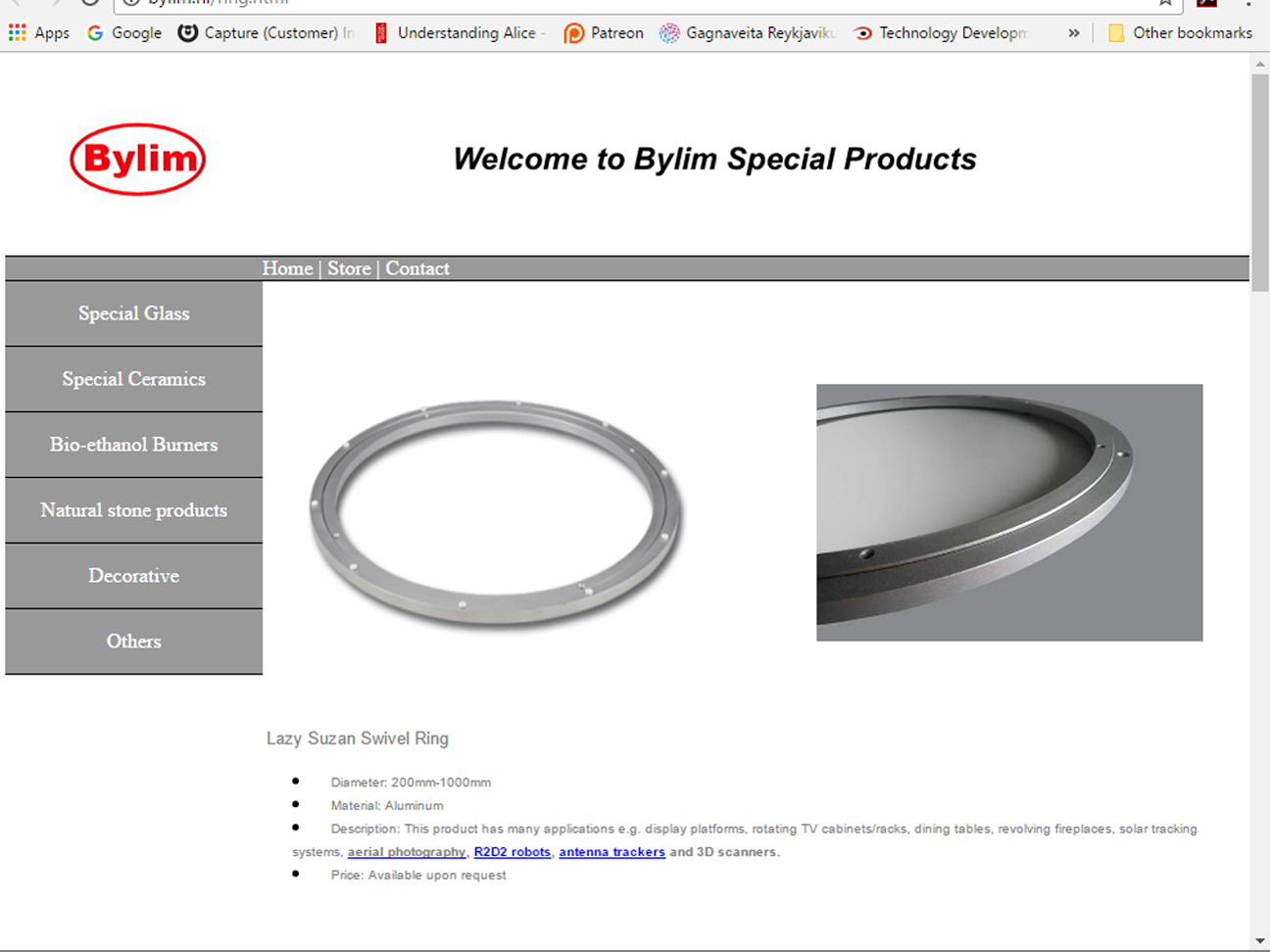
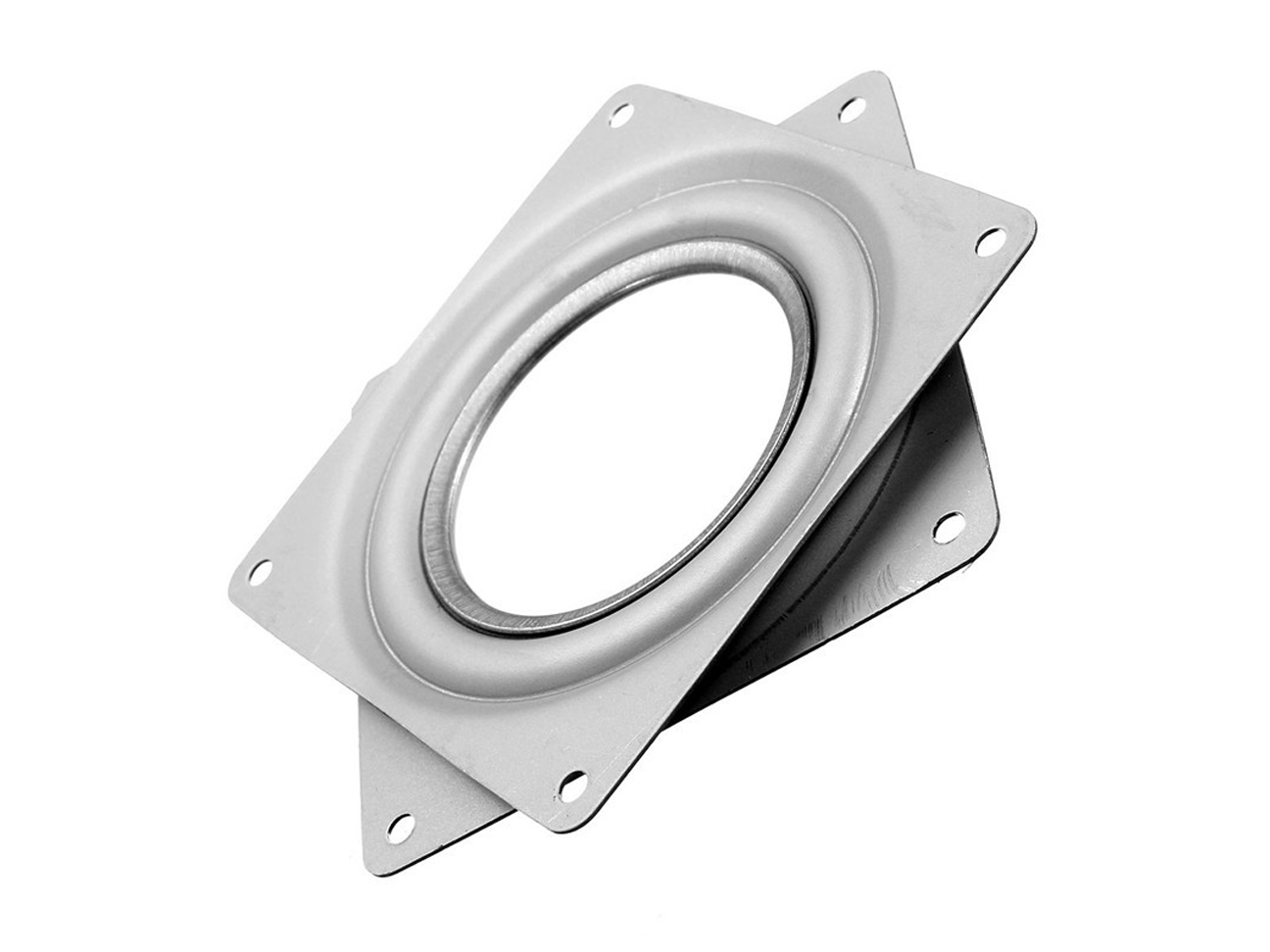
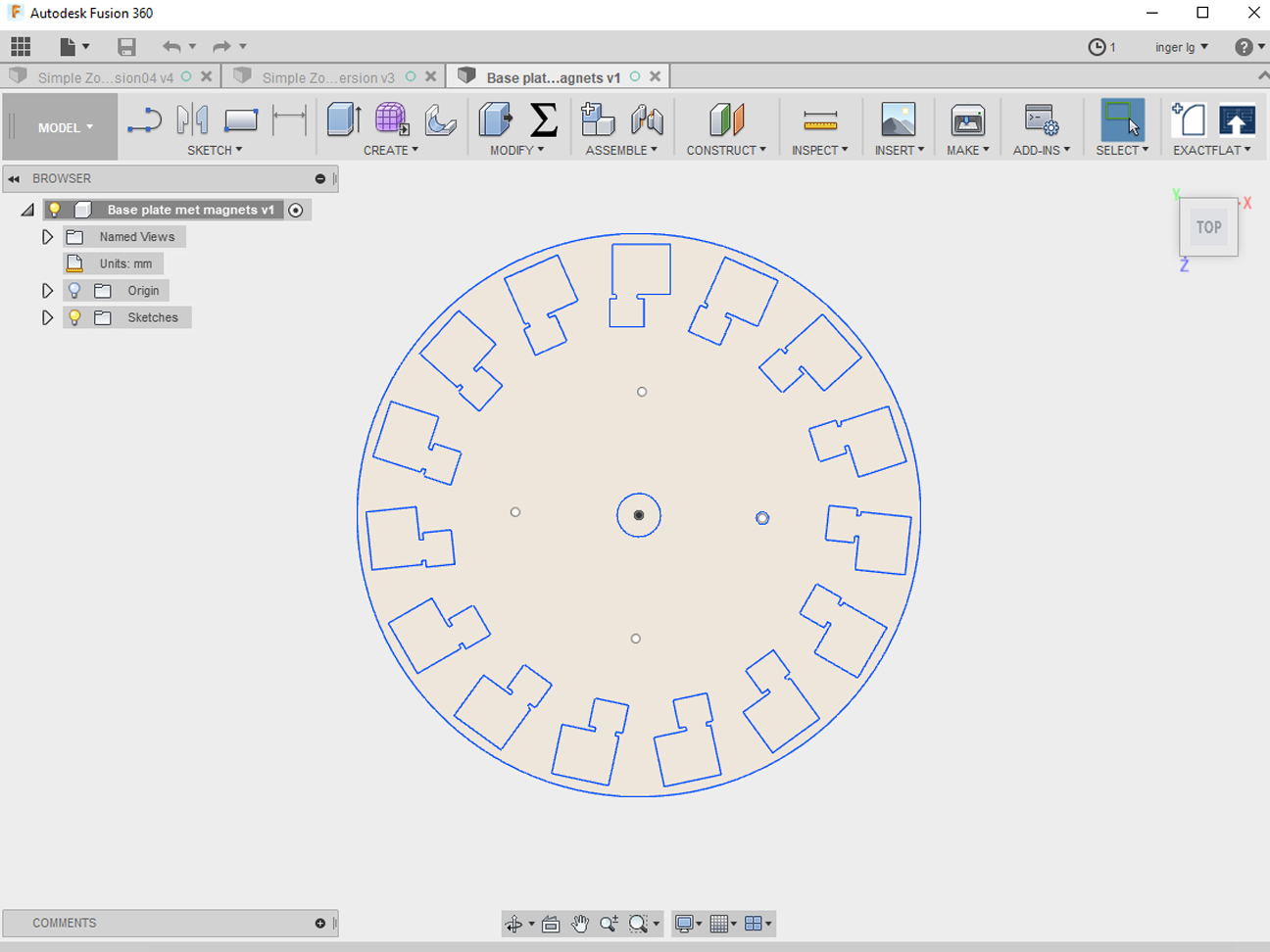
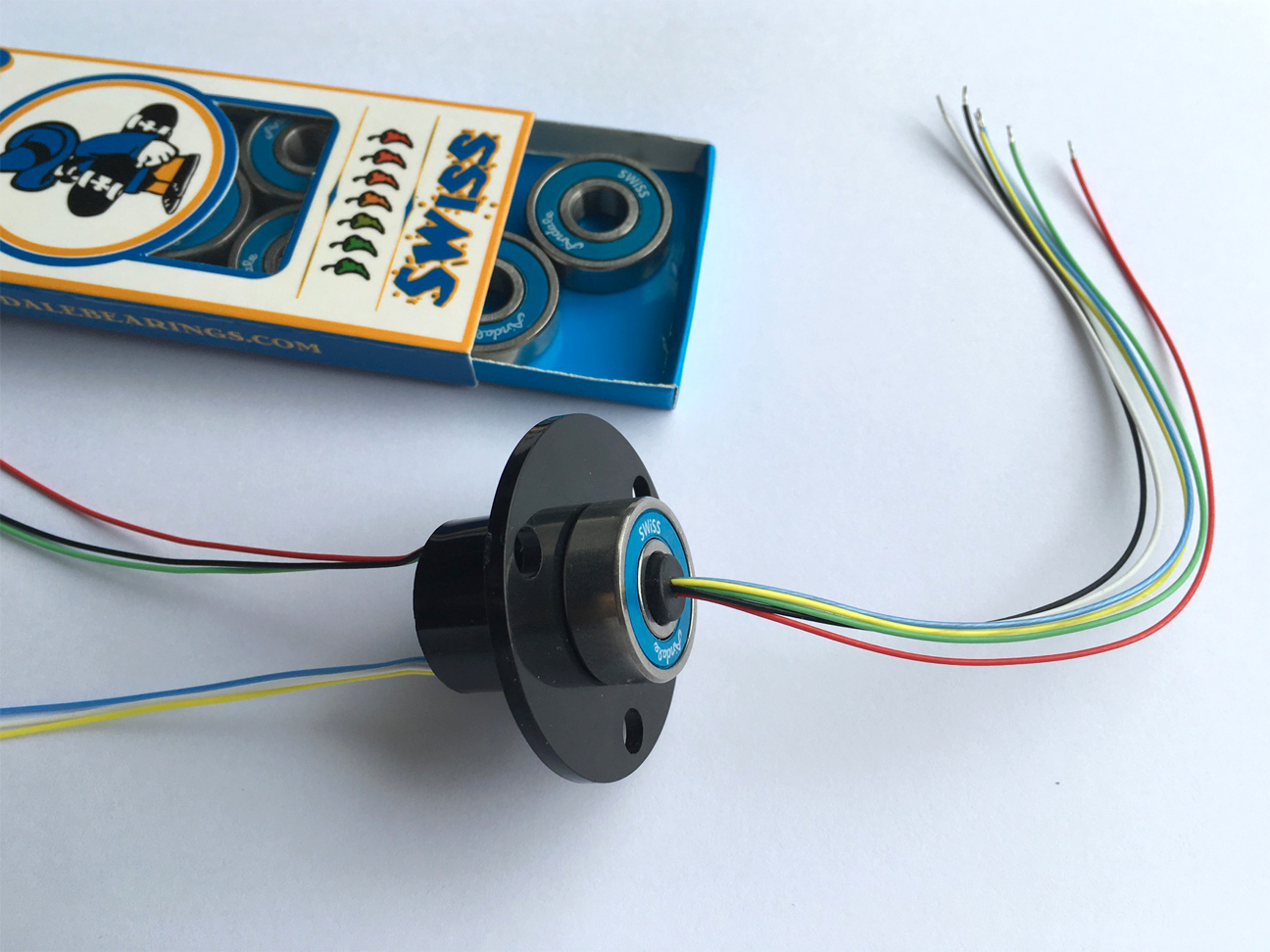
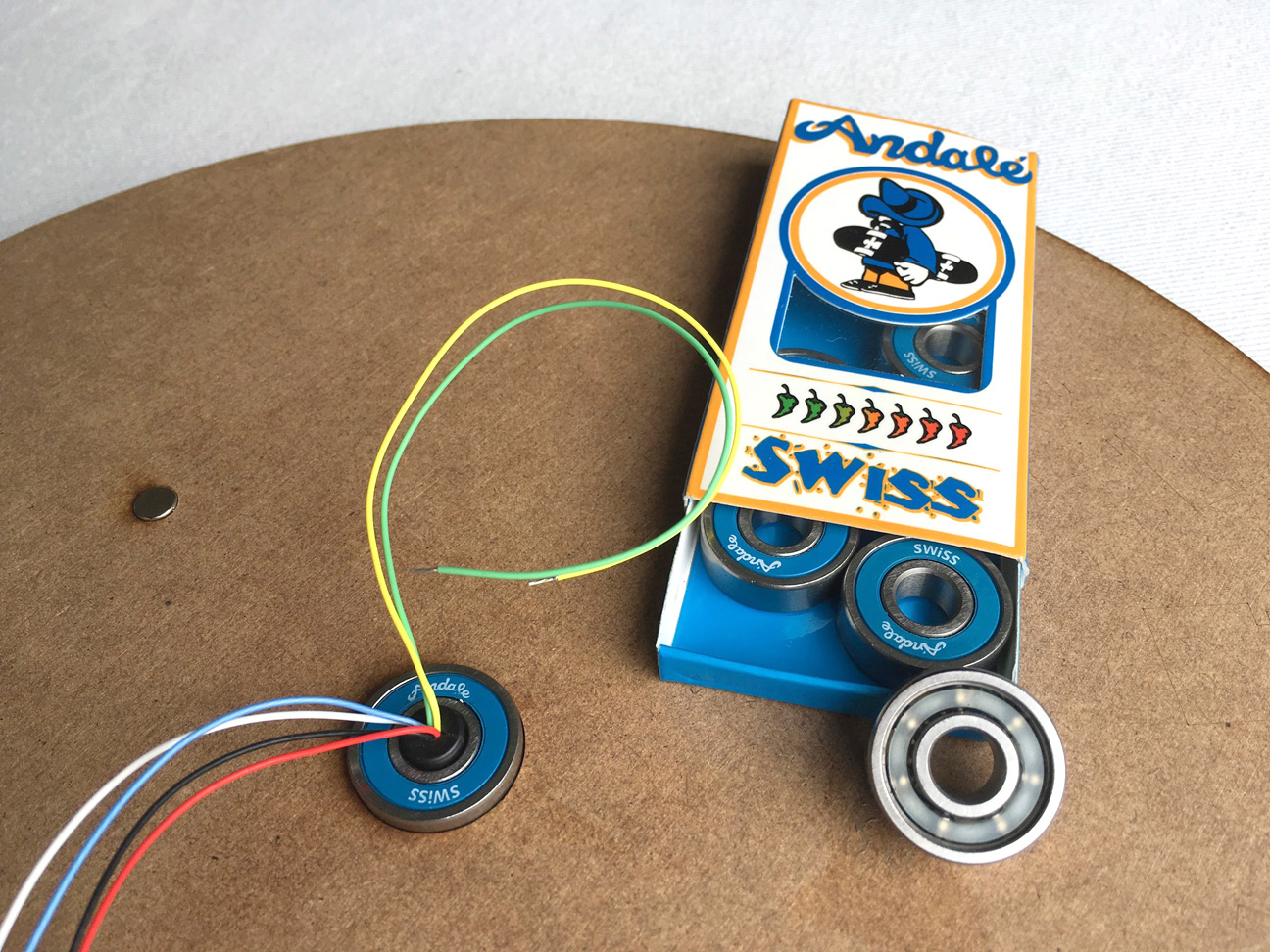
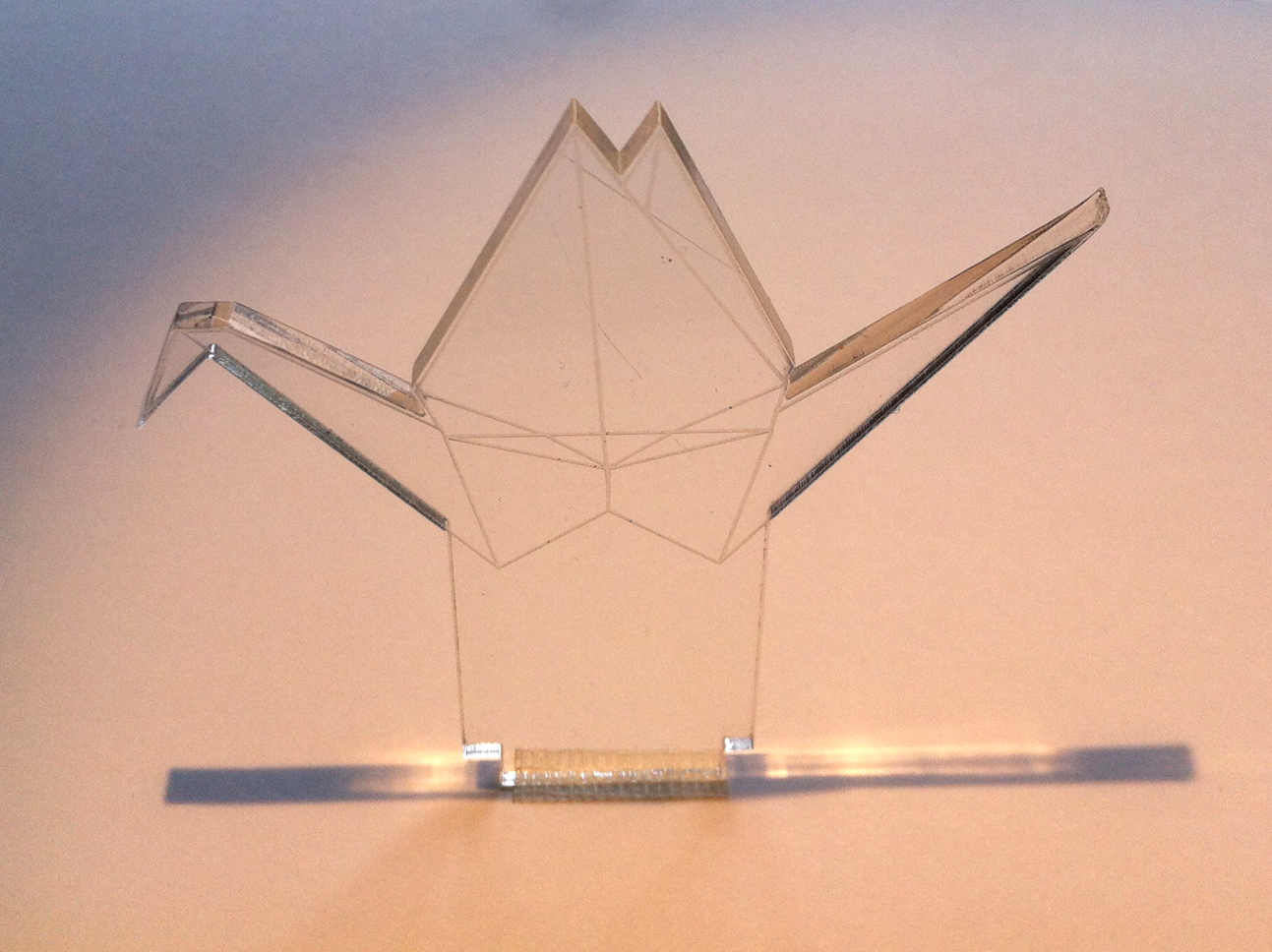
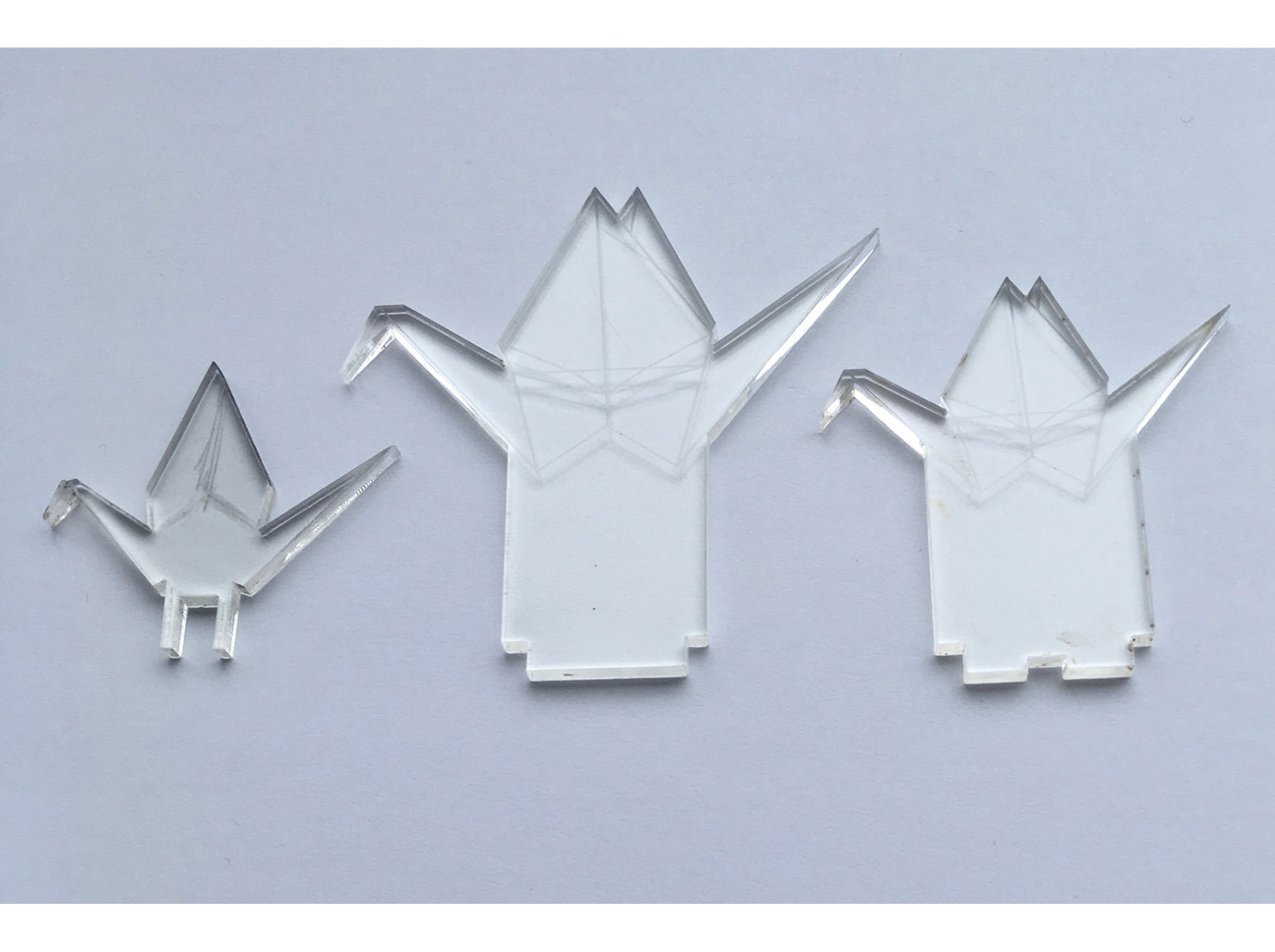
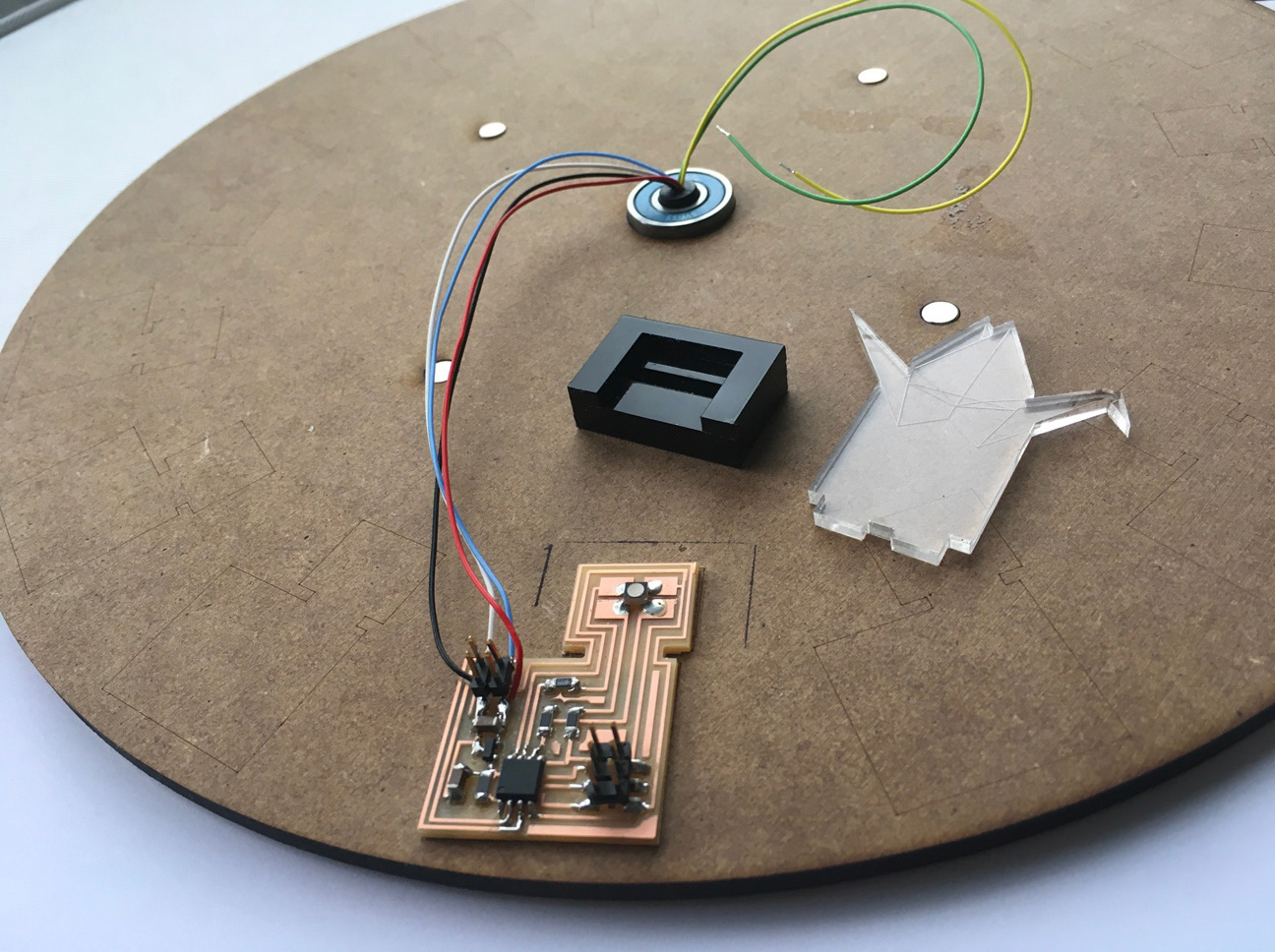
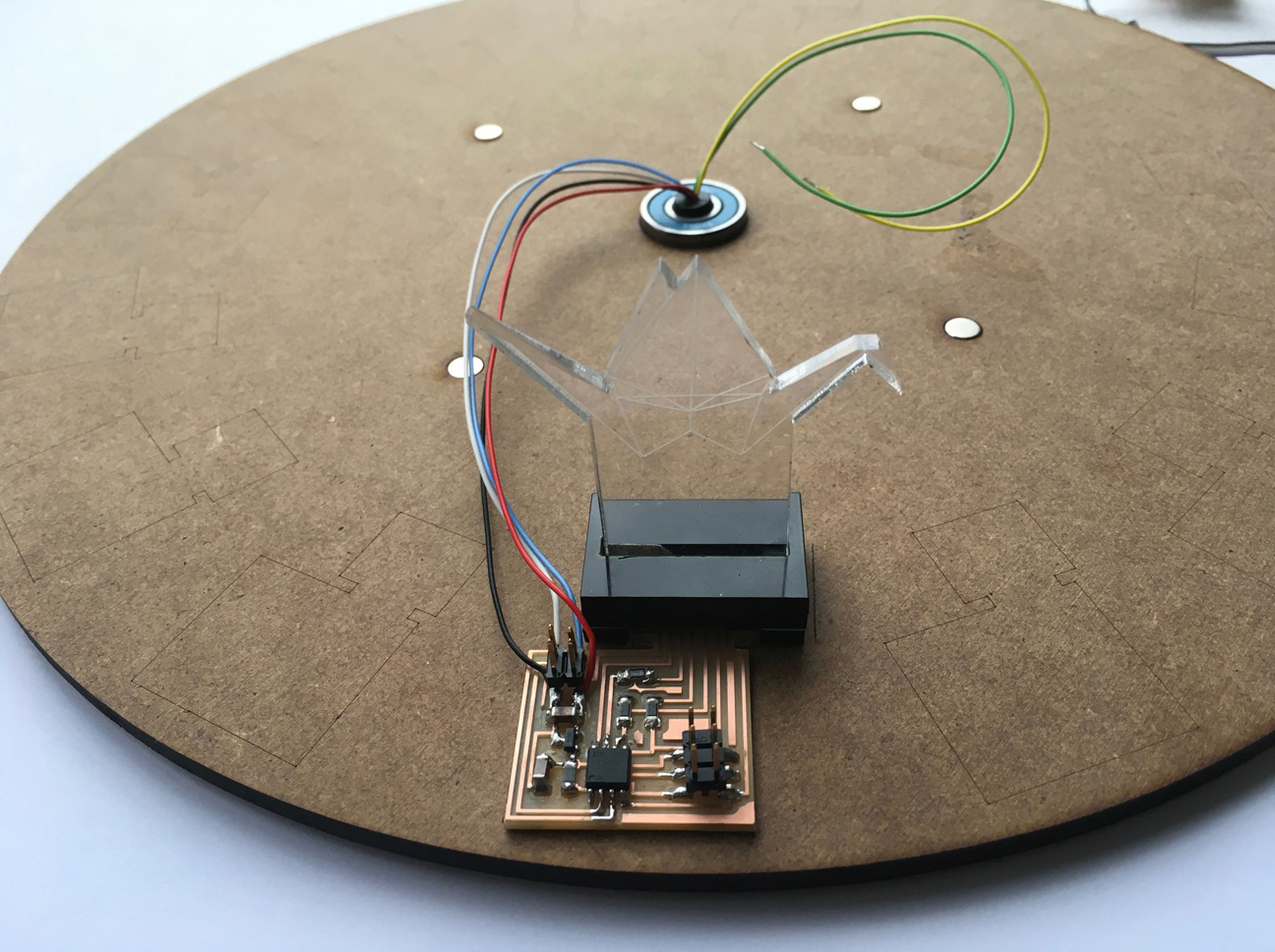
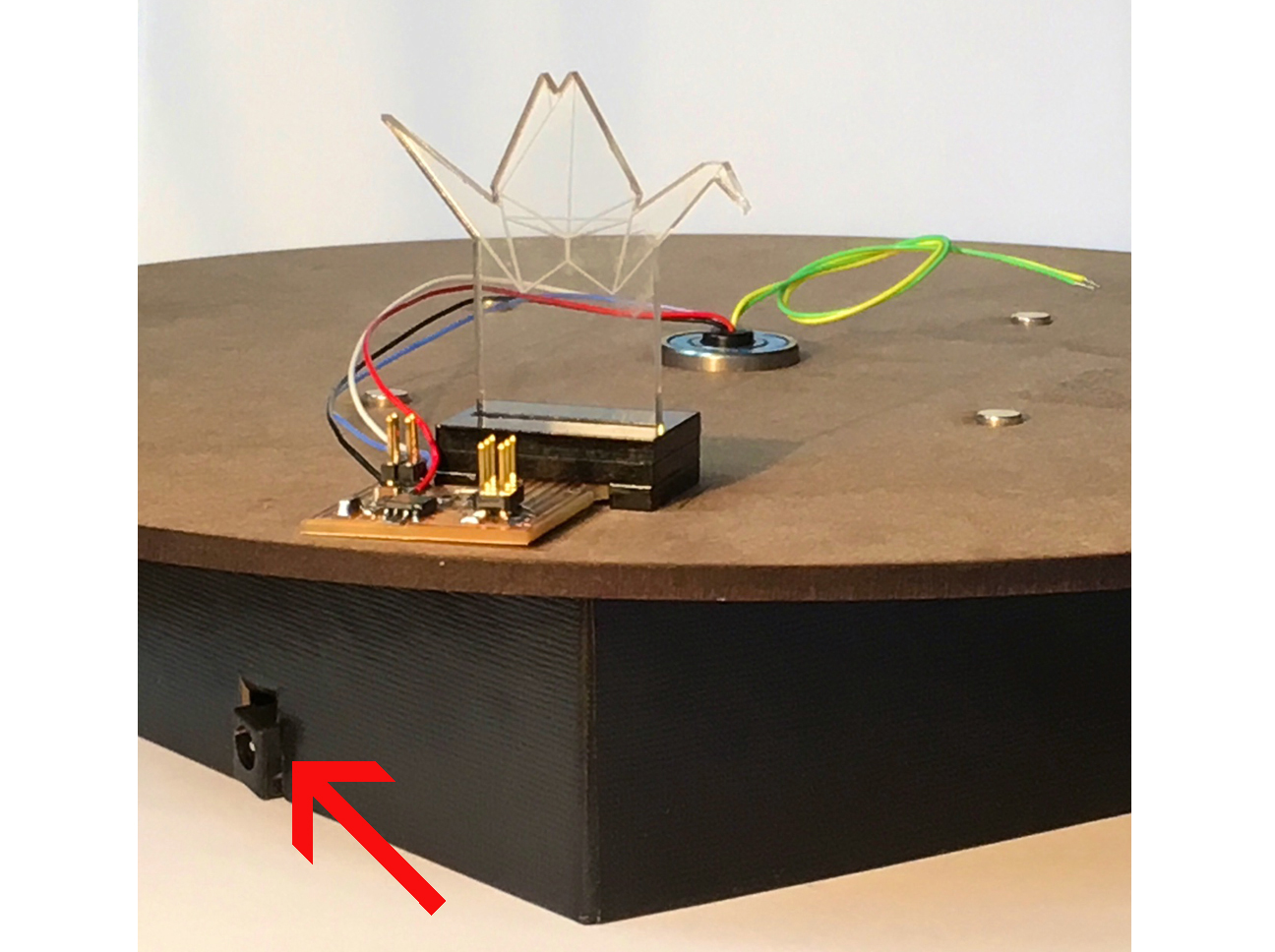
Twelve to sixteen 3D printed semi-transparant origami cranes, each in a slightly different flying position (like the frames of an animation), each containing a ATtiny controlled RGB LED, the cranes positioned on a classical zoetrope: when the turning speed of the zoetrope and the pulse width modulation of the LEDs are properly synchronized, will one really see a colour shifting flying crane?