01
03
14
week 09/10 | machine automation
15
16
This is the mtm part of the FabAcademy! We thought a long time about our project, we wanted to build something nice, which is useful and not a cartesian robot. Christoph wanted to test some cord kinematics and I had some real nice Dyneema cords from my lightweight projects there. So, we decided to build a cord kinematic, which should move something. Some weeks ago, I spoke with a friend of me, about several options to print graphics or schematics on a whiteboard to draw in them by hand. We both liked this idea,so we decided to build this project.
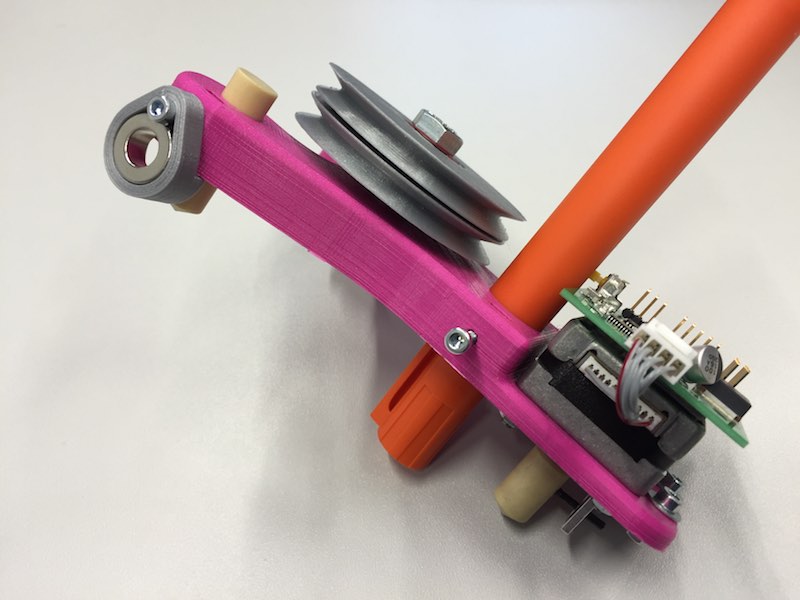
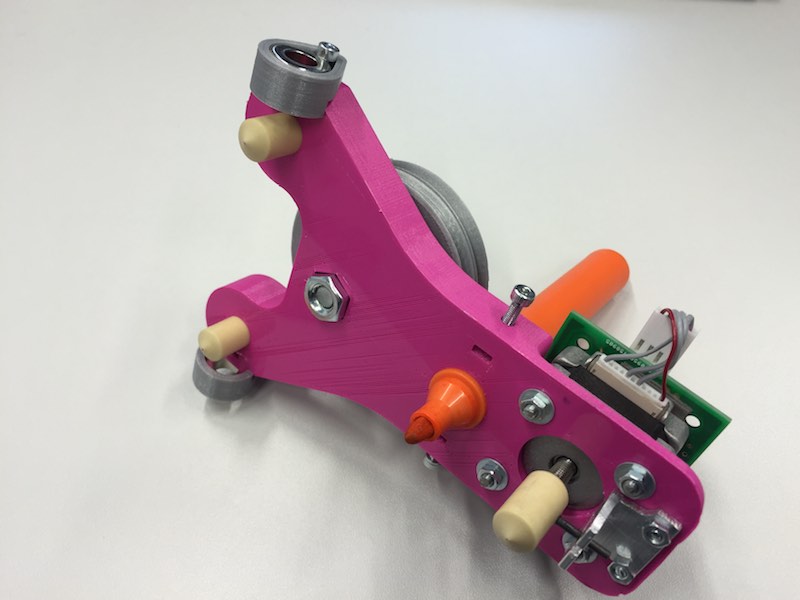
The existing prototype shows the carrier for our automated whiteboard drawing machine. The carrier will be held by two magnets, a simple and very small motor (NEMA14) with integrated leadscrew will lift the carrier to change the position without drawing. The slide tips and the lift tip were made out of Iglidur J from Igus on our lathe.
17
18
19
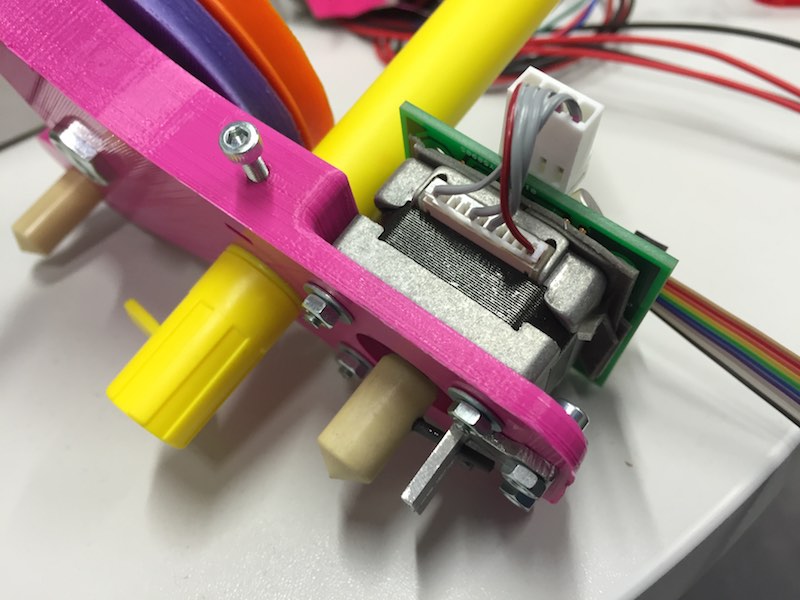
The lift mechanism is a bit special but works that nice. I took some Igus round material, as I used for the upper slider tips, drilled a hole in it on the lathe and then a thread.
To prevent the tip from rotating, a small carbon stick is glued in it. This carbon stick is locked in a groove in a aluminium sheet. When the motor turns, the carbon stick will hold the whole part and through the thread, it moves up or down. This was one of the possible (and a very simple and small) ways to control when the pen should write and when not.
20
21
Download my carrier as SolidWorks model
22
Download my carrier spool as SolidWorks model
23
Download my magnet holder as Inventor model
24
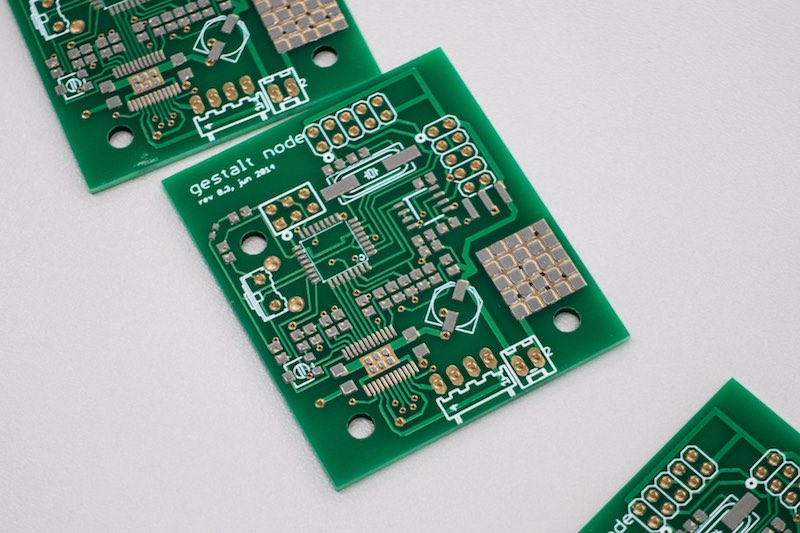
As we had no chance to buy those MTM Kits (financial things and buying something above 420€ is - maybe we call it: difficult - here at our german University), we ordered the boards from Seeedstudio and soldered them by ourselves in our drying oven.
25
26
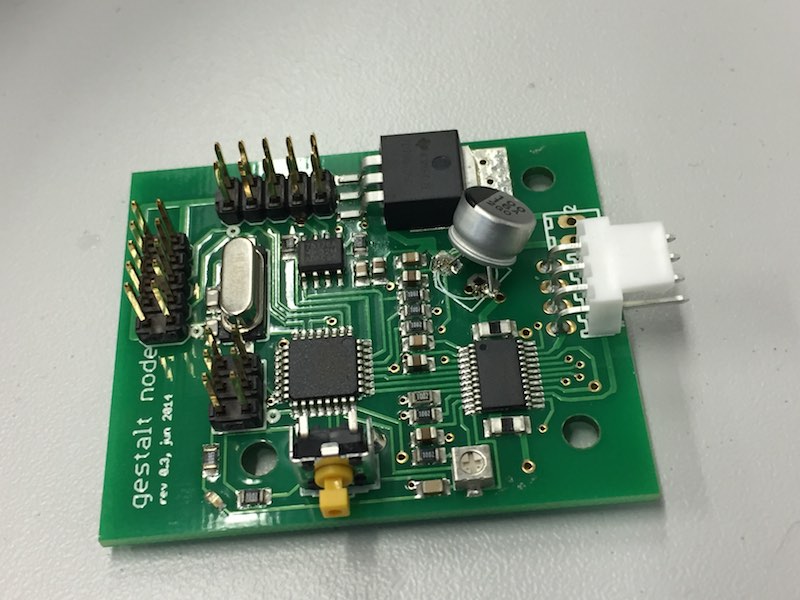
While testing the first things, we found a interesting fault in the MTM BOM!
The 100uF is a 6.3V version - DON'T USE IT! - we blew up two accidently (and a third to get this nice slow motion video...) boards! This capacitor is directly connected to the power source and will blow up while using a source (the MTM boards are allowed to use up to 24V) higher than 6.3V. We were able to repair the boards by unsoldering the old capacitors and resolder some with a higher voltage value capacitor.
27

28
So we had to solder a... uhm... maybe a bit to large... uhm... capacitor... on the boards.
29
30
Maybe we should rename it in: Machines that smoke...
31
32
After some swearing, the whiteboard machine works (with the carrier in its first version) :)
33
34
After the first tests, we changed the setup a bit and added the magnets on both sides to get more traction on the surface. This helped a lot to prevent the carrier from lurching.
35
To include our kinematics into the gestalt frameworks, Christoph played around with math. He packed up the modifications to the framework and the machine we created. He is still working on the math documentation.
36
Before our final tests, we added a holder for the park position and painted a bit around.
First we had the idea to add a color changer but there was not enough time to build this nice feature. This should be a idea for the next version after the FabAcademy.
37
To generate the CAM data for the gestalt framework, we used SVG files, flipped them over onto the upper side, due to the fact that the point of origin in a SVG file is in the upper left corner and not in the lower left, like in the gestalt framework. The FabModules produce a polyline out of a SVG, so we extracted the coordinates, added the start and end code (drive out of the and back into the park positon) and the pen-process (lift the pen, release the pen), to generate a whole dataset to paint the FabAcademy logo onto the whiteboard.
38
After the foretaste in upper videos, we made a final video of the (at the moment) final version of our whiteskater to show you the actual function. Enjoy it...
39

This work by Daniel Bruns is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.