Week 15
Applications and Implications
Final Project Fab Academy 2015
What will it do?
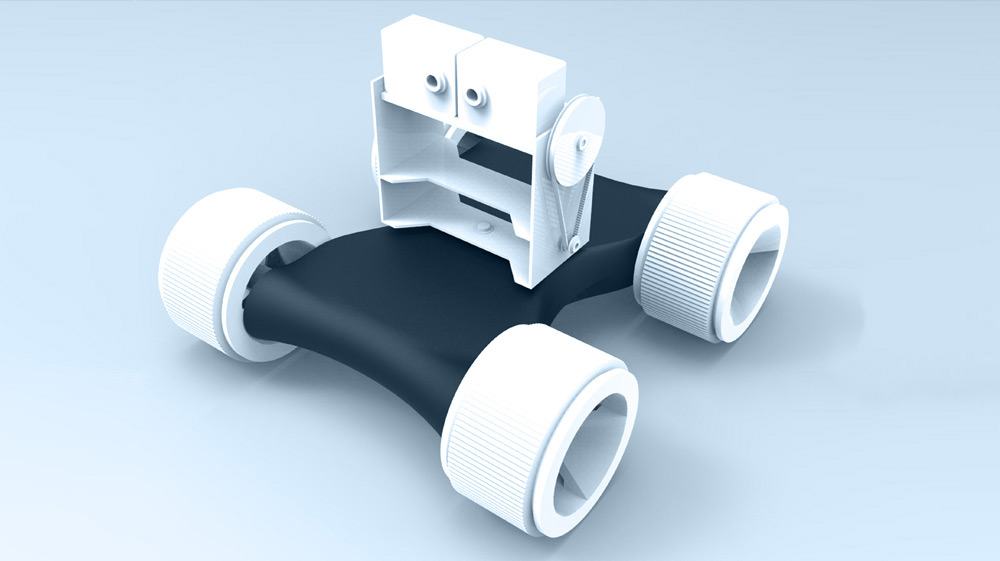
Roll-e is a telepresence robot system. It can be equipped with a smartphone, small tablet or FPV system (FIRST PERSON VIEW). Controllable remotely it was designed for business, educational, but also fun.
who's done what beforehand?
The telepresence robot system existed for several years, allows people who are unable (for health reasons or simply to problems of time, space and money) to travel or attend an event. There are many studies that have been carried out, here an example:, here an example:
http://www.ted.com/talks/henry_evans_and_chad_jenkins_meet_the_robots_for_humanity
There are several examples of amateur robot, equipped with cameras, they are used to
reach places inaccessible to humans, here an example:
http://2015.officinerobotiche.it/myzharbot/
With the increasing use of teleconferencing systems, many companies are producing increasingly more innovative systems, here an example:
what materials and components will be required?
Mechanical: Mobility is the key part of this project, for this reason the robot is equipped with two DC Motors [7,80€/unit] (to move and steer the cart, using gears system in PLA 3d printed and trapezoidal belts [10 €/unit]) and two servo[5/7€/unit], to move the “tower” camera ( PLA 3d printed). The systems will be powered by battery 12 V. At the base of the tower it is possible to connect different types of devices: my first idea involves the use of 3d cam and the FPV system, but probably for now I will be using a smartphone or a simple Cam to reduce costs. The shell is made with composite system [7/8 €]and the internal structure in PLA 3d Printed [28 €/unit, but 10/12 € for my project].
Mechanical cost: 62,6 €
Electronics: I will use a main board and a shield (there is the possibility, but is optional that I use a Raspberry Pi to transmit the video to the PC, a wifi shield to remote control and a battery control system).
Main board:
- Atmega 328P [3,54 €/ unit]
- 8 MHz external resonator [0,35€/ unit]
- Switch Button [1,24 €/ unit]
- FTDI Communication [0,03 €/ unit]
- 2 Unpolarized Capacitors 1206 0.1 uf [0,34€/unit]
- Unpolarized Capacitor 1206 1 uf [0,24 €/ unit]
- Electrolytic capacitor 10 uf [0,50 €/ unit]
- Resistor 1206 10k [0,10 €/ unit]
- Resistor 1206 499 [0,10 €/ unit]
- LED YELLOW CLEAR 1206 SMD [1,34 €/ unit]
Board cost: 8,12 €
Shield:
- 2 H Bridge [1,95€/ unit]
- 6 PCB connector CMM5-2 [0,40€/ unit]
- 3 Female Header 8 pin [0,10€/ unit]
- 2 Electrolytic Capacitor 10 uf [0,50 €/ unit]
- Unpolarized Capacitor 1206 0.1 uf [0,24 €/ unit]
- Resistor 1206 0 [0.10 €/ unit]
- Voltage regulator ncp1117 sot 223 [0,15€/ unit]
Shield cost: 8 €
The control of the robot will be with wire (only for the prototype) or wifi: in the second case, I would add a wifi shield control.
where will they come from?
I will buy all on line in the electronic shops, but I try first to recover and reuse pieces such as the motor dc (from an broken printer) or second hand belts, etc. I will buy the material easier to find directly at a local Electronic Store.
how much will it cost?
Mechanical cost: 62,6 € [but I will use the shell did for the Composite assignment, the dc motors Recovered from a broken printer, bought second hand trapezoidal belts] 33,6 €
Board cost: 8,12 €
Shield cost: 8 €
Total cost: 78,72 / 49,72 € (if I will buy Raspberry [36/44 €] and the level shifter [5€] total change to 127,72 / 98,72 €)
what parts and systems will be made and what processes will be used?
Mechanical: I did the shell using the composite system. Each mechanisms are my project: I did the 3d model of each block and I will print them in PLA. I will reinvent a belt system for the motion use as a cingulate. I will assemble each part and component.
Electronics: Using the Fabkit as base I adapted the board to my needs. Then I did the shield for the regulation of Voltage, motors dc and servos control, designed by me. I draw in Eagle the boards and I milled them. Then I will solder each components. I wrote the C code in Arduino IDE and I will flash the board. I will use and will improve the interface created during the interface assignment. I started learning Python and search for references to create software, if I can (time problem) I will use the Raspberry Board to transmit the video.
what tasks need to be completed?
Mechanical: I need to redefine the 3d model of each mechanisms according with the project changes and print them. I'm waiting for PLA and the servos.
Electronics: I need some basic component to complete the solder. I will improve the interface created during the interface assignment or if I will use the Raspberry try . If I will have time, I will use the Raspberry Board to transmit the video (I started learning python to create software and search for references).
what questions need to be answered?
How do I synchronize the latencies between the video transmission and controls for a better user experience?
If I will use an html page to send the video streaming and another page html (with a "form" that uses "post" method) to send at python script the robots commands, how can I integrate the two on a single page html?
what is the schedule?
May 21 - Finish to design the mechanical component,
May 25 - Start 3d printing and cutting test component
May 26 - Try the components -> Fix them
May 28/29 - 3d printing and cutting component
May 30/31 - Sketching C code and Control interface (if I will use Raspberry, programming software)
June 1/2/3 - Soldering, wiring, programming and fix them
June 4/5/6 - Building Robot and fix them
June 7/8/9 - not go crazy
how will it be evaluated?
I am particularly keen to the aesthetic factor, but I designed something centered on the electronics and programming. I started from zero and now, I made, something (although if for the more experienced is just a toy). Surely there will be beginner errors and inaccuracies, but the robot works exactly as I wanted!!!