Wednesday 20:th of May.
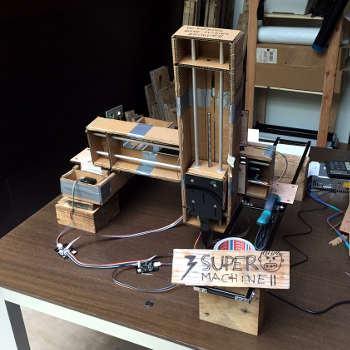
Making a 3 axsis machine:
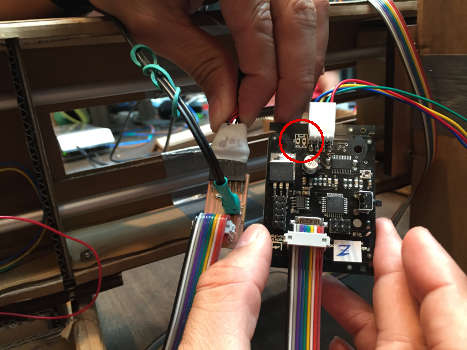
Making cables
We started to make a list of all the task we could come up with. It was not that easy since non of us have done anything like this before. From the list we assigned a group of tasks to each person. I got the programing movement... but first we needed a power supply and cables to get it all connected.

Getting things to move
After cloning and installing the git archive I ran the single_node.py. and just like that the first stepper motor was running. Now I had to figure out how to do a virtual machine and control it in real time... and what was this gestalt thing anyway!? I turned to Ilan Ellison Moyer thesis in hope of answers.