Xl320 shield
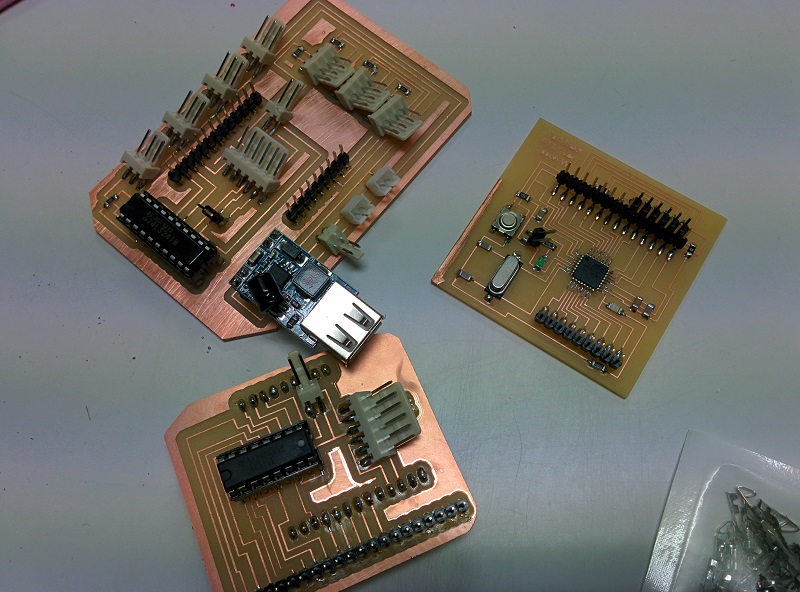
The top left is the xl320 motor shiled I designed to control XL-320 motor. The botton one is the analog duplex shield from last week, and the right one is my modified version of FTDI satshakit board.
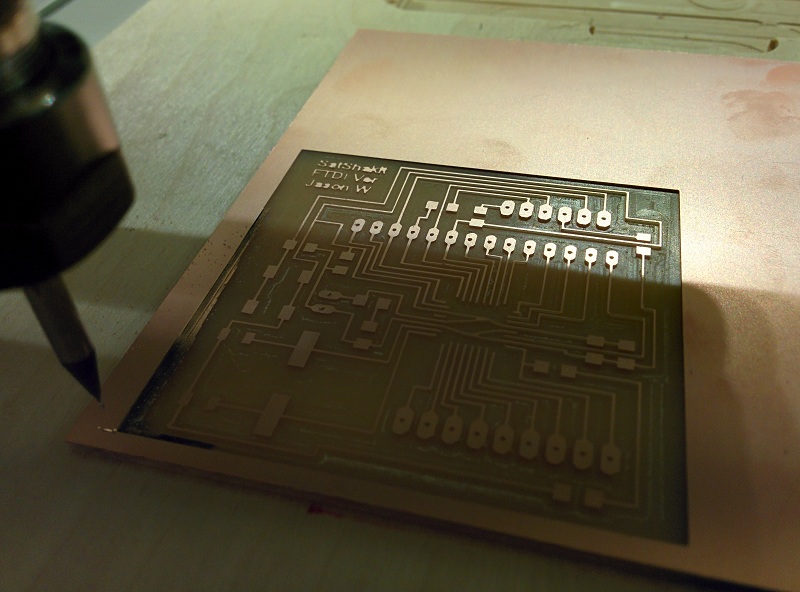
Milling the modified version of satshakit.
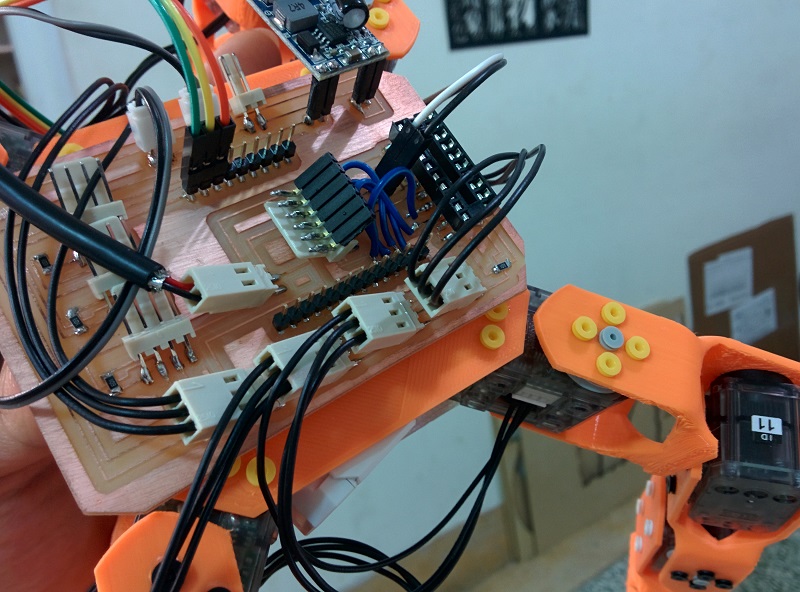
Here is the connected morotrs and the board. The main mcu is on the other side of the body. Notice the lack of 74LS241 chip on the shield. Interestingly enough, apparently there are ways to do half duplex without 74LS241. Two ways I would like to try if I have time, connect rx/tx with an resistor in the middle, or connect tx directally into the mortor signal line.
In conclusion, The motor is actually easier to control than I think, and it's a really good intro unit to learn how to control smart servo.