Assignment Week15
Interface and application programming
This week’s assignment is "propose a final project that integrates the range of units covered:”.
I answered below questions.
What will it do?
I will make Robotic cinema camera. It can move and shoot a movie, following simple camera work what I order.
If I turn on power, Robot starts movement. This camera can be set shot direction.
Robot moves and keeps direction of shooting object.
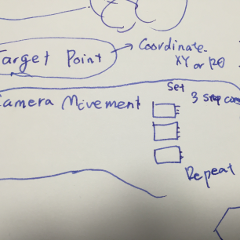
This is my laf sketch.
Who's done what beforehand?
I found lower product. It can follow-up a moving object in automatic.
This project is very interesting and similar with my project.
But my project don't have automatic tracking function. For shoot a movie, this function is not enough. Because, movie is expression. It can’t by machine.
Technique of layout of screen is very deep.
So, If we shooting cinema, camera should be moved by human intention.
What materials and components will be required?
>Electronics
Geared DC motor for move machine and camera.
Micro computer for calculate machine’s movement
Rotary encoder for detect machine’s speed
LED for indicate condition
>Mechanic
MDF T=5.5mm
acrylic T=3-5mm
PLA for 3D print
Gear box for Toy
Parts for tire
Where will they come from?
>Electronics
Geared DC motor : DIY ceter
Micro computer : My FabLab
Rotary encoder : Internet shop "Akizuki
LED : My FabLab
>Mechanic
MDF T=2.5mm : DIY ceter
acrylic T=3-5mm : DIY ceter
PLA for 3D print : My FabLab
Gear box for Toy : DIY ceter
Tire parts : DIY ceter
How much will it cost?
>Electronics
Geared DC motor : 1500JPY x3
Micro computer :500JPY x2
Rotary encoder : 500JPY x2
LED : 50JPY*4
>Mechanic
MDF T=2.5mm : 1000JPY x2
acrylic T=3-5mm : 1000JPY
PLA for 3D print : 1000JPY
Gear box for Toy : 800JPY x2
Tire parts : 500JPY
What parts and systems will be made?
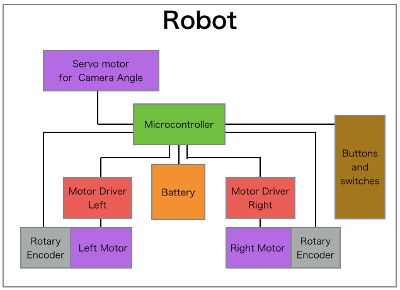
Micro computer drives two Geard DC motors that connected two tires.
Rotary encoder detect rotation of tires. It connect to Micro computer.
What processes will be used?
Making body : Computer-controlled machining
MakingPCB : embedded programming
MakingMotorDirver : Output devices
Making Shaft holder : 3D printing
What tasks need to be completed?
Making rotary encoders.
Makign body and tires.
Making running distance detect system by rotary encorders.
Making velocity control system of DC motor.
What questions need to be answered?
How to detect running distance?
How to design control terminal?
What is the schedule?
5/24 : Making rotary encoders
5/25 - 5/31 : Making dirve circuit
6/1 - 6/7 : Making body and tires.debugging.
How will it be evaluated?
It can move following my order.
It can start movement following my power switch.
Projects can be separate or joint, but need to show individual mastery of all of the skills
Skills what is used this project is 2D-CAD, 3D-CAD, electronics design, output device control.
I found lower product. It can follow-up a moving object in automatic.
This project is very interesting and similar with my project.
But my project don't have automatic tracking function. For shoot a movie, this function is not enough. Because, movie is expression. It can’t by machine.
Technique of layout of screen is very deep.
So, If we shooting cinema, camera should be moved by human intention.
Micro computer for calculate machine’s movement
Rotary encoder for detect machine’s speed
LED for indicate condition
acrylic T=3-5mm
PLA for 3D print
Gear box for Toy
Parts for tire
Micro computer : My FabLab
Rotary encoder : Internet shop "Akizuki
LED : My FabLab
acrylic T=3-5mm : DIY ceter
PLA for 3D print : My FabLab
Gear box for Toy : DIY ceter
Tire parts : DIY ceter
Micro computer :500JPY x2
Rotary encoder : 500JPY x2
LED : 50JPY*4
acrylic T=3-5mm : 1000JPY
PLA for 3D print : 1000JPY
Gear box for Toy : 800JPY x2
Tire parts : 500JPY
Rotary encoder detect rotation of tires. It connect to Micro computer.
MakingPCB : embedded programming
MakingMotorDirver : Output devices
Making Shaft holder : 3D printing
Makign body and tires.
Making running distance detect system by rotary encorders.
Making velocity control system of DC motor.
How to design control terminal?
5/25 - 5/31 : Making dirve circuit
6/1 - 6/7 : Making body and tires.debugging.
It can start movement following my power switch.