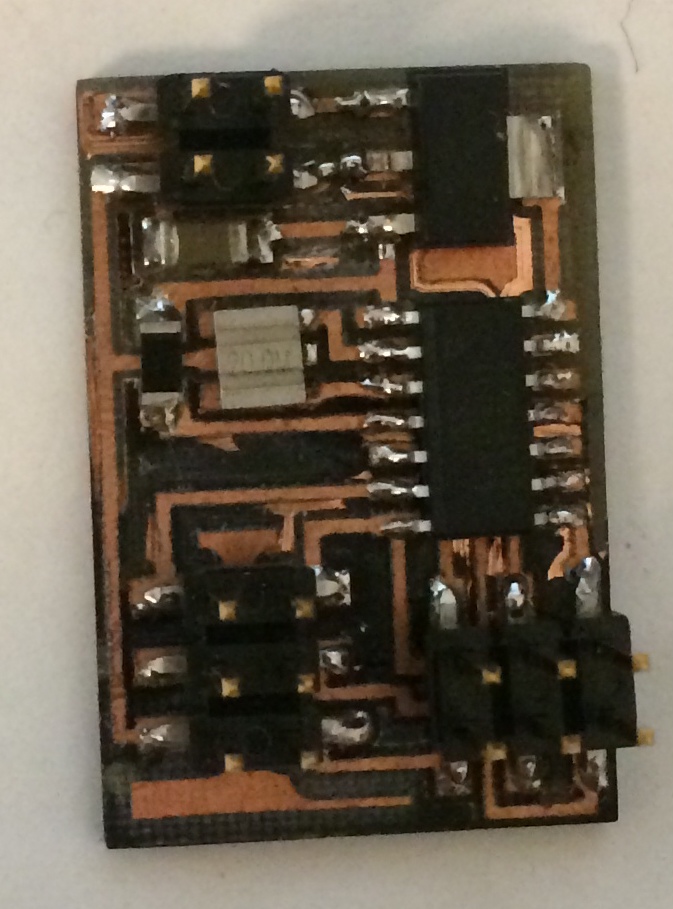
For this week I wanted to make something for my final project. A servo motor that will move the board of my game. I milled a board with place for two servos and an ultrasonic sensor. Milled and soldered.
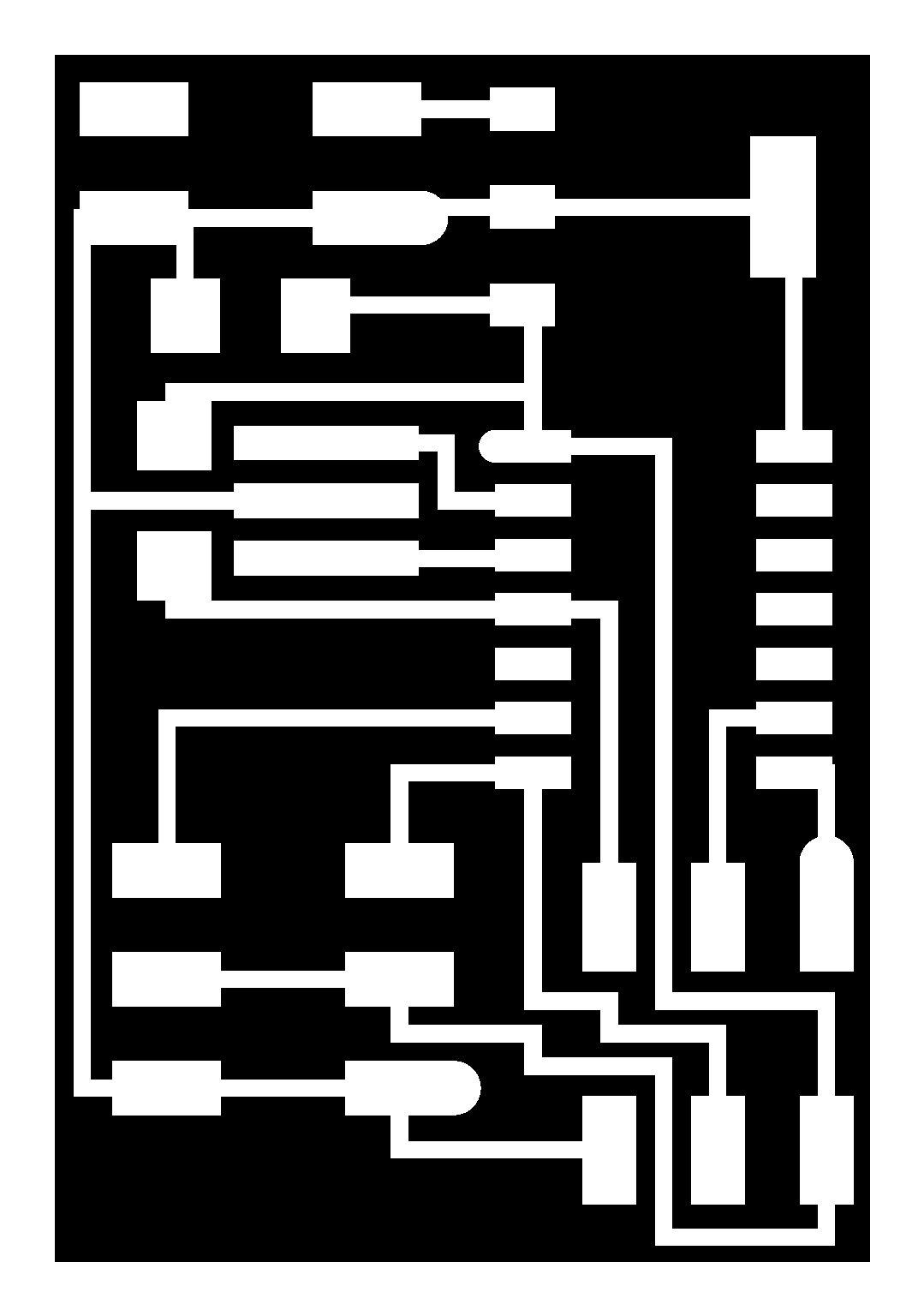
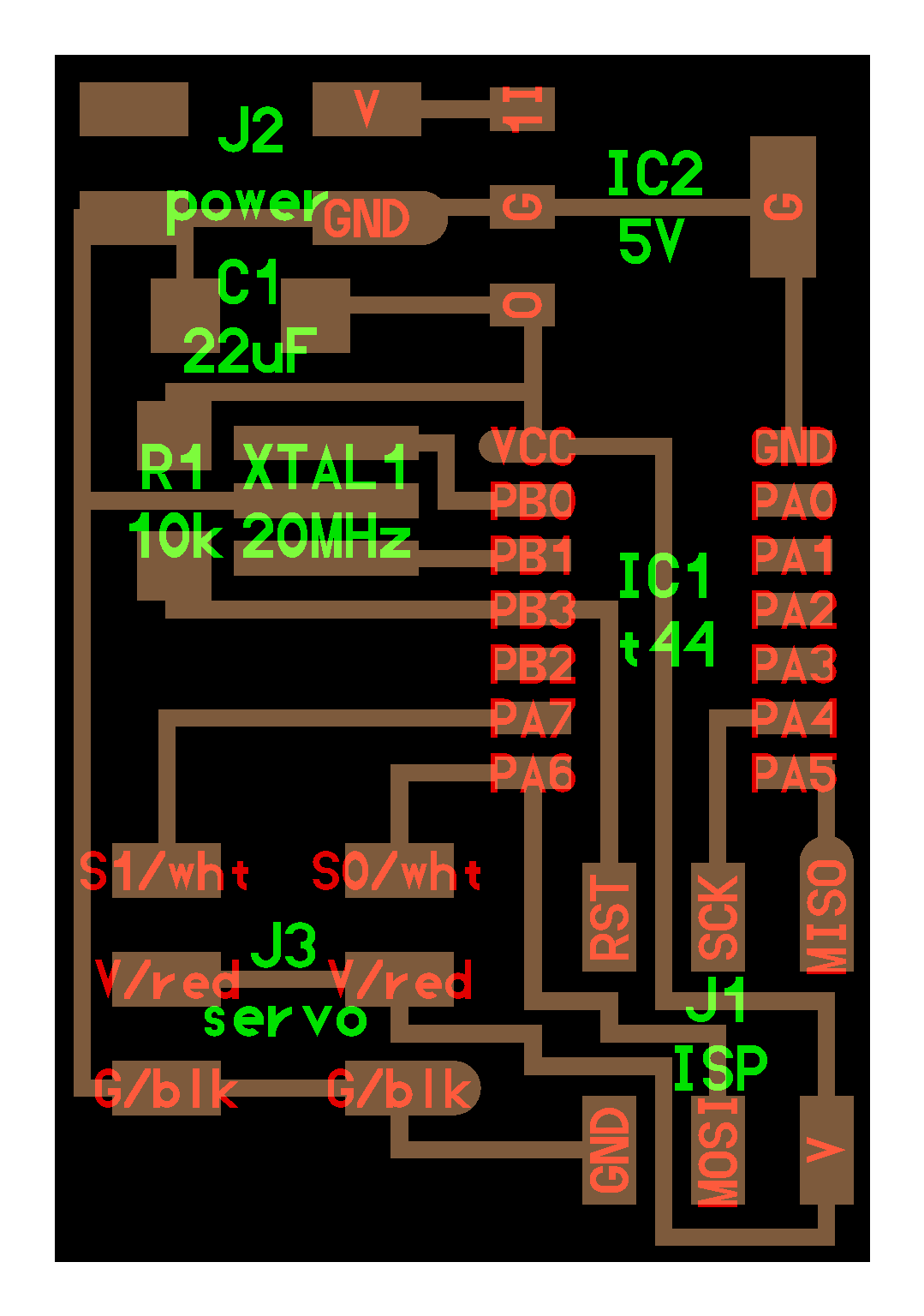
This is the list of components to solder:
Regulator LM2940IMP-5.0/NOPBCT-ND IC REG LDO 5V 1A SOT223
atTiny44 ATTONY44A-SSU-ND IC MCU 8BIT 4KB FLASH 14SDIC
20MHZ Resonator XC1109CT-ND CER RESONATOR 20.00MHZ SMD

22uF Capacitor 1276-2728-1-ND CAP CER 22uF 16V 20% X5R 1206

10K Resistor 311-10.0KFRCT-ND RES 10.0K OHM 1/4W 1% 1206 SMD
2 6 pin Headers 609-3487-1-ND BERGSTIK HDR 6POS .100" DR SMT

In order to program the AtTiny with Arduino code you need to install the Tiny for Arduino. Download the attiny-ide-1.6.x ZIP file and install according to the tutorial in the High-Low link
The code for operating a servo motor with the atTiny Chip is a bit different. Instead of using the regular servo.h library I used the SoftwareServo.h after downloading the .zip file I opened the Sketch menu->Include Library->Add .ZIP Library and browsed to the downloaded zip file.
This time I used an Arduino UNO as a programmer. Here is the Code I wrote for it.
This assignment gave me inspiration for my final project.
- © Or Shoval. All rights reserved.
- Design: HTML5 UP