wk15 | interface and application programming
Assignment :
- make a interface for a input or output device
Download : py-file - interface design
My notes :
1 may 2014 | interface in py
In week 10 I've already started with learning
how to edit a interface in py.
What I did:
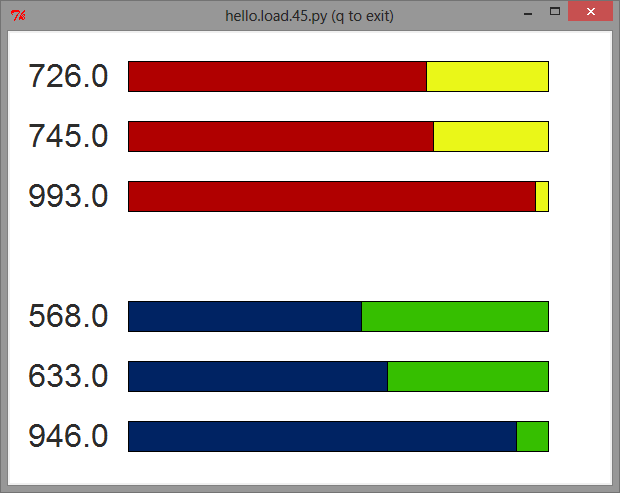
The original window displayed 3 colored beams,
representing the 3 interval measurements form a touch sensor.
But I re-designed my board, so I wished to display 6 intervals in stead of 3.
So, first step is duplicating the content from 3 to 6 intervals.
And renaming the duplicated intervals to '4' '5' and '6'.
Now the py code will calculate 6 intervals, in stead of 3.
But, the canvas coordinates are a bit more complicated.
The windows size is limited to 600 pixels
and at the moment the coordinates of interval 4,5 & 6 are overlapping the first 3.
| id = canvas.create_line(fromX, fromY, toX, toY) | # line start, stop |
| id = canvas.create_oval(fromX, fromY, toX, toY) | # two opposite box corners |
| id = canvas.create_arc( fromX, fromY, toX, toY) | # two opposite oval corners |
| id = canvas.create_rectangle(fromX, fromY, toX, toY) | # two opposite corners |
| id = canvas.create_image(250, 0, image=photo, anchor=NW) | # embed a photo |
| id = canvas.create_window(100, 100, window=widget) | # embed a widget |
| id = canvas.create_text(100, 280, text='Ham') | # draw some text |
To get all the interval visible, I've changed the coordinates of 4,5 and 6 to a lower position.
But because of the 600 pixel window limit, still not all the interval beam are visible,
because the beam itself are to thick.
So, I ended up changing all the coordinates, so all the beams are a bit smaller.
When I got the beams in the right placed, I also needed to change
the coordinates of the numbers next to the beams.
The final change was editing the colors.
So the 2 sets of intervals kinda match with the colors of the wires connected to the sensors.
2 may 2014 | small changes to py
For my final project I've made a network, so my touch sensor can talk directly to my servo board.
That means that the py interface is not necessary anymore.
But the py interface can still be helpful for debugging
What I changed is that now calculating the interval averages is done within my touch sensor instead of in py.
So, now if I want my touch sensor to still talk to the py interface,
I add the framing back in the touch sensor file.
And start up py to see the results.