Networking
Task:
design and build a wired &/or wireless network connecting at least two nodes
Description:
For my final project I would like to make the lamp standalone, for this a colleague of my told me that I could try the nRF24L01(+) 2.4GHz Wireless Transceiver. Through this communication I want to give a colour input to the lamp representing a certain need of the user (concept to be found here).
What did I do:
- Research the nRF24L01(+) 2.4GHz Wireless Transceiver
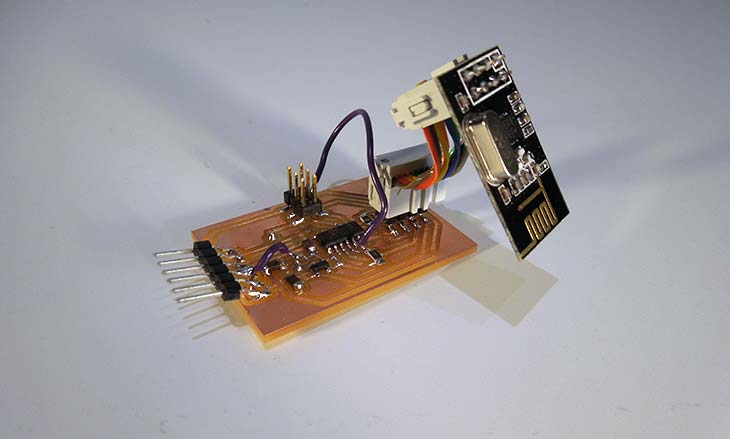
- Design two circuit boards
- Milled out boards
- Trying to program the board
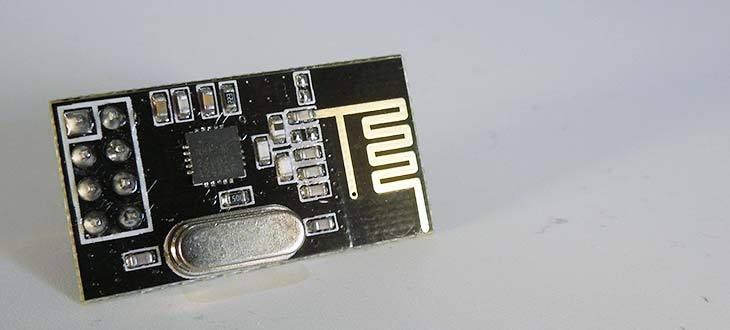
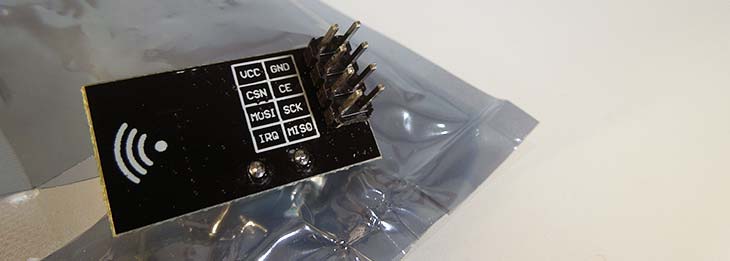
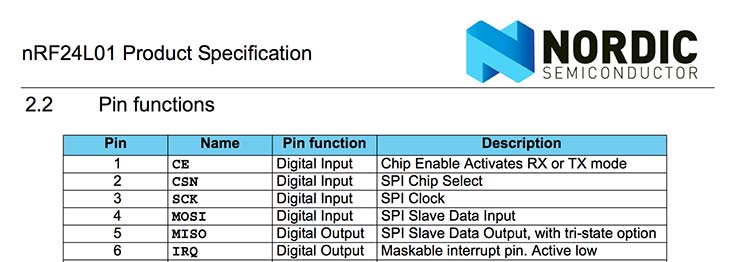
nRF24L01(+) 2.4GHz Wireless Transceiver:
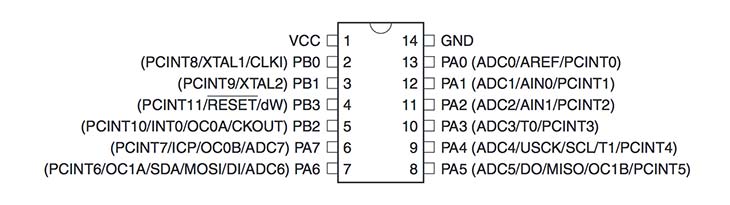
The transceiver is a pretty cheap solution for a network. The transceiver runs under a 1.9 to 3.6V supply range, which means that it works well on a coin cell, this was necessary for the standalone lamp. For the board connected to the computer I needed a 3.3v regulator. The transceiver has 6 connection pins but you can do it without the interrupt request (IRQ). I decided to use it because the attiny44 has an IRQ and I had enough pins for the other functions I needed. I checked out the mirf library for the ATTINY84 to connect the pins on the right pins.
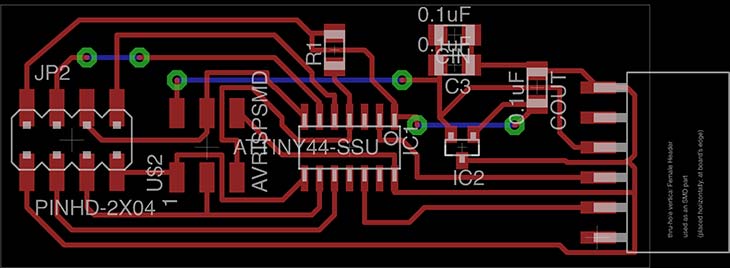
Design two circuit boards:
After checking all the connections and if I had the right amount of pins I started designing the board. I needed one board that would transmit my code to the receiver.
For the transmitter I used this components:
- ATTINY44
- 6 pin header
- 2x 4 header (cut from a 2x 5 header)
- programming header
- 3.3v Regulator
- 3x 0.1uF capacitor
- 0Ω resistor(jumper)
- 10K resistor (pull-up)
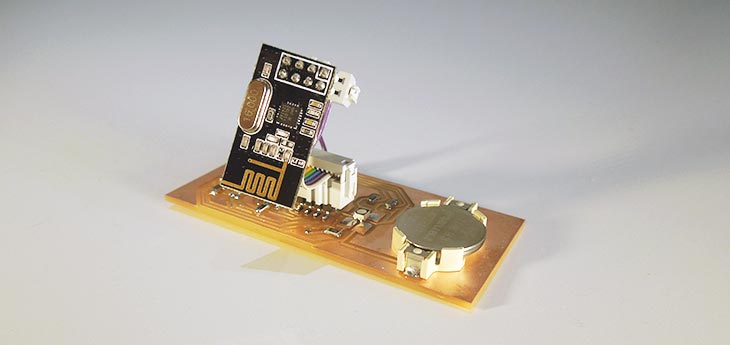
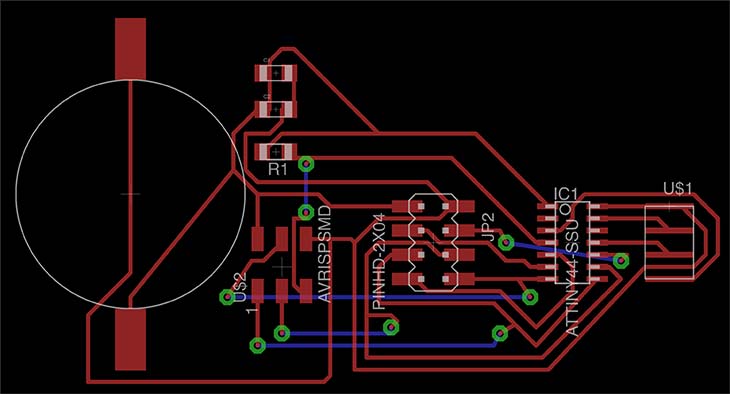
For the receiver I used this components:
- ATTINY44
- Coin cell holder
- 2x 4 header (cut from a 2x 5 header)
- programming header
- 3.3v Regulator
- 3x 0.1uF capacitor
- 0Ω resistor(jumper)
- 10K resistor (pull-up)
- RGB LED
- 3x 500Ω resistors
- I copied my other design but I forgot to take the 3.3v regulator off. I don't need the regulator anymore, because the board will use a coin cell battery. My solution a solder jumper.
I had some problems with my design in Eagle, some of the labels weren't connected well and I found out after milling and soldering the board. I redesigned my board for next time but my dirty solution for now; Wires.
Milled out boards:
The milling went not well in the first try, this because of the machine's setup. Eagle cut a little bit of my border so it did not cut out my board well. I used Photoshop to edit the image so it would be more clear for the machine.
Trying to program the board:
For the programming I used the Arduino IDE I installed the suited ATTINY core to be sure it all would work. Then installed the libraries to my Ardiuno IDE that I found here. In this package there are also a couple of example sketches that I want to try out.
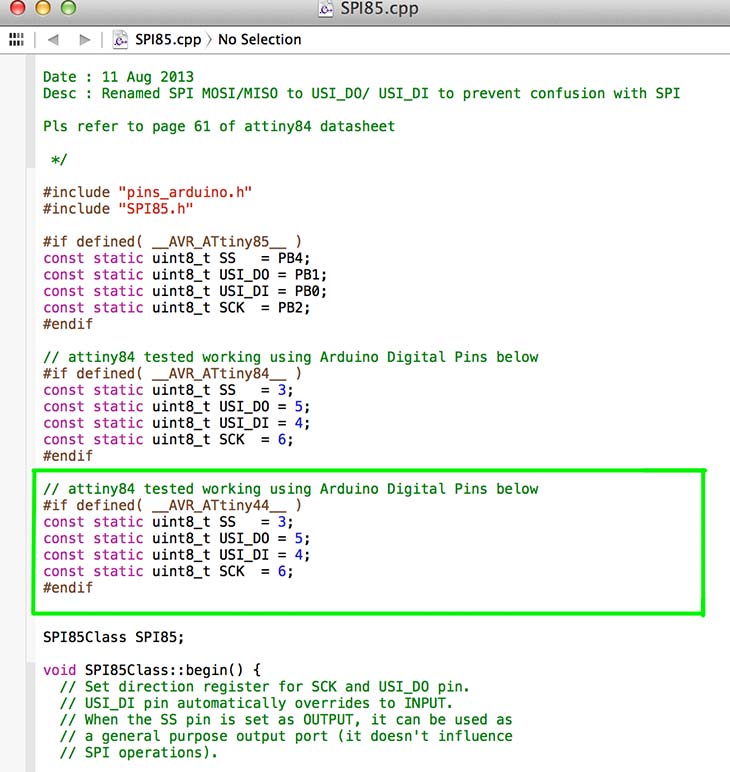
After installing all the right libraries it was time to program the board. I connected my transmitter board to my FabTinyStar and tried building the software. I got back some errors that some of the pins were not declared well. This was because in the SPI85.cpp the ATTINY44 was not declared. I changed this in the code and tried building again. It worked.
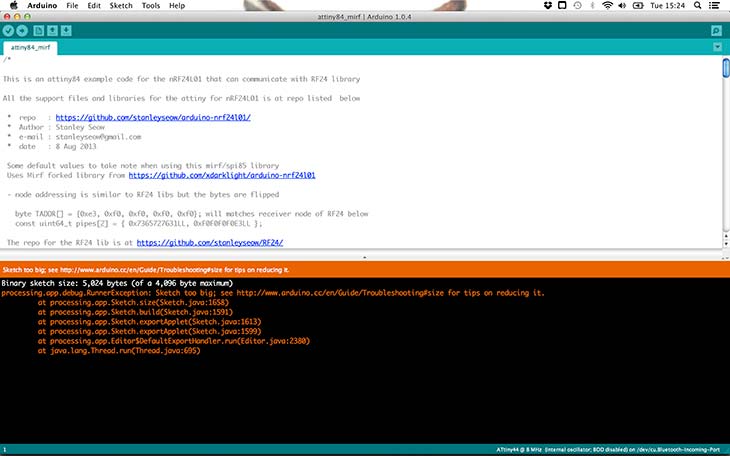
Now it was time to upload the example code to the board but unfortunately I got an error that the "Binary sketch size: 5,024 bytes (of a 4,096 byte maximum)" was too big. So I was stuck because it was already the minimum code needed for the project. I tried leaving out the debug code and it was able to write but the debug code is an important part to see if the board works. So I decided to order two ATTINY84s to replace the ATTINY44 with (I want to do this today). I forgot to make the fuses whic are very important! I did this through the Arduino IDE after installing the core packages. You can select the board and then burn the boot-loader on the board.
Assignment images:
Next steps:
- Make a board with the ATTINY 84
- Test the board
Update
After continuing to work on the two boards and programming I have been able to get the RF24 to work with the ATTINY84. I rearranged the pins in my design so they would follow the example code found here. I couldn't change certain pins because they where hard coded in the libraries so it was easier to switch some pins in the design.
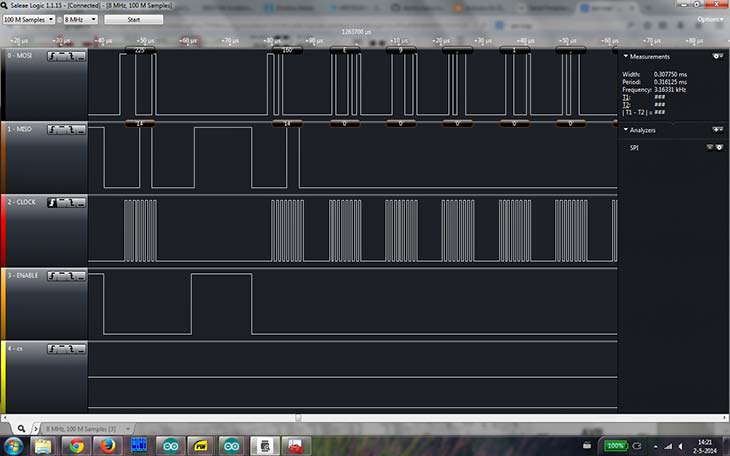
After creating the designs I soldered the components and used the code example to program the board with. The serial read was not working in my Arduino IDE and I didn't know why. I asked Dave to help me and he explained me the logic analyser so I could read out the pins on the FTDI Cable. It became clear to us we needed to switch around the MISO and MOSI and so we did by making a cable that would turn them around (we still do not know why we had to switch this around). After doing this, I was able to read out the correct data.
For the first test of the boards I used the ping_client and ping_server examples and edited it so they would work with the ATTINY84. This is something I already did for the mirf example, so this was quite easy. I just needed to set all the pins right and use the right libraries.
ping_client code
/*
* repo : https://github.com/stanleyseow/arduino-nrf24l01/
* Author : Stanley Seow
* e-mail : stanleyseow@gmail.com
* date : 8 Aug 2013
* Edited by : By Martin on 5 may 2014
Some default values to take note when using this mirf/spi85 library
Uses Mirf forked library from https://github.com/xdarklight/arduino-nrf24l01
- node addressing is similar to RF24 libs but the bytes are flipped
byte TADDR[] = {0xe3, 0xf0, 0xf0, 0xf0, 0xf0}; will matches receiver node of RF24 below
const uint64_t pipes[2] = { 0x7365727631LL, 0xF0F0F0F0E3LL };
The repo for the RF24 lib is at https://github.com/stanleyseow/RF24/
*/
#include <SPI85.h>
#include <Mirf.h>
#include <MirfHardwareSpi85Driver.h>
#include <nRF24L01.h>
// This USI was defined in SPI85.cpp
// Not to be confused with SPI (MOSI/MISO) used by ICSP pins
// Refer to page 61 of attiny84 datahseet
//
//#define USI-DO 5
//#define USI-DI 4
//#define USCK 6
#define CE 7
#define CSN 3
// ATMEL ATTINY84 / ARDUINO
//
// +-\/-+
// VCC 1| |14 GND
// SerialTx (D 0) PB0 2| |13 AREF (D 10)
// (D 1) PB1 3| |12 PA1 (D 9)
// RESET PB3 4| |11 PA2 (D 8)
// PWM INT0 (D 2) PB2 5| |10 PA3 (D 7) CE
// SS/CSN (D 3) PA7 6| |9 PA4 (D 6) USCK
// USI-DI (D 4) PA6 7| |8 PA5 (D 5) USI-DO
// +----+
int bufferSize = 0;
char buffer[32] = "";
unsigned int counter = 0;
uint8_t nodeID = 0;
void setup(){
Serial.begin( 9600 ); // for tiny_debug_serial
Mirf.cePin = CE;
Mirf.csnPin = CSN;
Mirf.spi = &MirfHardwareSpi85;
Mirf.init();
/*
* Configure reciving address.
*/
Mirf.setRADDR((byte *)"clie1");
/*
* Set the payload length to sizeof(unsigned long) the
* return type of millis().
*
* NB: payload on client and server must be the same.
*/
Mirf.payload = sizeof(unsigned long);
/*
* Write channel and payload config then power up reciver.
*/
/*
* To change channel:
*
* Mirf.channel = 10;
*
* NB: Make sure channel is legal in your area.
*/
Mirf.config();
Serial.println("Beginning ... ");
}
void loop(){
unsigned long time = millis();
Mirf.setTADDR((byte *)"serv1");
Mirf.send((byte *)&time);
while(Mirf.isSending()){
}
Serial.println("Finished sending");
delay(10);
while(!Mirf.dataReady()){
//Serial.println("Waiting");
if ( ( millis() - time ) > 1000 ) {
Serial.println("Timeout on response from server!");
return;
}
}
Mirf.getData((byte *) &time);
Serial.print("Ping: ");
Serial.println((millis() - time));
delay(1000);
}
ping_server code
/*
* repo : https://github.com/stanleyseow/arduino-nrf24l01/
* Author : Stanley Seow
* e-mail : stanleyseow@gmail.com
* date : 8 Aug 2013
* Edited by : By Martin on 5 may 2014
Some default values to take note when using this mirf/spi85 library
Uses Mirf forked library from https://github.com/xdarklight/arduino-nrf24l01
- node addressing is similar to RF24 libs but the bytes are flipped
byte TADDR[] = {0xe3, 0xf0, 0xf0, 0xf0, 0xf0}; will matches receiver node of RF24 below
const uint64_t pipes[2] = { 0x7365727631LL, 0xF0F0F0F0E3LL };
The repo for the RF24 lib is at https://github.com/stanleyseow/RF24/
*/
#include <SPI85.h>
#include <Mirf.h>
#include <MirfHardwareSpi85Driver.h>
#include <nRF24L01.h>
// This USI was defined in SPI85.cpp
// Not to be confused with SPI (MOSI/MISO) used by ICSP pins
// Refer to page 61 of attiny84 datahseet
//
//#define USI-DO 5
//#define USI-DI 4
//#define USCK 6
#define CE 7
#define CSN 3
// ATMEL ATTINY84 / ARDUINO
//
// +-\/-+
// VCC 1| |14 GND
// SerialTx (D 0) PB0 2| |13 AREF (D 10)
// (D 1) PB1 3| |12 PA1 (D 9)
// RESET PB3 4| |11 PA2 (D 8)
// PWM INT0 (D 2) PB2 5| |10 PA3 (D 7) CE
// SS/CSN (D 3) PA7 6| |9 PA4 (D 6) USCK
// USI-DI (D 4) PA6 7| |8 PA5 (D 5) USI-DO
// +----+
int ledPinRed = 10;
int ledPinGreen = 8;
int ledPinBlue = 1;
int bufferSize = 0;
char buffer[32] = "";
unsigned int counter = 0;
uint8_t nodeID = 0;
void setup(){
Serial.begin( 9600 ); // for tiny_debug_serial
Mirf.cePin = CE;
Mirf.csnPin = CSN;
Mirf.spi = &MirfHardwareSpi85;
Mirf.init();
pinMode(ledPinRed, OUTPUT);
pinMode(ledPinGreen, OUTPUT);
pinMode(ledPinBlue, OUTPUT);
Mirf.setRADDR((byte *)"serv1");
/*
* Set the payload length to sizeof(unsigned long) the
* return type of millis().
*
* NB: payload on client and server must be the same.
*/
Mirf.payload = sizeof(unsigned long);
/*
* Write channel and payload config then power up reciver.
*/
Mirf.config();
digitalWrite(ledPinRed, HIGH);
digitalWrite(ledPinBlue, HIGH);
digitalWrite(ledPinGreen, HIGH);
Serial.println("Listening...");
}
void loop(){
/*
* A buffer to store the data.
*/
byte data[Mirf.payload];
/*
* If a packet has been recived.
*
* isSending also restores listening mode when it
* transitions from true to false.
*/
if(!Mirf.isSending() && Mirf.dataReady()){
Serial.println("Got packet");
/*
* Get load the packet into the buffer.
*/
Mirf.getData(data);
if (data[0] == '1') {
digitalWrite(ledPinRed, LOW);
digitalWrite(ledPinBlue, HIGH);
digitalWrite(ledPinGreen, HIGH);
}
else if (data[0] == '2') {
digitalWrite(ledPinRed, LOW);
digitalWrite(ledPinBlue, LOW);
digitalWrite(ledPinGreen, HIGH);
}
else {
digitalWrite(ledPinRed, LOW);
digitalWrite(ledPinBlue, LOW);
digitalWrite(ledPinGreen, LOW);
}
/*
* Set the send address.
*/
Mirf.setTADDR((byte *)"clie1");
/*
* Send the data back to the client.
*/
Mirf.send(data);
/*
* Wait untill sending has finished
*
* NB: isSending returns the chip to receving after returning true.
*/
Serial.println("Reply sent.");
}
}
Conclusion:
You really have to think everything through. I still feel with every step there is a possible bump you walk into. Overall, it's really a great learning process and it's just trial and error.
Conclusion v2:
There are still some mistakes that I made in creating the circuit board (connection wise). It is really important to check your board before you start milling it. I had a mistake where I put the GND instead of the VCC on the 4 pins LED connector for my RGB breakout board.
Next steps:
- Make the serial.read work so I can send different light patterns to the server.
- Redesign the boards double sided