The task of this week was to develop the mechanism of the final project.
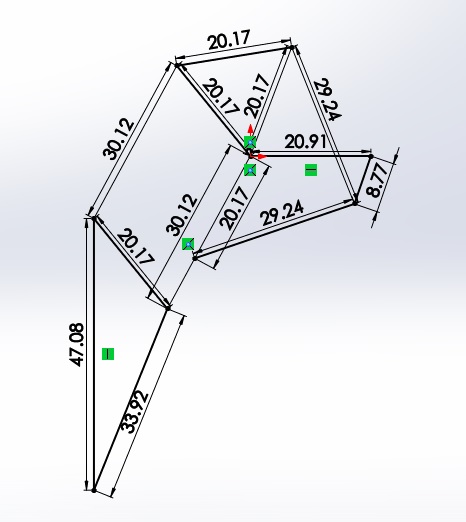
As my project is a robot that will use the mechanism of Theo Jansen, I have gone tuning the details of the pattern that I made in the task of computer aided design.
computer_aided_design.html
I have left aside the mechanism of Tamiya Gearbox that initially I would use with a motor AD because in that mechanism there are some gears that are difficult to make since they are not flat. It was more advisable to make gears with laser court and hence now I will use gears for the variation of speed.
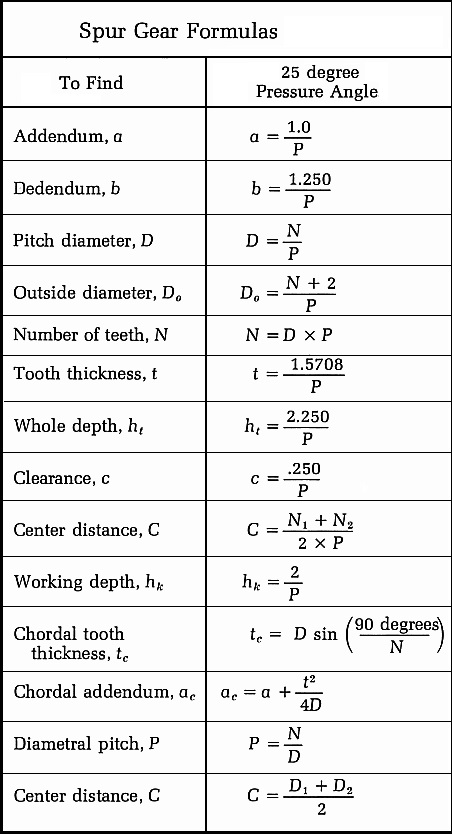
For the design of these gears, first had to understand the parameters involved in the creation of a gear.
And his equations:
Fortunately, SolidWorks count with one tab called Toolbox that allows us to create gears easily.
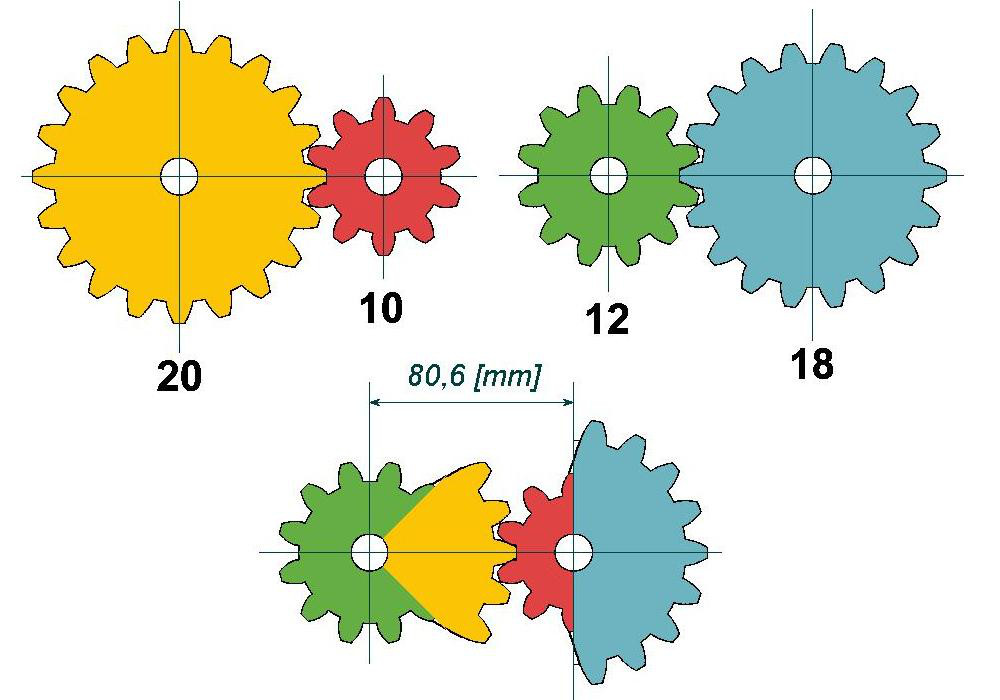
The main thing was to make that all the gears have the same module, and making an analysis of the mechanism the gears that they will transmit the movement had to have the next quantity of teeth and being armed this way.
Instead of the motor DC, I will use servomotors of continuous turn, in fact for this task I am hacking hardware, a pair of servomotors MG995.
Also, I had to vary the radio of some nodes, because I determined that the nodes for the articulations should have as measured M3 and for the axes M6.
For the manufacture I considered to use extruded acrylic of 4mm of thickness, this because the extruded acrylic maintains uniform its thickness a difference of the acrylic cast.
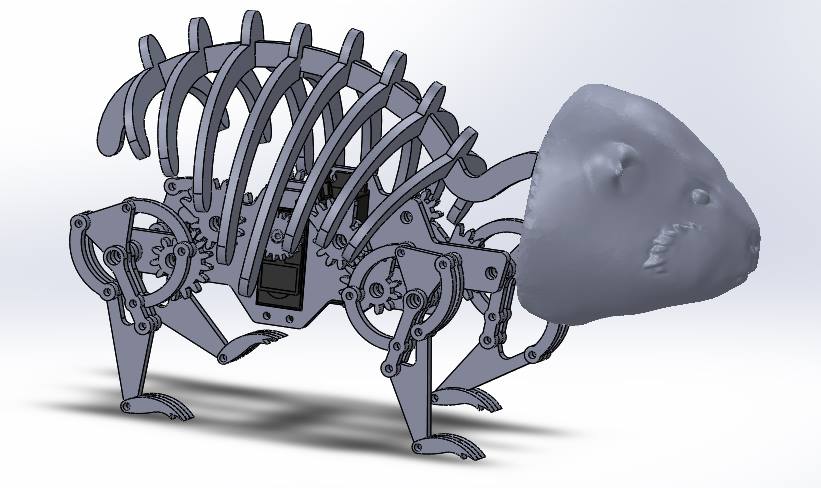
Taking into account these considerations, I passed to modify the design and the result was the following one.
I had to add a curvature a some pieces, because when changing the radio of the axes, to avoid that there is contact it was necessary to make this modification.
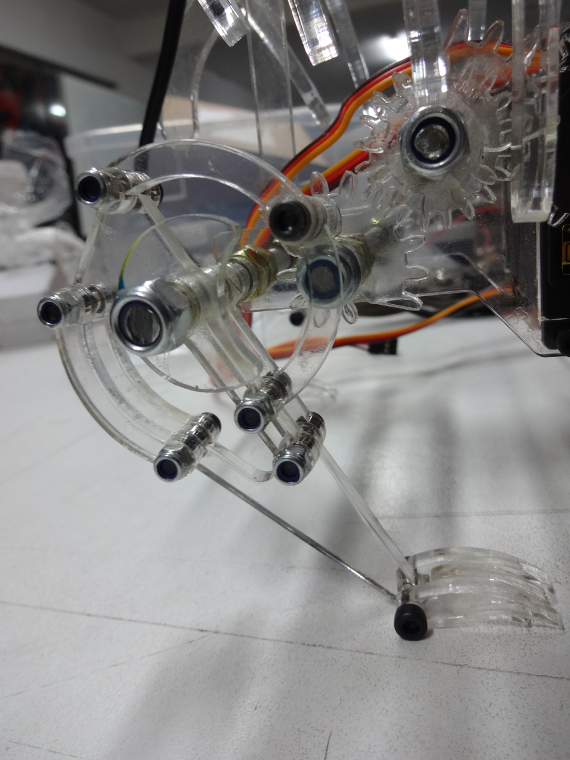
Already for the armed one I used a bar threaded for the axes (M6) with hexagonal nut, fasteners with head Allen for the nodes (M3) and nylon nuts.
So that the paws don't move with freedom, I put them a mechanical stop.
For the transmission of the movement, I used a servomotor 995 which I converted in continuous rotation.
The tricky part was to establish the amount of washers necessary to avoid that as the gears rotate these can rub and create friction between them.
About the control of the servomotor, there are some considerations:
As I turned the servo to continuous rotation, rather than control the angles controls the speed.
When we sent 90 degrees through the function write of the Servo.h library from Arduino, in reality we are telling him to stop.
When we send 0, we are telling it to move with maximum speed in a counterclockwise direction and when we sent 180 to move with maximum speed in a clockwise direction.
The basic code for the rotation of the motor is:
#include <Servo.h>
Servo miservo1;voidsetup(){
miservo1.attach(10);//Define the PWM pin
miservo1.write(120);//Send the velocity}voidloop(){}