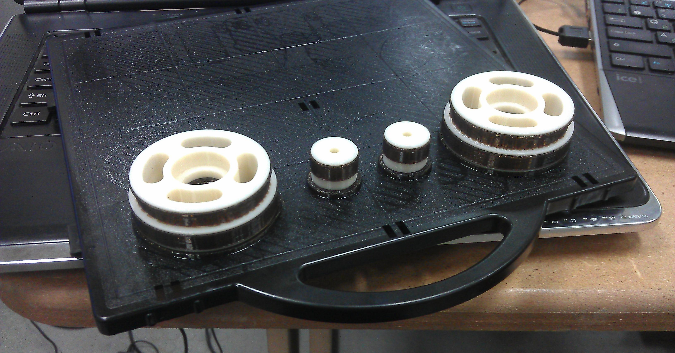
First I printed some parts for my final project. I used Solidworks to design them. Here is the transmission for the robot, printed on a Dimension Elite 3D printer:
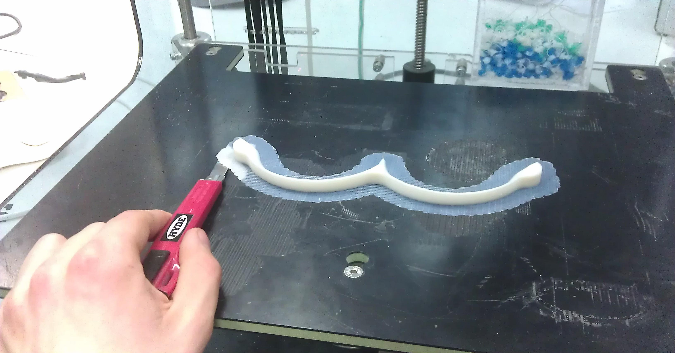
This is the part of the robot's body, printed on Bits from Bytes 3D Touch:
I also wanted to learn to use MakerBot, but it was on service.
Then I went over to scanning. Using Next Engine 3D scanner I tried to scan MIT beaver. But since he is too furry, his jacket and tail were scanned well, but not the beaver itself:

So I scanned other object - Soviet-made gearbox which my grandad lended to me:
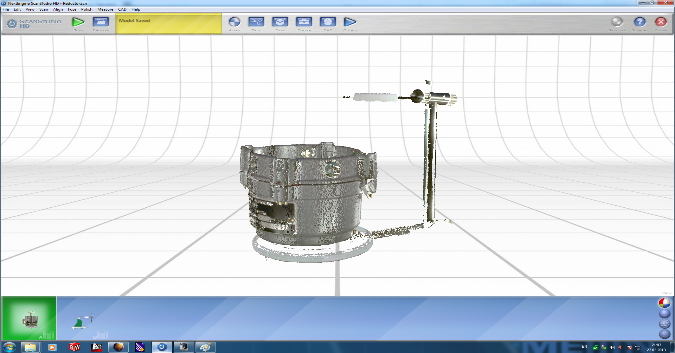
Then using the tools included to the NEXT software edited it to a more accurate model but I decided not to print it because of material consumption.
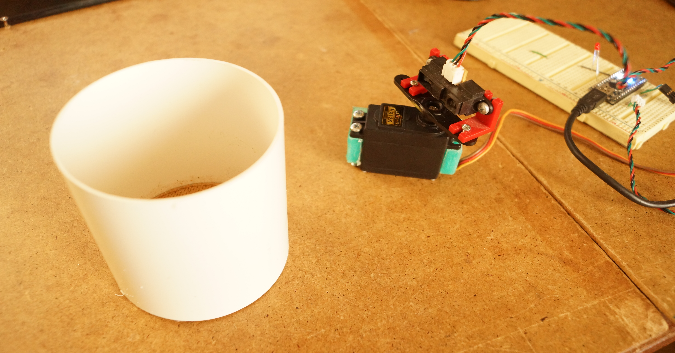
Next I wanted to try scanning with Kinect but I did'n even managed to make libfreekinect working under Linux, so I decided to try to make my own scanner. I found a post which describes how to build a cheap scanner using Arduino + Processing + Servo + IR Rangefinder (Sharp GP2D120X). I actually managed to build my own scanner. Here is the hardware setup:
Thanks to UCHobby for awesome tutorial! Link: Visualizing Sensor Data with Arduino and Processing