
week 13, apr 17
weekly assignment: add an output device to a microcontroller board and program it to do something
the tools
hardware:the idea
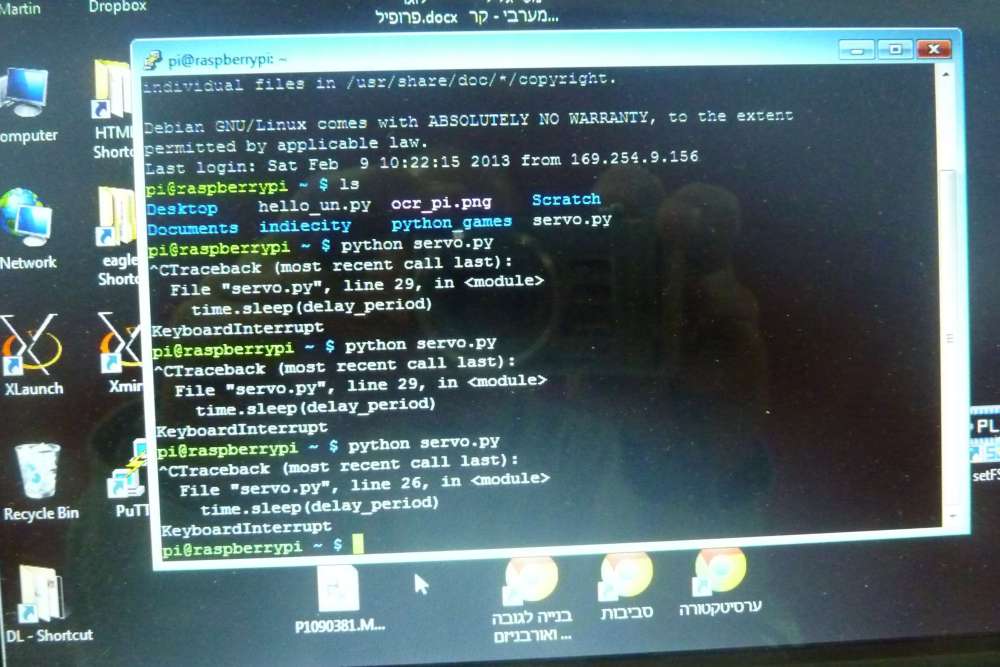
in my final project interactive installation i intend to use a raspberry pi to collect tweets and output sound and voices and maybe lights/video.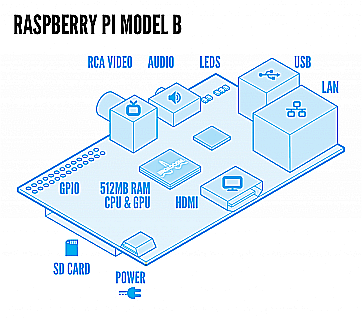 so i wanted to test the raspi and begin to set up my "system" while doing the output device's assignment.
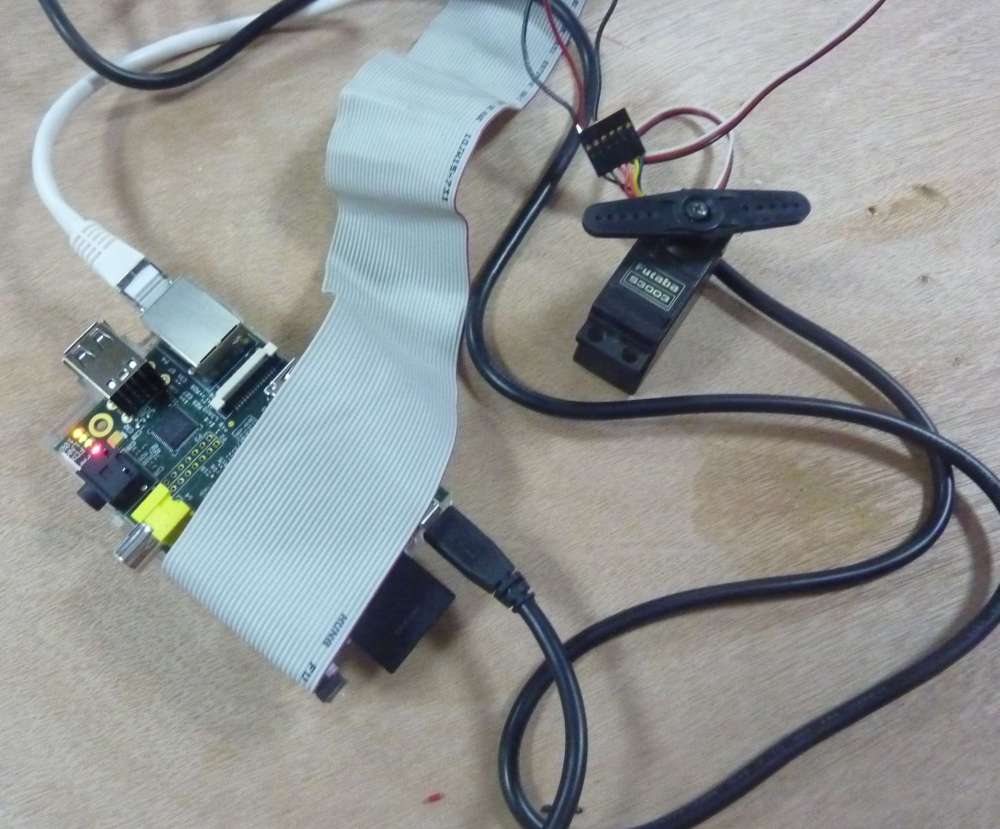
so i wanted to test the raspi and begin to set up my "system" while doing the output device's assignment.i decided to try controlling a servo motor with the raspi's GPIO pins (see picture above).
the program
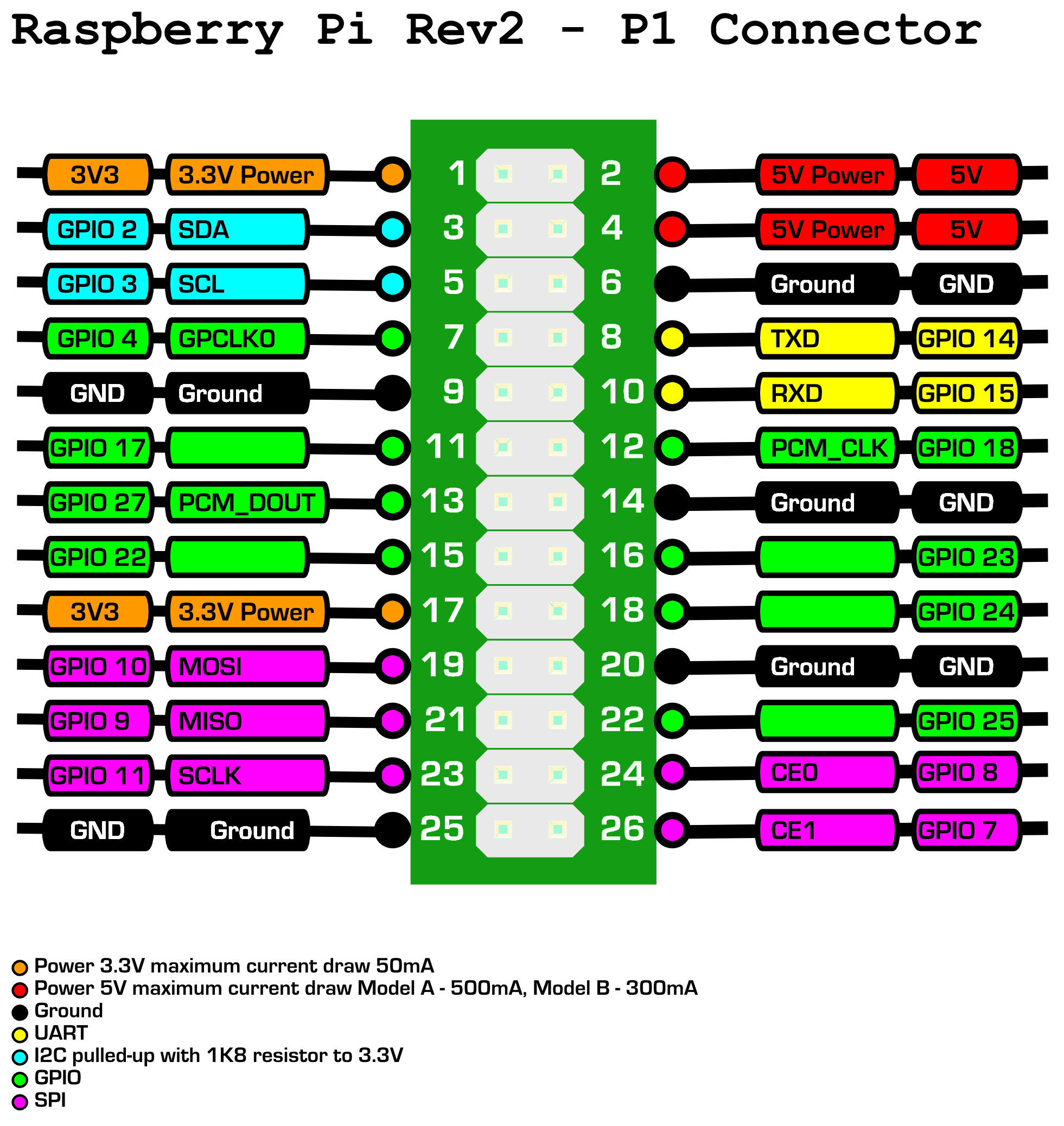
the raspi has a set of input and output pons called GPIO (general purpose input output).the only GPIO pin that can control a servo is pin 18, also called PWM, for Pulse Width Modulation
the kernel module i installed (mentioned above) uses a file type of interface, where you control what the output pin 18 and therefore the servo is doing, by reading and writing to special files, see here
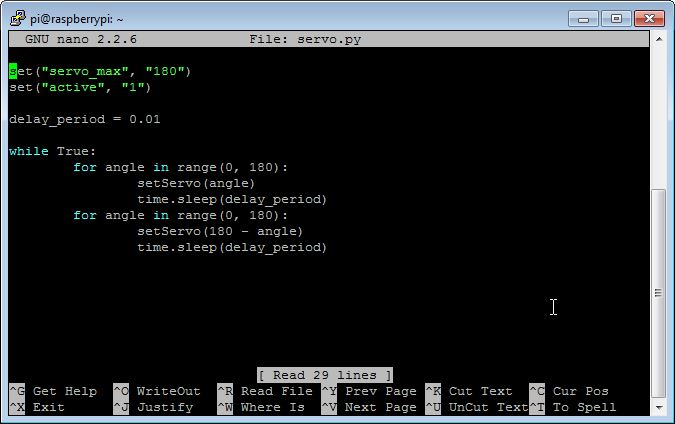
the python program used to control the servo is quite quite short and straightforward, and allows you to control angle and speed.
# Servo Control
import time
def set(property, value):
try:
f = open("/sys/class/rpi-pwm/pwm0/" + property, 'w')
f.write(value)
f.close()
except:
print("Error writing to: " + property + " value: " + value)
def setServo(angle):
set("servo", str(angle))
set("delayed", "0")
set("mode", "servo")
set("servo_max", "180")
set("active", "1")
delay_period = 0.01
while True:
for angle in range(0, 180):
setServo(angle)
time.sleep(delay_period)
for angle in range(0, 180):
setServo(180 - angle)
time.sleep(delay_period)
installing and connecting everything

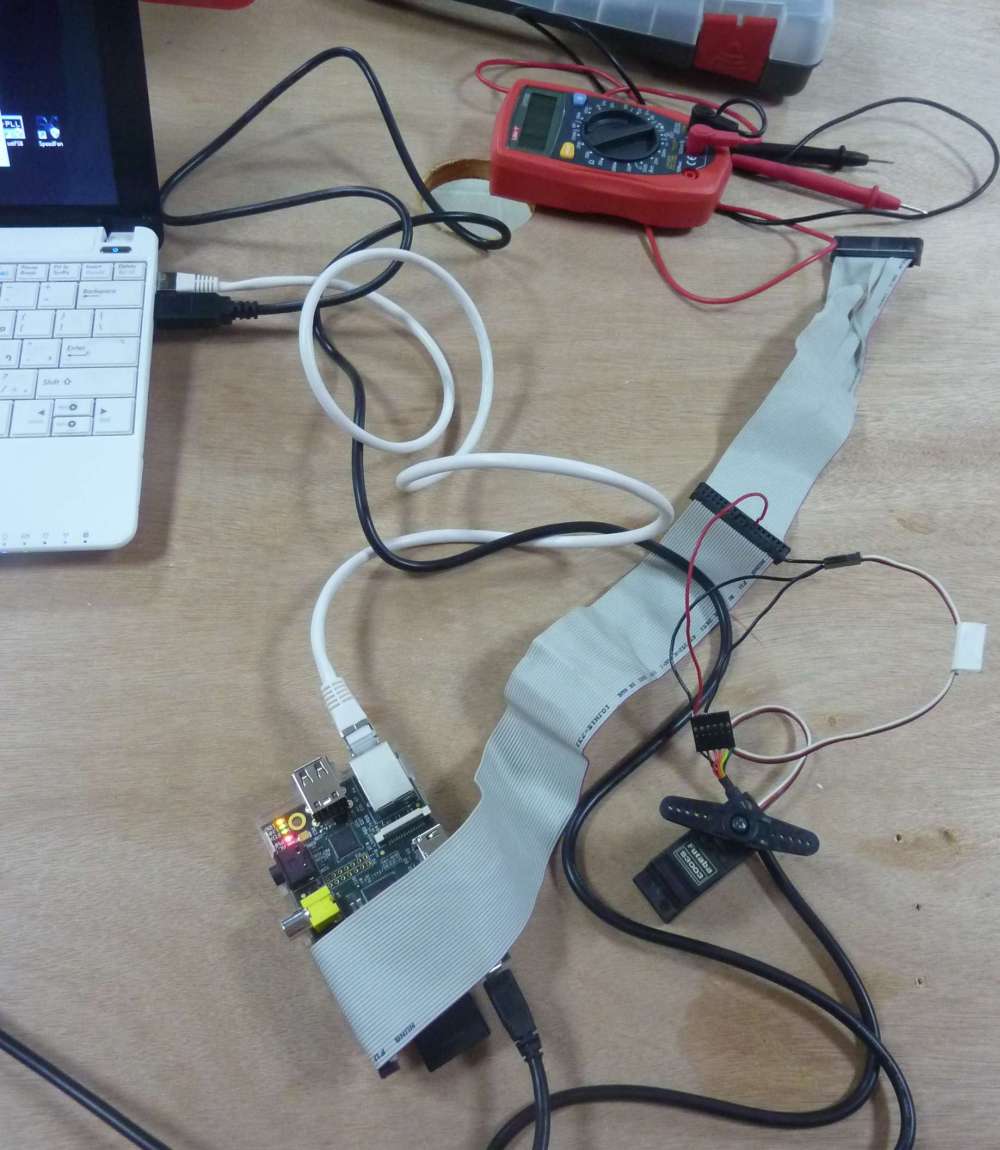
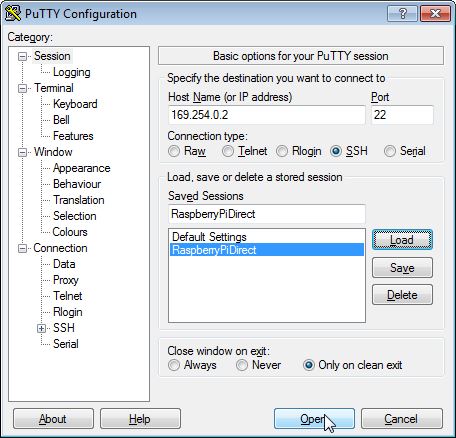
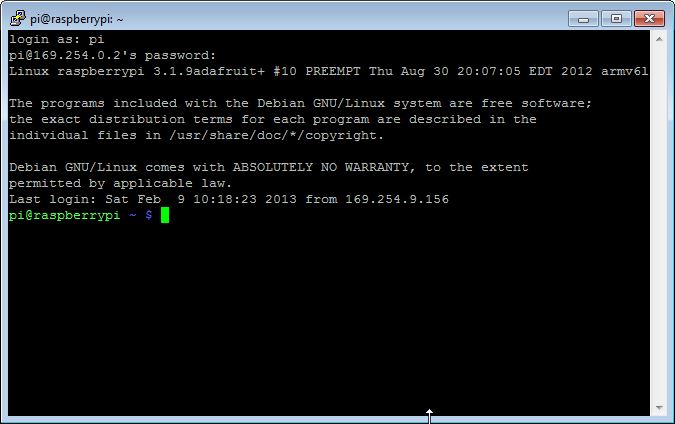
working on the raspi with PUTTY
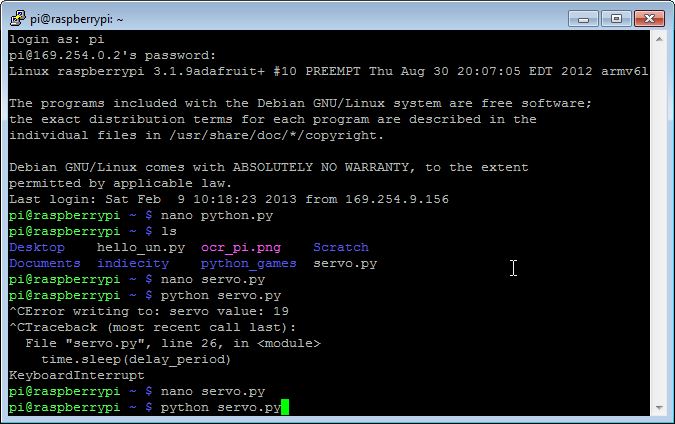
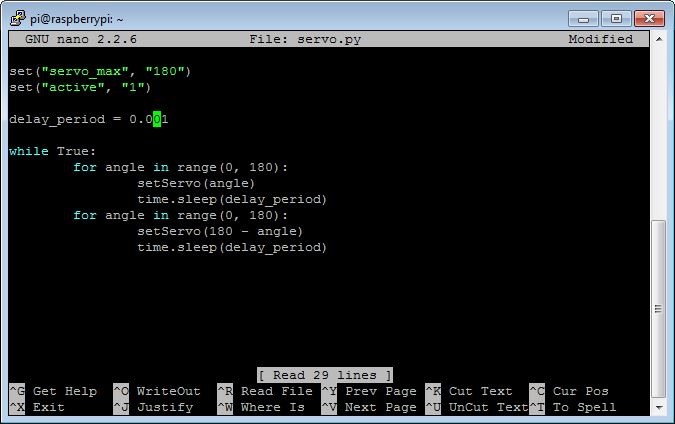
the changes to the python scriot were done in the NANO text editor
delay set to 0.01 sec - slower
delay set to 0.001 sec - faster
the results
here we can see the servo running with the delay set to 0.1 sechere we can see the servo running with the delay set to 0.001 sec