· Fab Academy 2013 ·
Waag Society's Fablab in Amsterdam
Class 15 Collaborative effort: Machine Design
By: Mio Kato, Maurice Op De Beek, Rick den Hengst, Rein den Hengst, Michael Hviid Nielsen
Mechanics
I was tasked with the mechanical works. I had to start building the prototype by hand as I was tired of waiting for the lasercutter to be repaired and the shopbot was in use. I cut multiple circles from a sheet of wood and glued these together to make crude pulleys. They were off center and I had to file them down quite a bit but it did the job. I hammered in 2 dowels for them to fit over. Finally I drilled out two holes for the stepper motors. The big-hole-drill was too big but for the prototype it fit.
At first the machine was going to be a penplotter. But after some diddling we discovered that the stepper motors were just not powerfull enough to drive the pulleys and a pen-gantry. We did manage to afix the pen at some point so that the steppers would be able to lift it (hence the drawings!) but we had to scrap that idea.
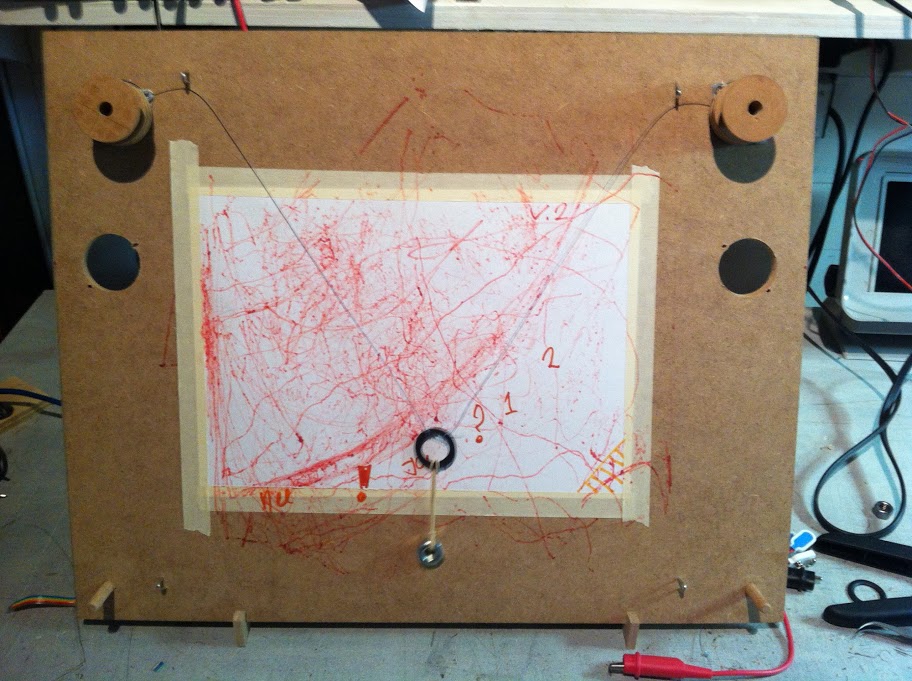
I scrapped the pulley idea and substituded the pulleys for the actual stepper motors. Eliminating the extra pulleys. With the shopbot available I designed a board with symbols and on the laser I cut a couple of new pulleys so they would center and be able to cover the stepper motors.
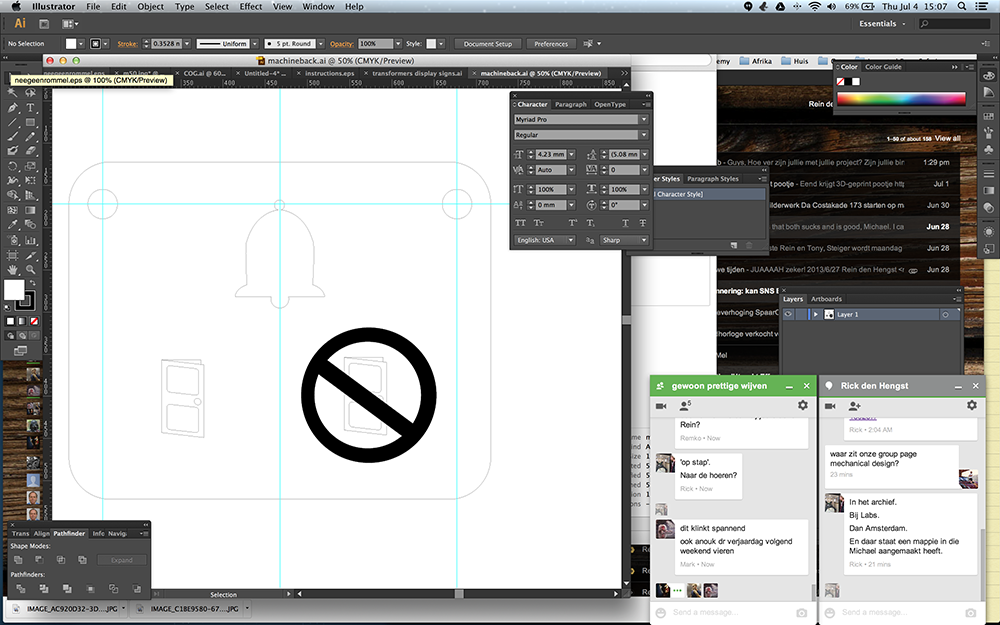
The gantry needed to be scrapped again because the stepper motors were too weak. We decided on 3 signals. "Door bell", "Door open" and "Door not opened"
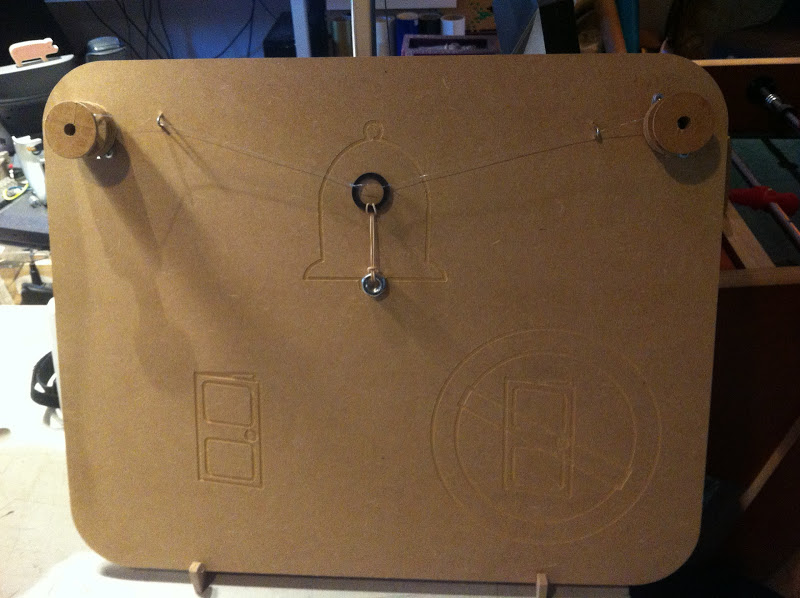
At first I used knitting yarn but that proved to flexibel and prone to breaking. I then adapted the fishing wire we had lying around. This was prone to slipping on the pulleys but it would work because of the tension. The nut is there to provide a little wait for the fishing fire to get pulled off of the pulleys when unwinding. The washer is the zero point for the symbols.