Embedded Programming
Assignment Requirements:
- Compare the performance and development workflows for different microcontroller families.
- Document your work (in a group or individually).
- Read the datasheet for the microcontroller you are programming.
- Program the board you have made to do something, with as many different programming languages and programming environments as possible.
Learning Outcomes:
Steps in General:
- Step(1): Comparing the performance and development workflows for different microcontroller families.
- Step(2): Reading the ATtiny44 Datasheet.
- Step(3): Programing the board using Arduino C.
- Step(4): Burning the code using AVRDUDESS.
- Step(5): Programming the board using C Language
Steps in Details:
Step(1): Comparing the performance and development workflows for different microcontroller families.
- In this assignment we compared the performance between the ATtiny44, ATtiny85 and Arduino Uno board.
- We used the Arduino IDE for C and Arduino C programming and display the frequency on the oscilliscope.
- Documentation of these comparision in our here group assignment page.
Step(2): Reading the ATtiny44 Datasheet.
- Datasheet is a document which includes the technical specifications and performance of a component, material or system to be used by designers/developpers to be able to operate the component/system and intergare it with other subsystems.
- I selected the ATtiny44 to read and explore its datasheet and made a summary of the main features and specs as follows:
- High Performance, Low Power AVR® 8-Bit Microcontroller.
- Advanced RISC Architecture:
- 120 Powerful Instructions – Most Single Clock Cycle Execution.
- 32 x 8 General Purpose Working Registers.
- Fully Static Operation.
- Non-Volatile Program and Data Memories:
- 2/4/8K Bytes of In-System Programmable Program Memory Flash.
- 128/256/512 Bytes of In-System Programmable EEPROM.
- 128/256/512 Bytes of Internal SRAM.
- Data Retention: 20 years at 85°C / 100 years at 25°C.
- Programming Lock for Self-Programming Flash & EEPROM Data Security.
- Operating Voltage:
- 1.8 – 5.5V for ATtiny24V/44V/84V.
- 2.7 – 5.5V for ATtiny24/44/84.
- I/O and Packages:
- Available in 20-Pin QFN/MLF & 14-Pin SOIC and PDIP.
- Twelve Programmable I/O Lines.
- Peripheral Features:
- One 8-Bit and One 16-Bit Timer/Counter with Two PWM Channels, Each.
- Programmable Watchdog Timer with Separate On-chip Oscillator.
- On-chip Analog Comparator.
- Universal Serial Interface.
- Special Microcontroller Features:
- debugWIRE On-chip Debug System.
- In-System Programmable via SPI Port.
- Internal and External Interrupt Sources: Pin Change Interrupt on 12 Pins.
- Programmable Brown-out Detection Circuit.
- Internal Calibrated Oscillator.
- On-chip Temperature Sensor.
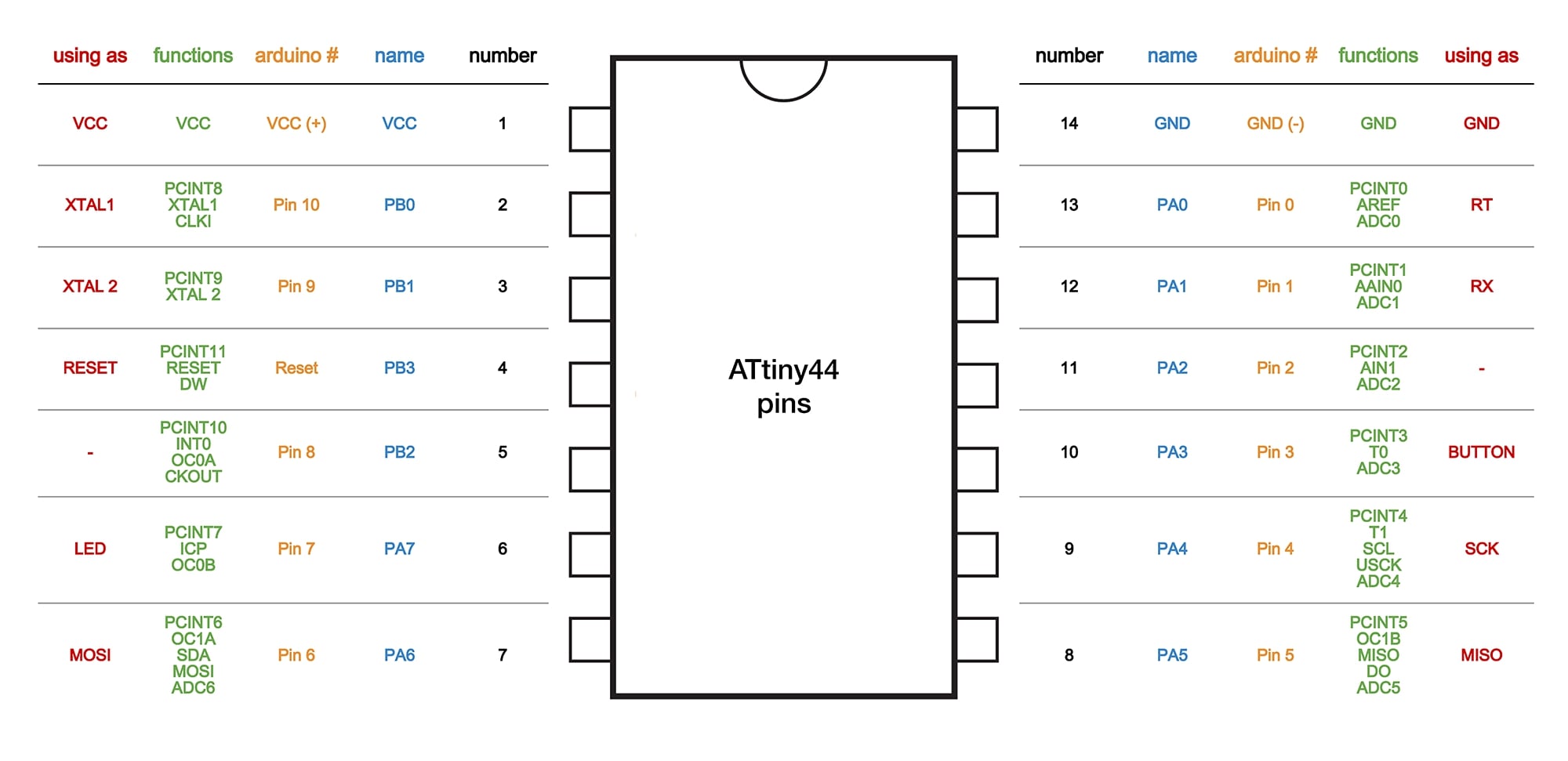
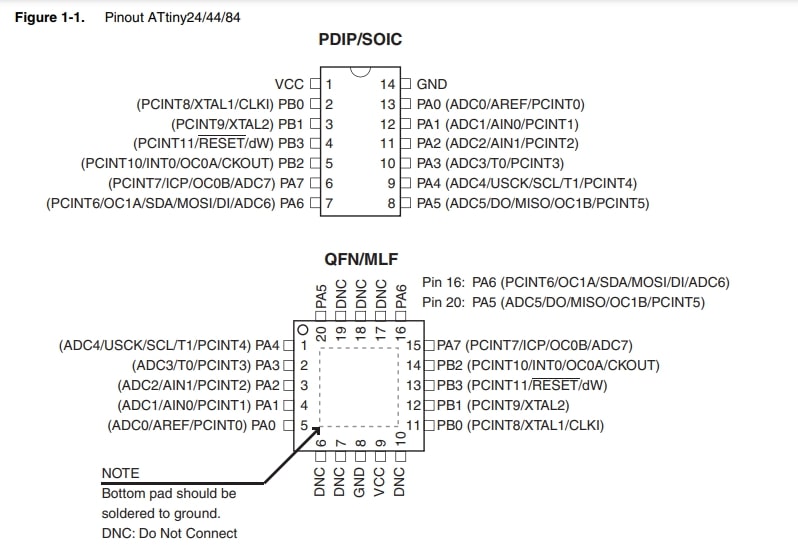
- Pin Configurations:
- VCC: Supply voltage.
- GND: Ground.
- Port B (PB3:PB0): Port B is a 4-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port B output buffers have symmetrical drive characteristics with both high sink and source capability except PB3 which has the RESET capability. To use pin PB3 as an I/O pin, instead of RESET pin, program (‘0’) RSTDISBL fuse. As inputs, Port B pins that are externally pulled low will source current if the pull-up resistors are activated. The Port B pins are tri-stated when a reset condition becomes active, even if the clock is not running.
- RESET: Reset input. A low level on this pin for longer than the minimum pulse length will generate a reset, even if the clock is not running and provided the reset pin has not been disabled. The minimum pulse length is given in Table 20-4 on page 177. Shorter pulses are not guaranteed to generate a reset. The reset pin can also be used as a (weak) I/O pin.
- Port A (PA7:PA0): Port A is a 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port A output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port A pins that are externally pulled low will source current if the pull-up resistors are activated. The Port A pins are tri-stated when a reset condition becomes active, even if the clock is not running
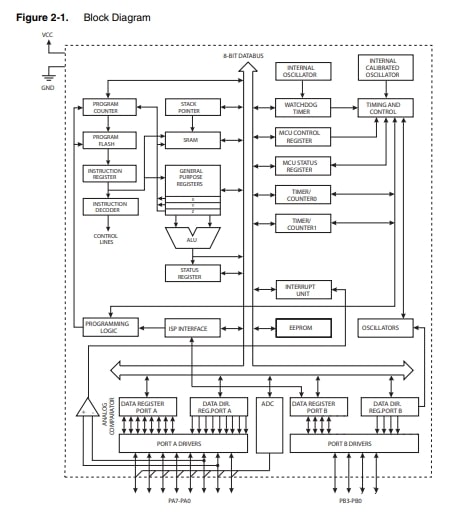
- Block Diagram of Internal Structure:
ATtiny24/44/84 is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle, the ATtiny24/44/84 achieves throughputs approaching 1 MIPS per MHz allowing the system designer to optimize power consumption versus processing speed.
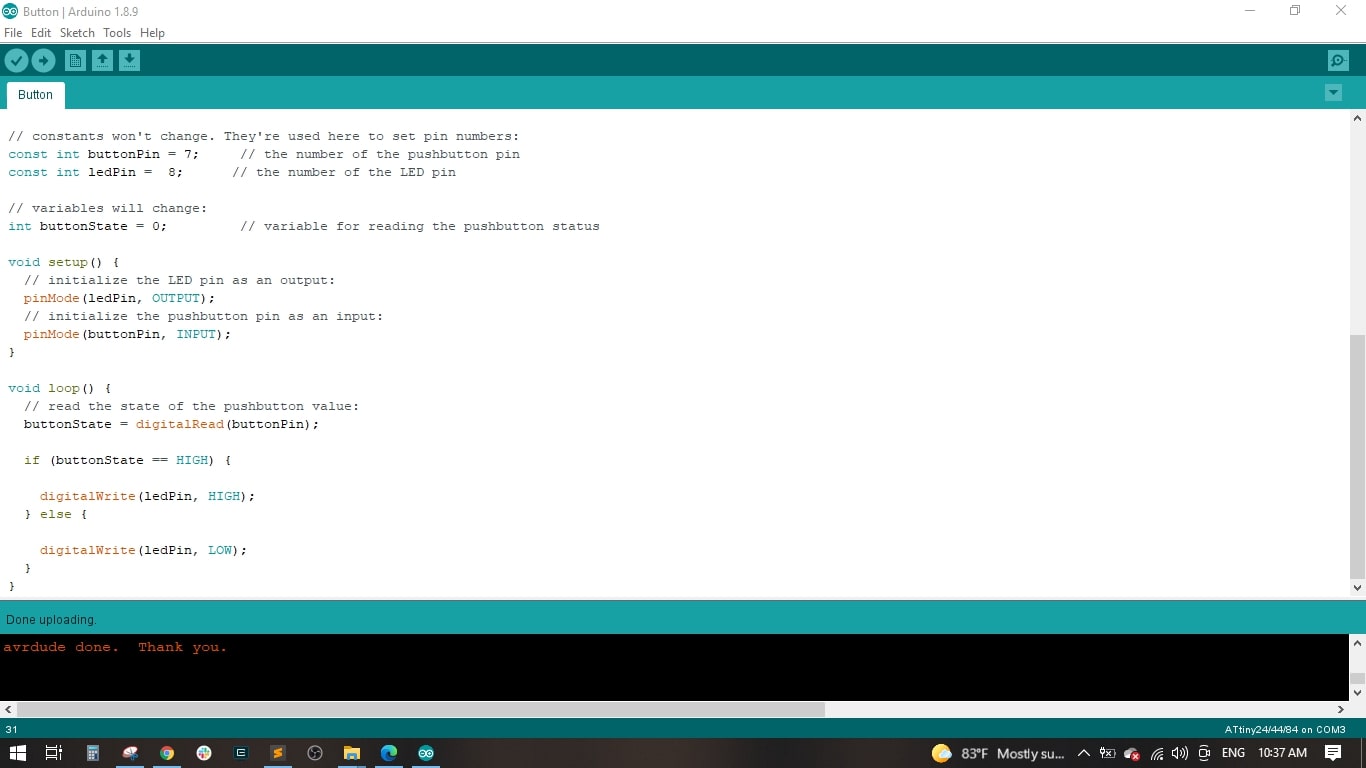
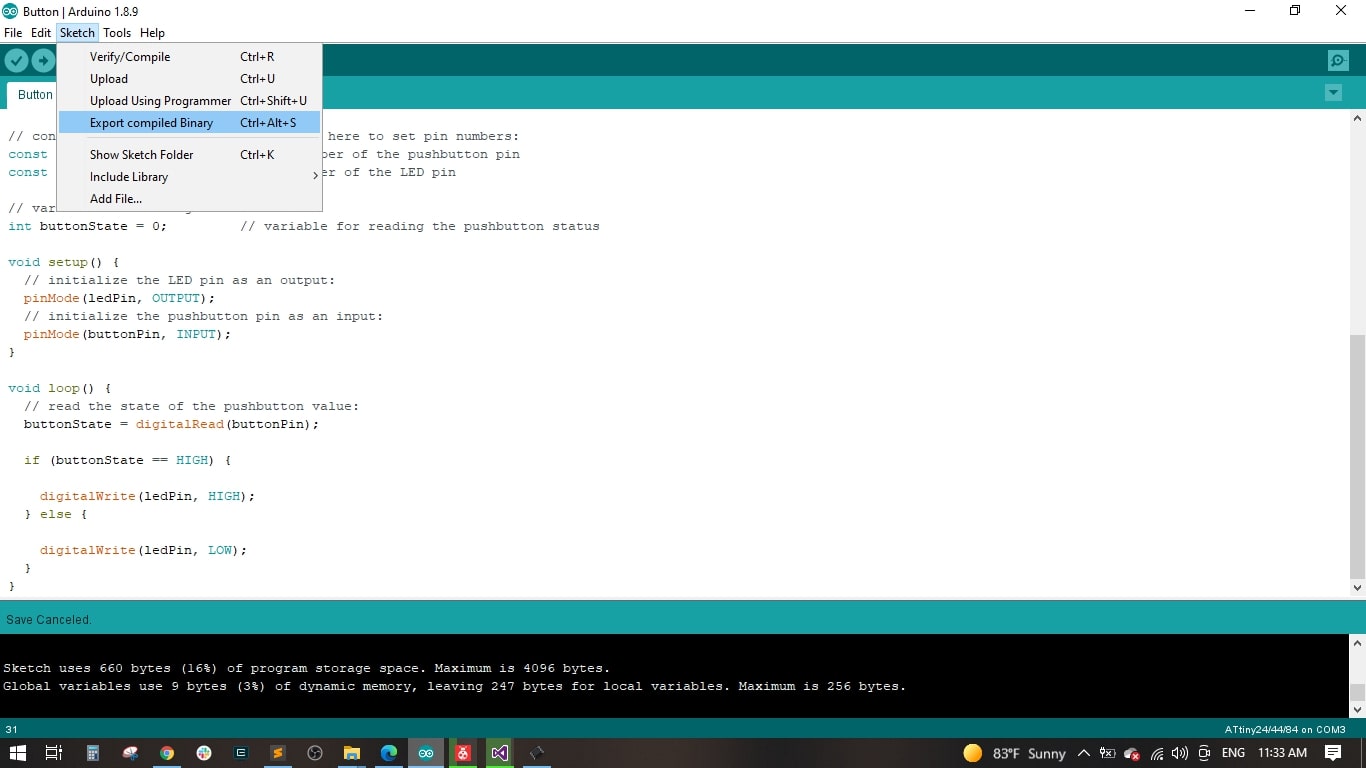
Step(3): Programing the board using Arduino IDE:
- I connected the board (that I made in the electronics production week) to my laptop through the USBasp.
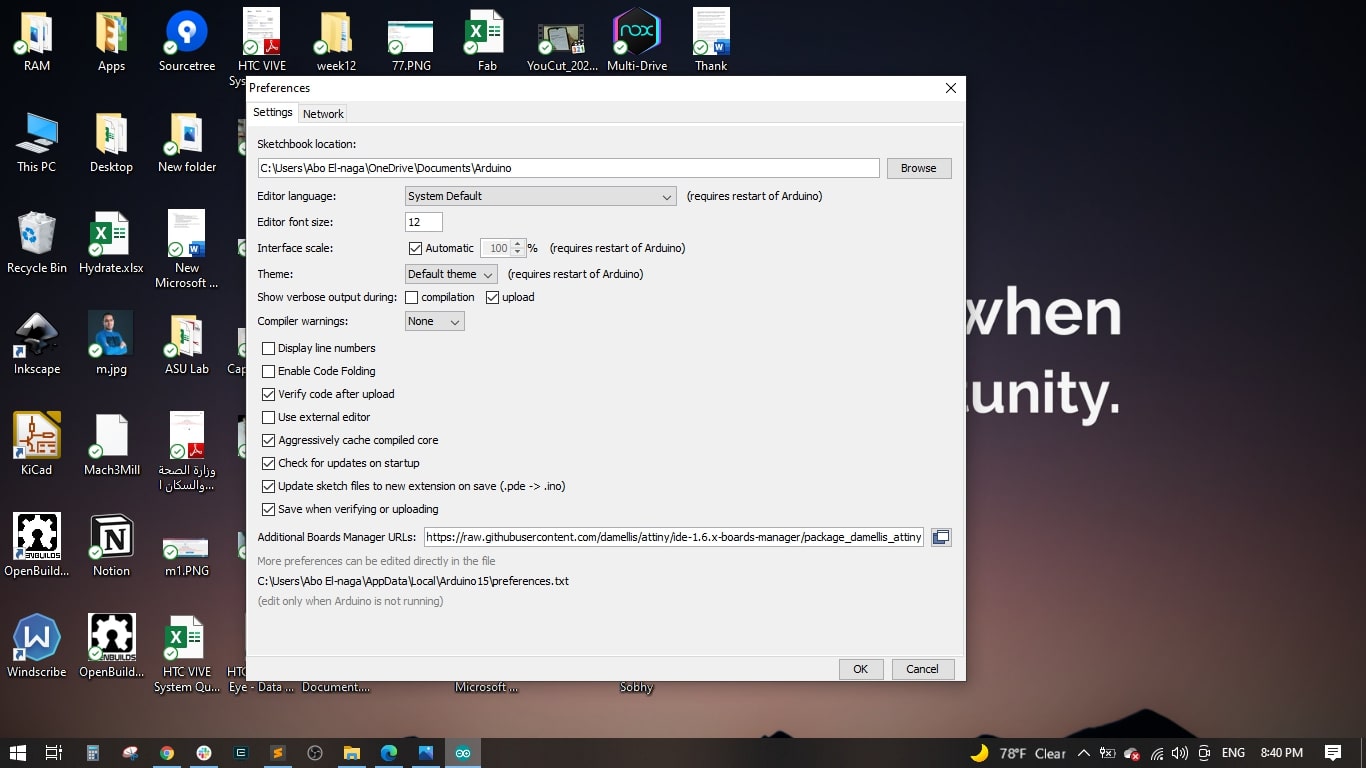
- I opened the Arduino IDE, Opened File > Preferences and pasted this URL "https://raw.githubusercontent.com/damellis/attiny/ide-1.6.x-boards-manager/package_damellis_attiny_index.json" into the Additional Boards Manager URLs and pressed OK
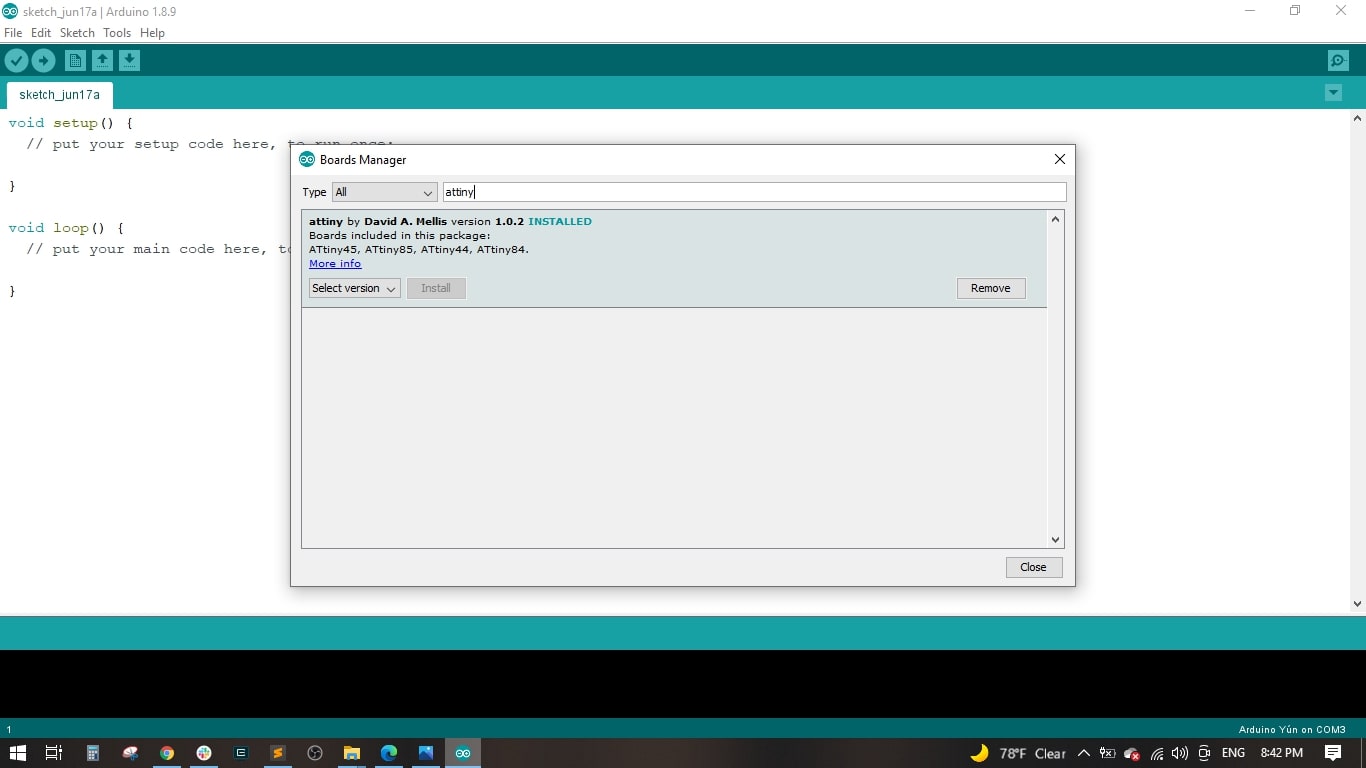
- Opened Tools > Board > Boards Manager and searched for attiny by David A. Mellis and installed it.
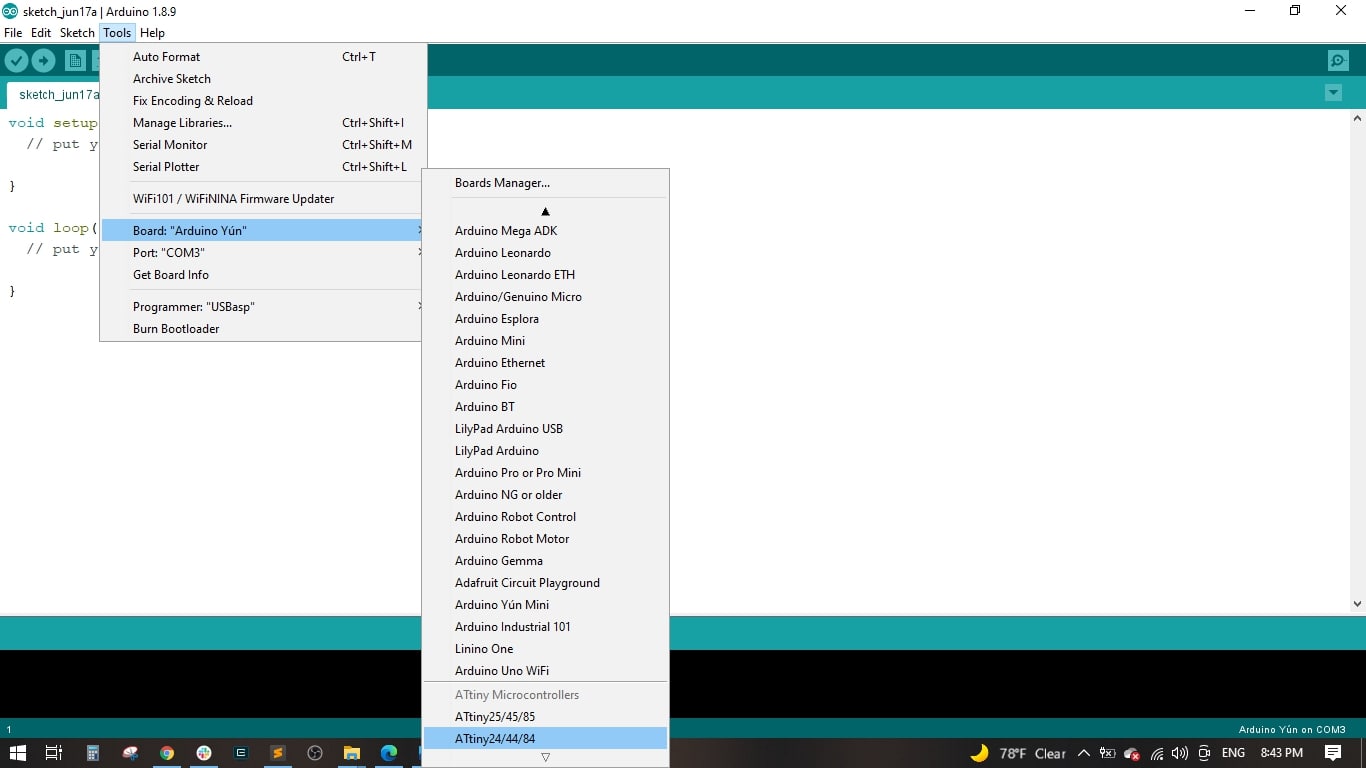
- From Tools, I selected the ATtiny 44 as the used board.
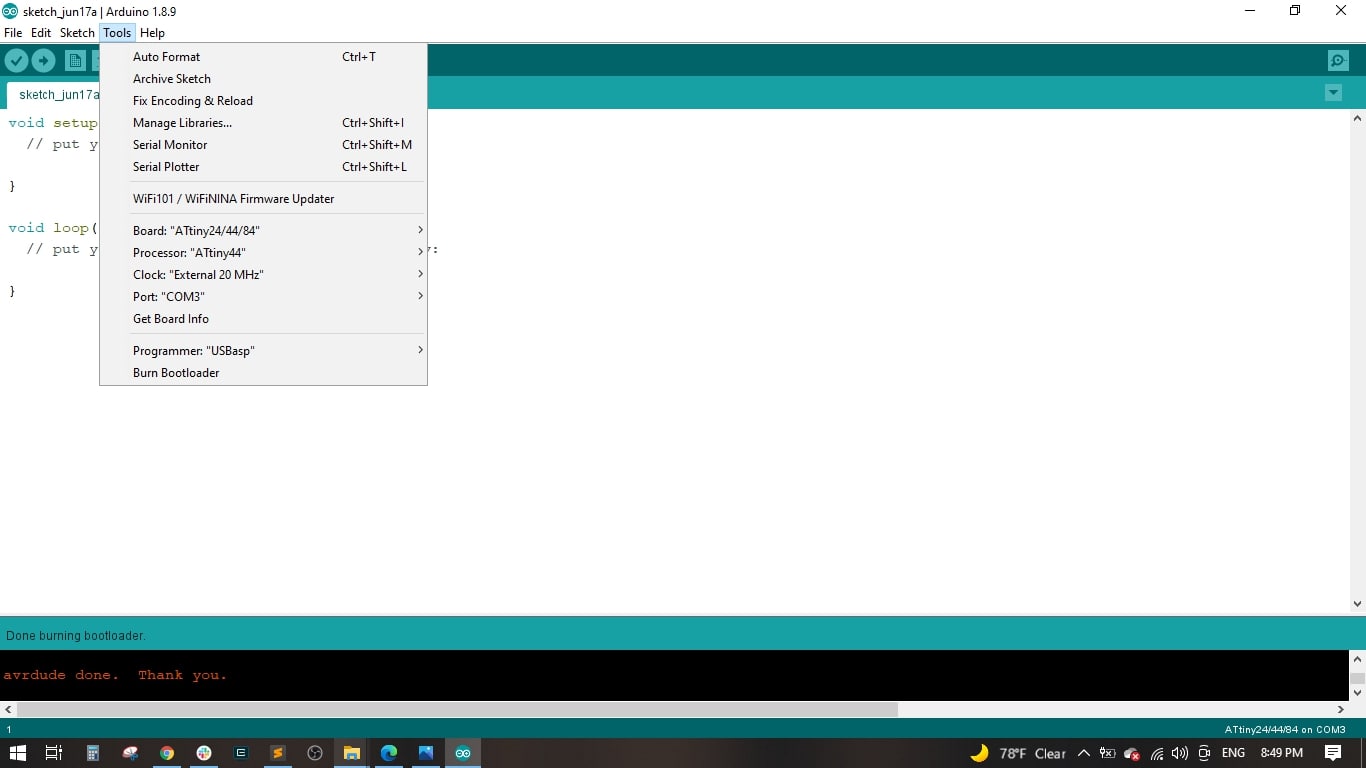
- Set the processor to ATtiny44, Clock to External 20 MHz, selected the used port, Programmer to USBasp.

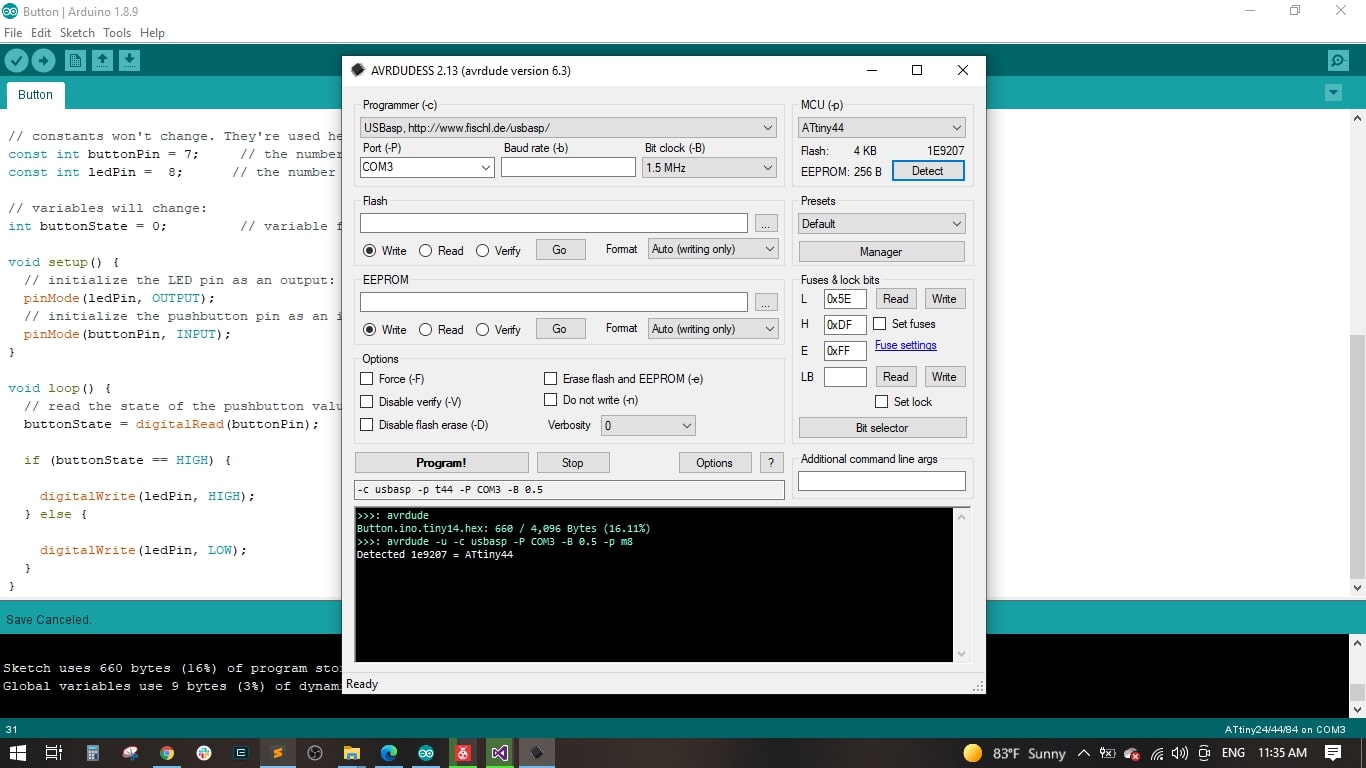
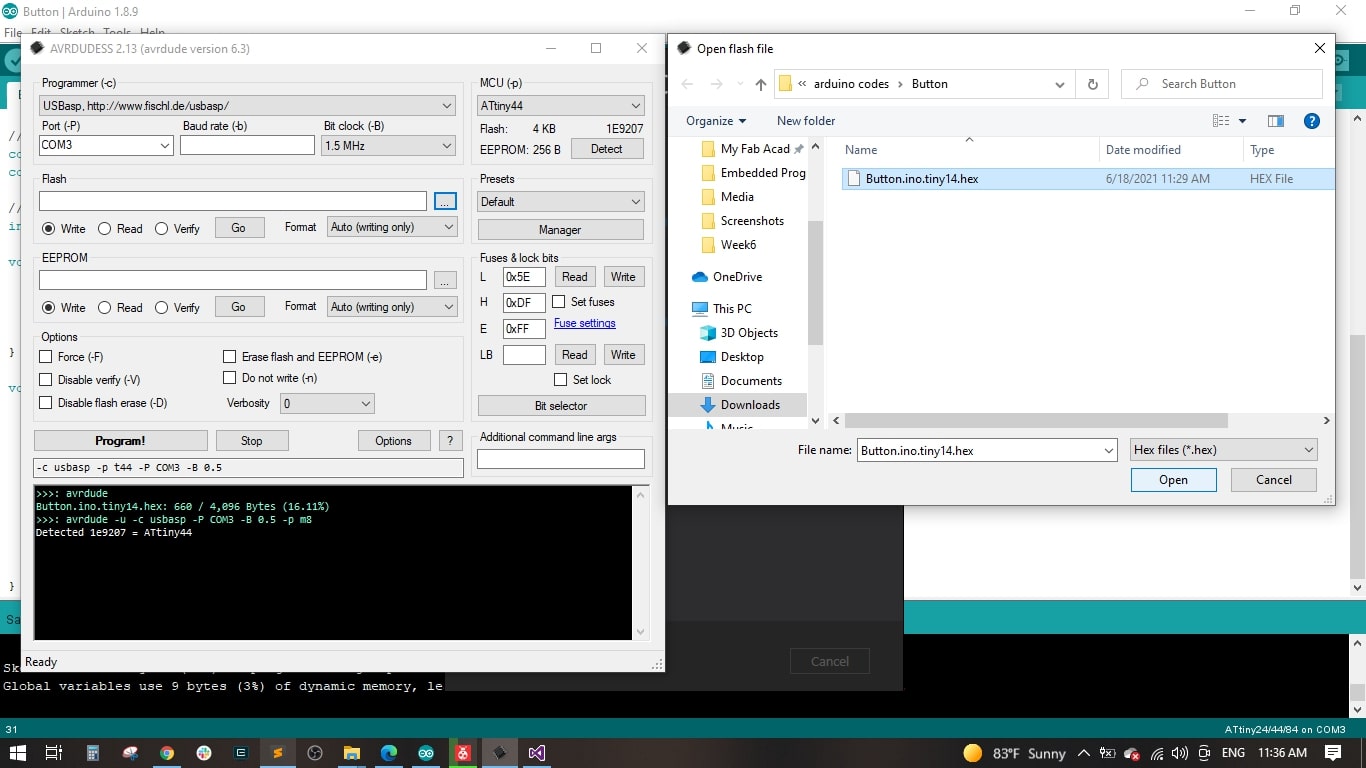
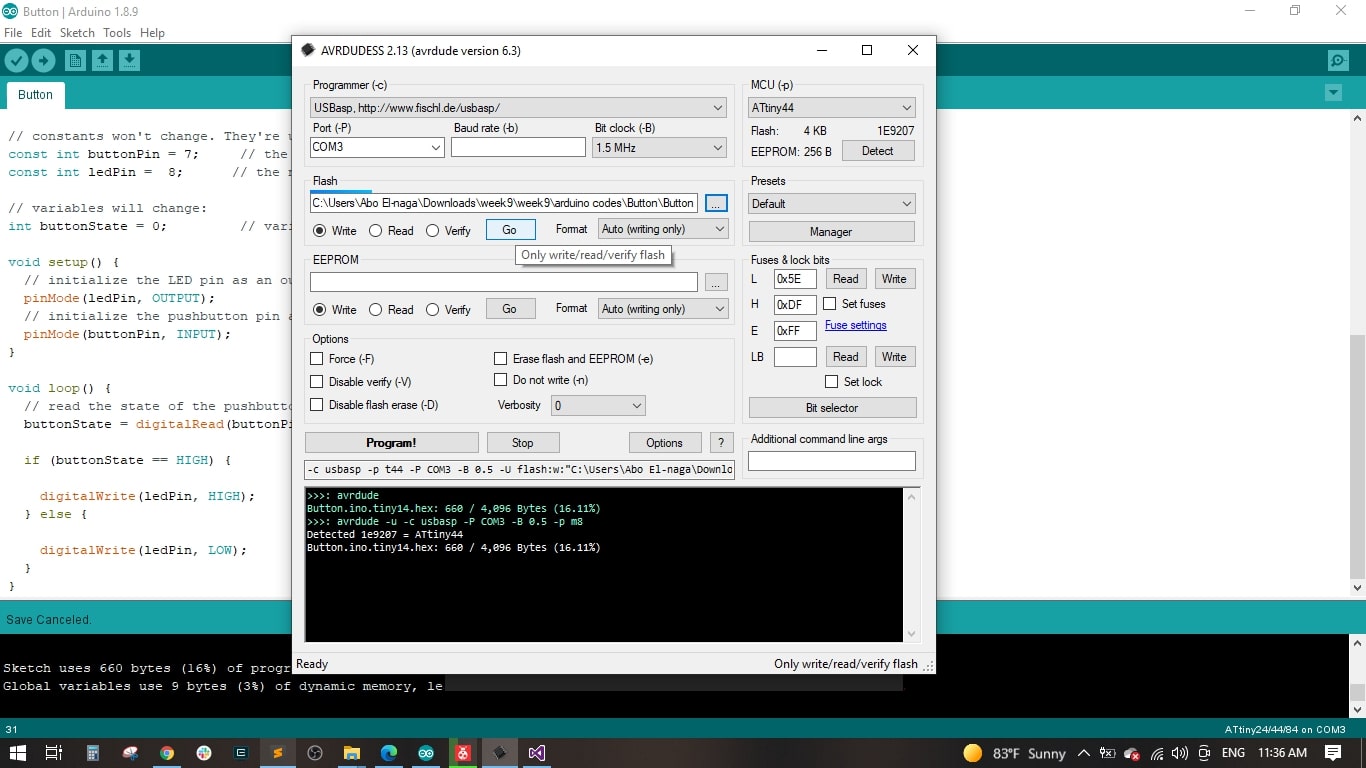
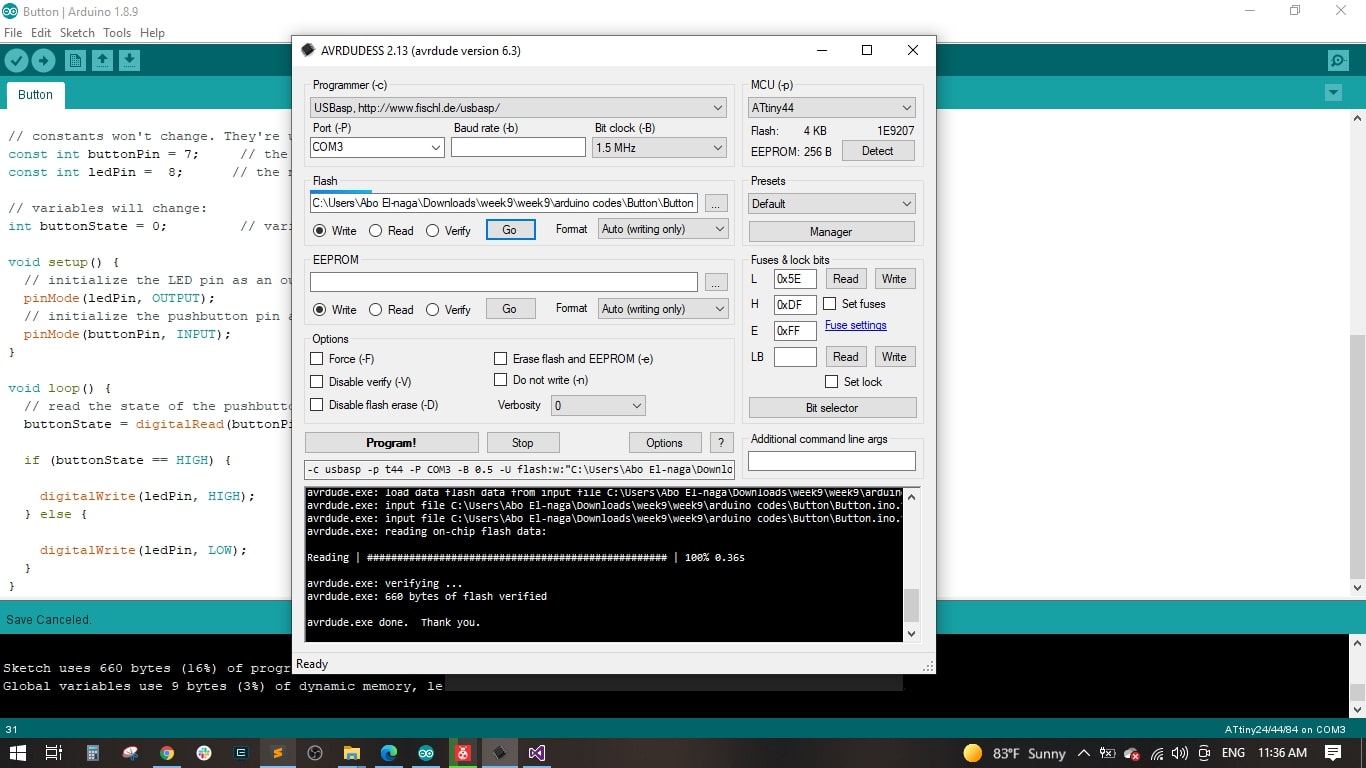
Step(4): Burning the code using AVRDUDESS.
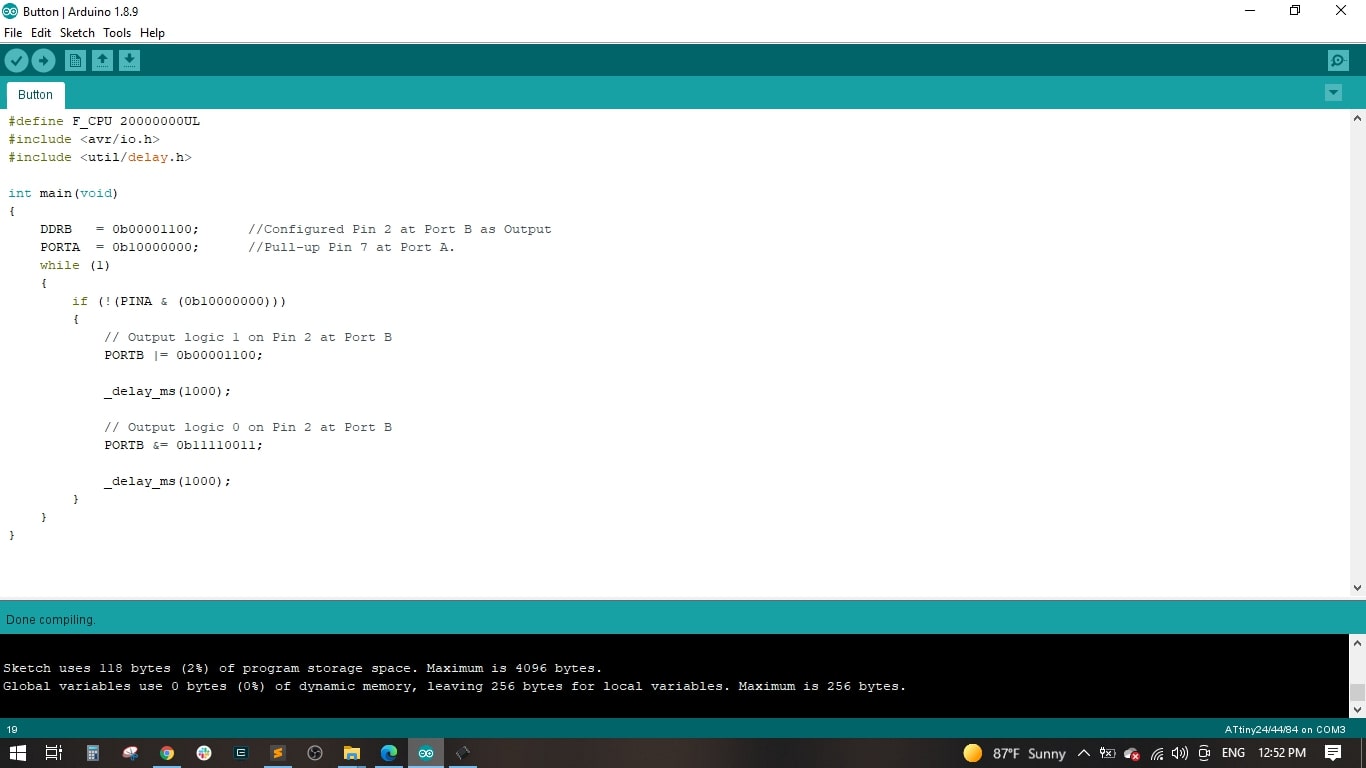
Step(5): Programming the board using C Language
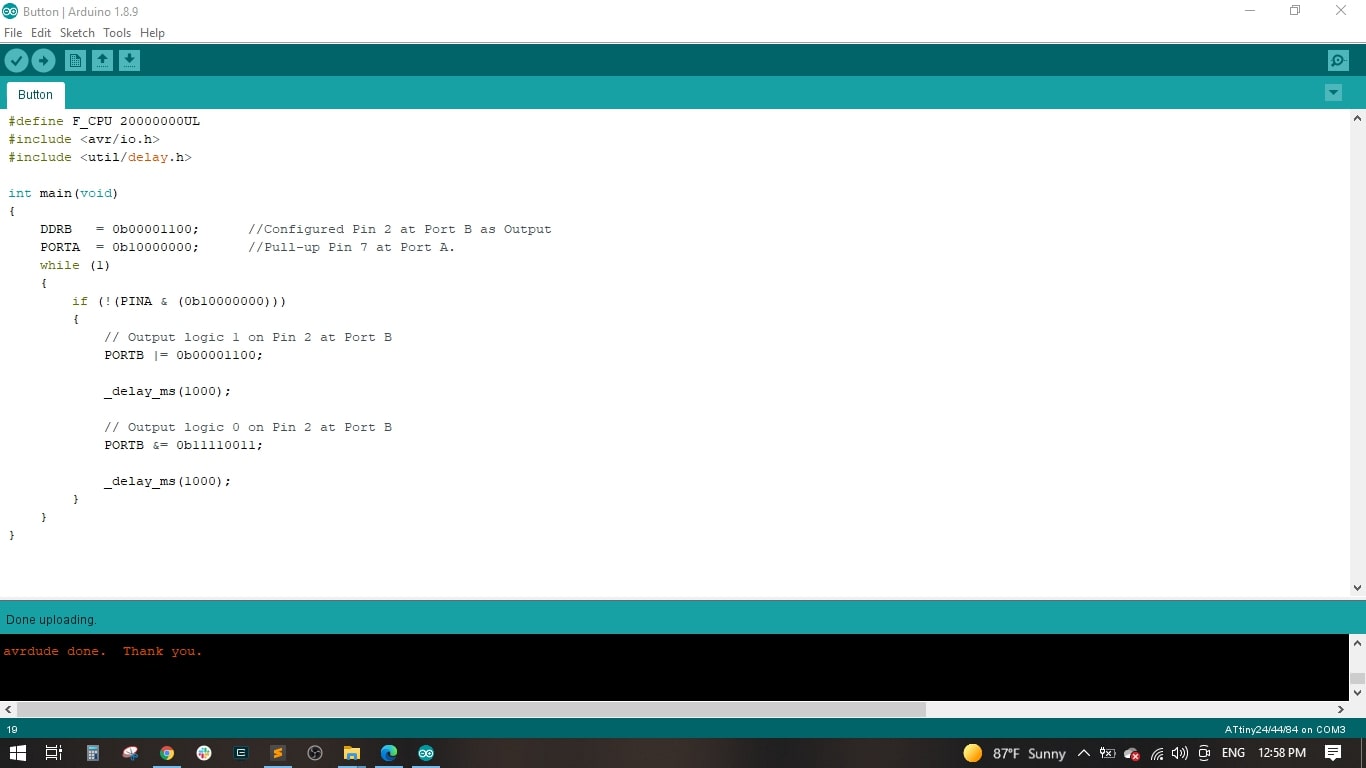
- I wrote a code in C language when the button is pressed, the led turns on for 1 sec.
- I compiled the sketch and uploaded it to my board and it worked very well.
Finally, I have:
√ Linked to the group assignment page.
√ Documented what I learned from reading a microcontroller datasheet.
√ Programmed my board.
√ Described the programming processes I used.
√ Included my source code.
√ Included a short ‘hero video’ of my board.