Slide

Video
Plan in the last month (23. 05. 2021 updated)
| To Do | Realization | |
|---|---|---|
| Week 17: 5/16-22 | First Prototype:
|
|
| Week 18: 5/23-29 | Second Prototype:
|
|
| Week 19: 5/30-6/5 | Third Prototype:
|
|
| Week 20: 6/6-12 |
|
|
| Week 21: 6/13-18 | - |
Week 17: First Prototype
The details of how I realized the first prototype are documented in Week 15: Networking and Communications.
Network
Demonstration
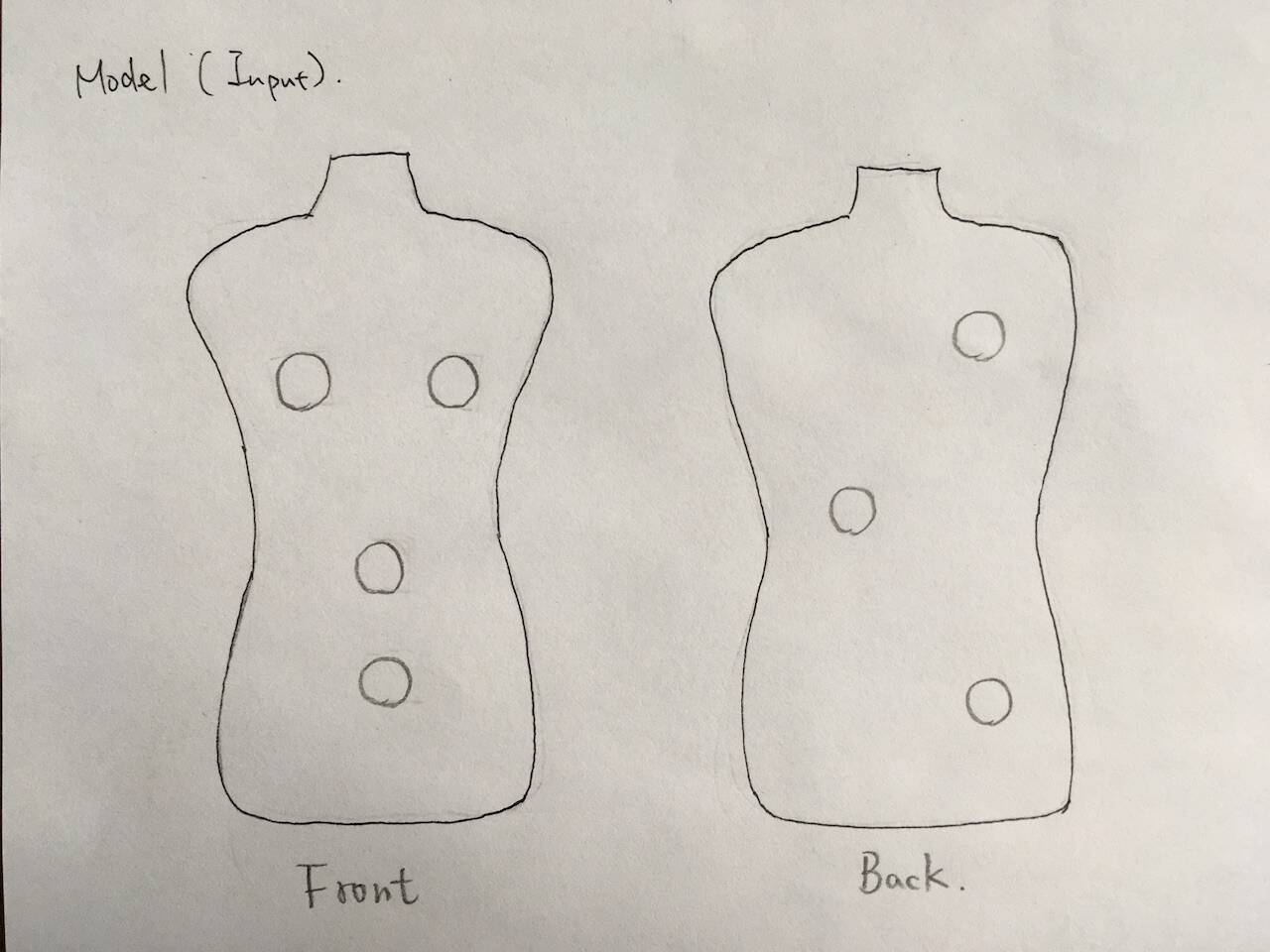
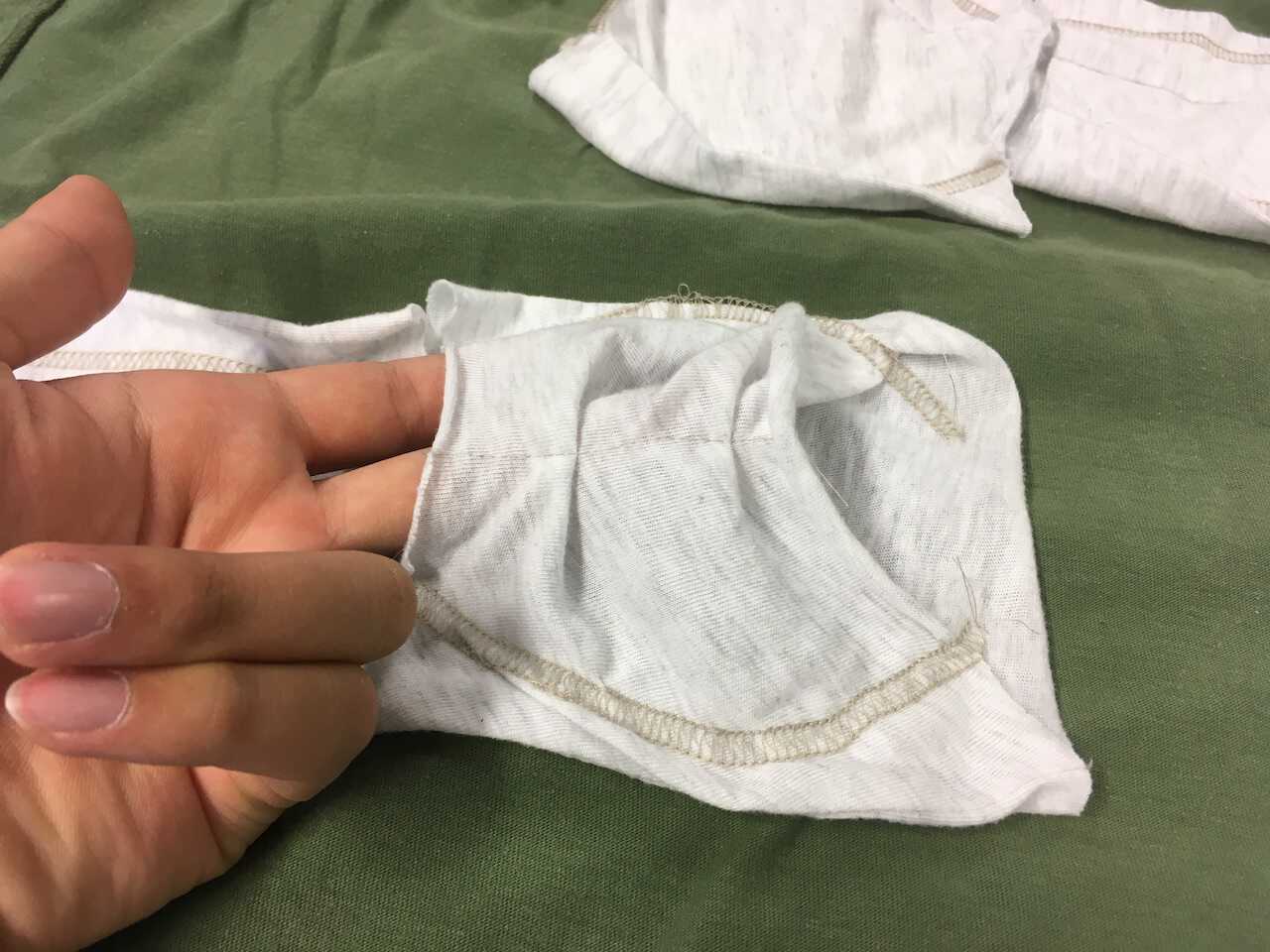
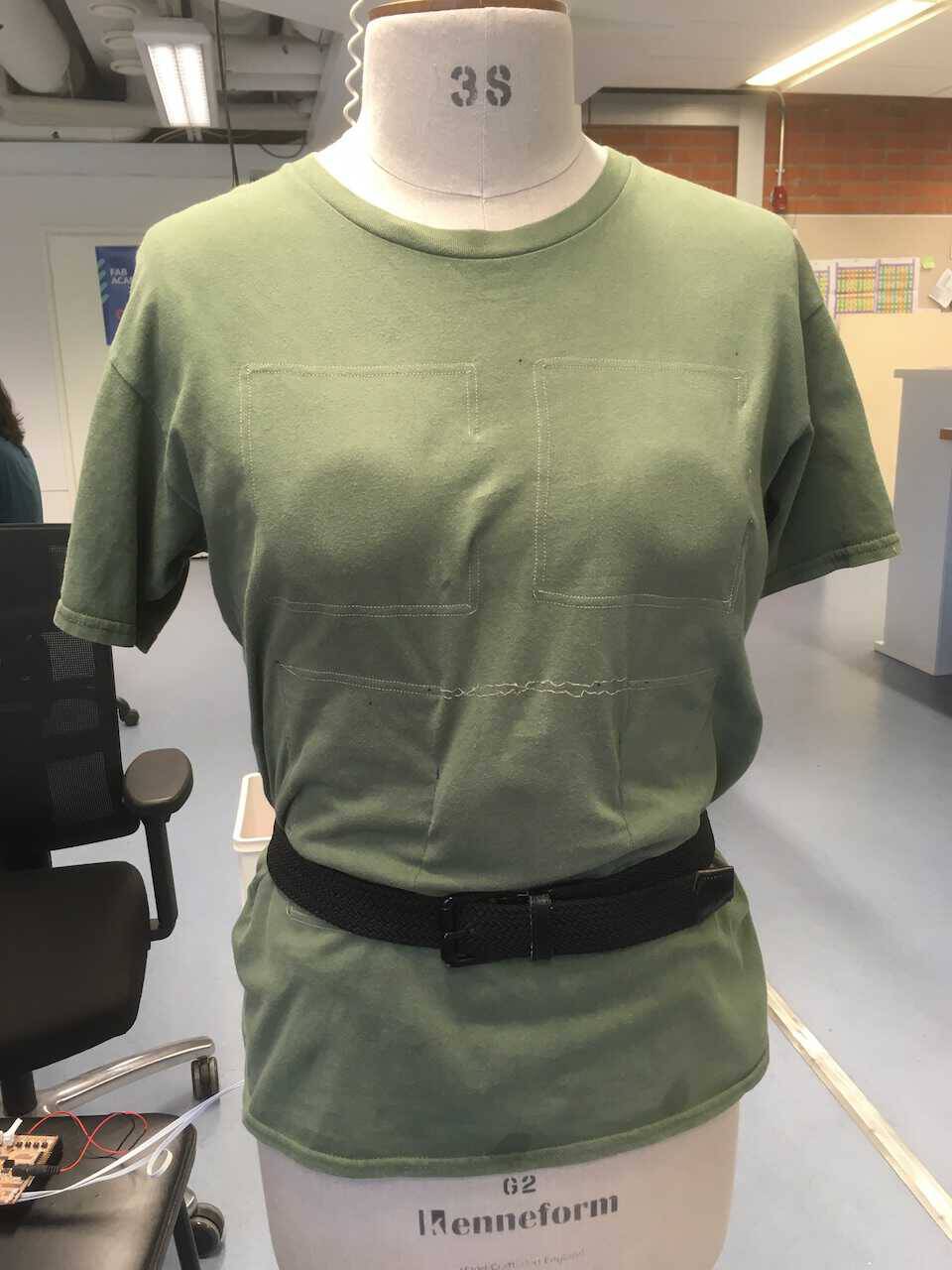
Hidden Pockets in T-shirt and jacket
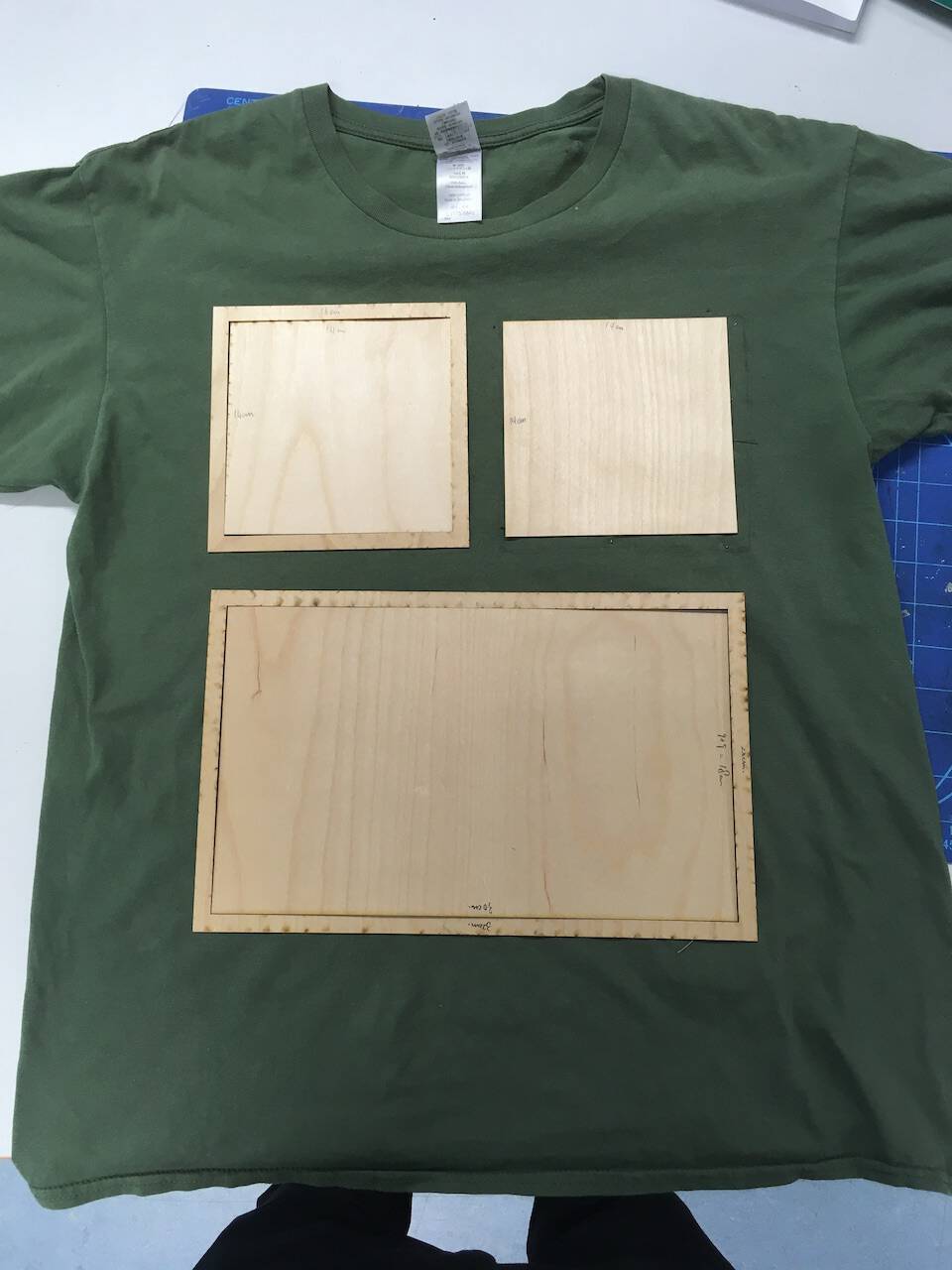
Layout of the T-shirt and mannequin
T-Shirt with vacuum bags
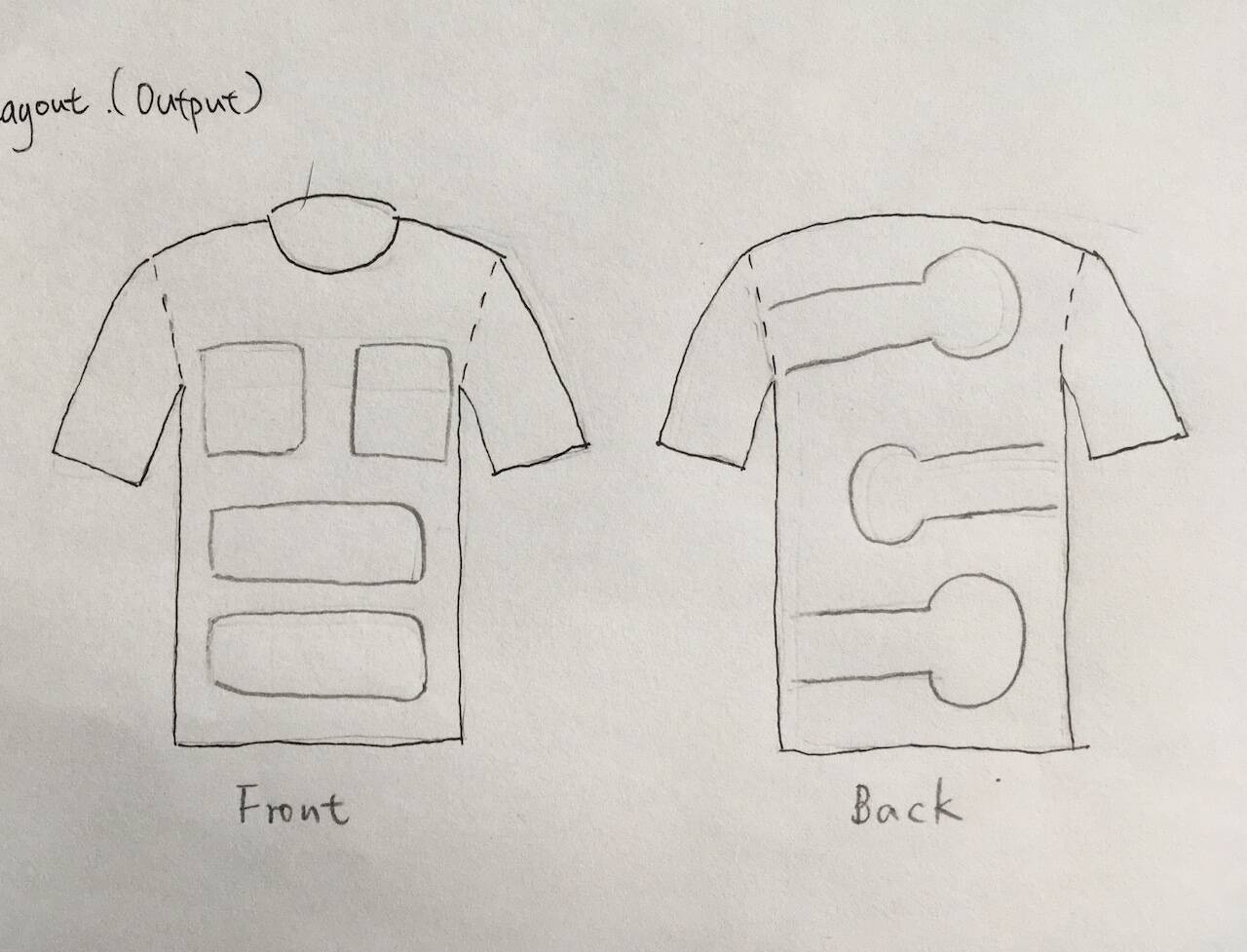
Mannequin with step response sensors
Following the patterns I designed, I laser cut several plywood patterns to simplify later works on hidden pockets and welding the bags.
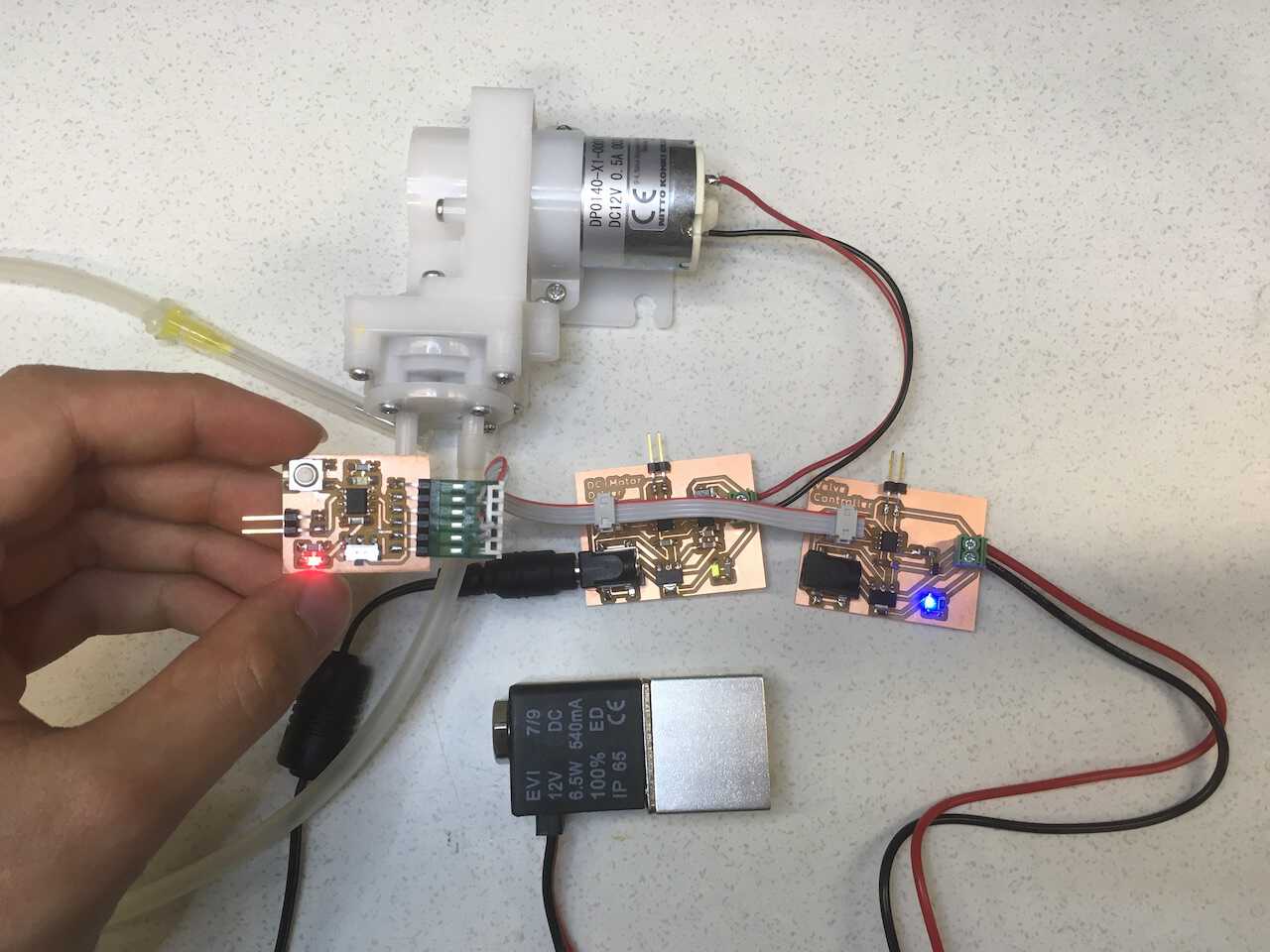
Tubing Plan
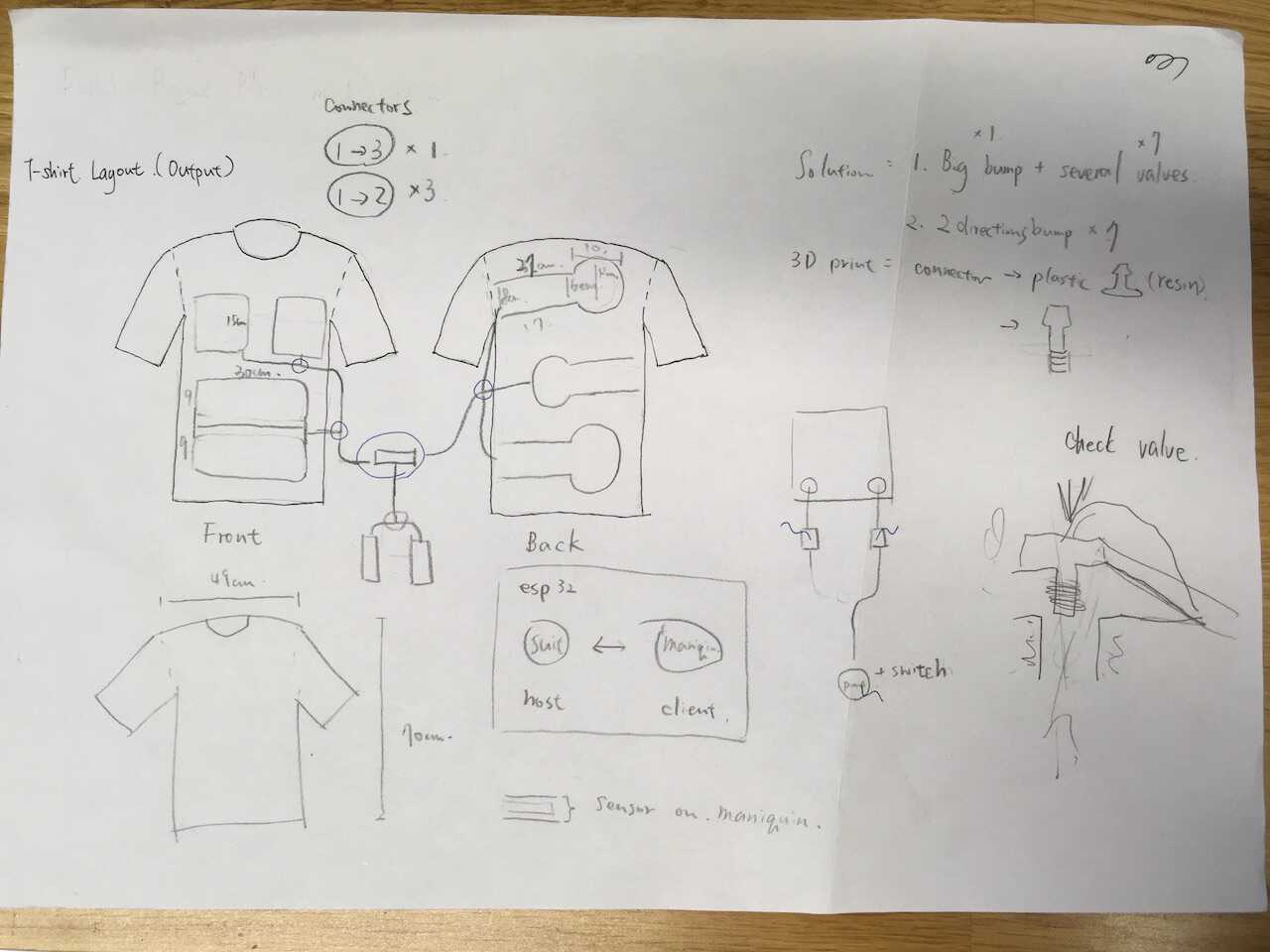
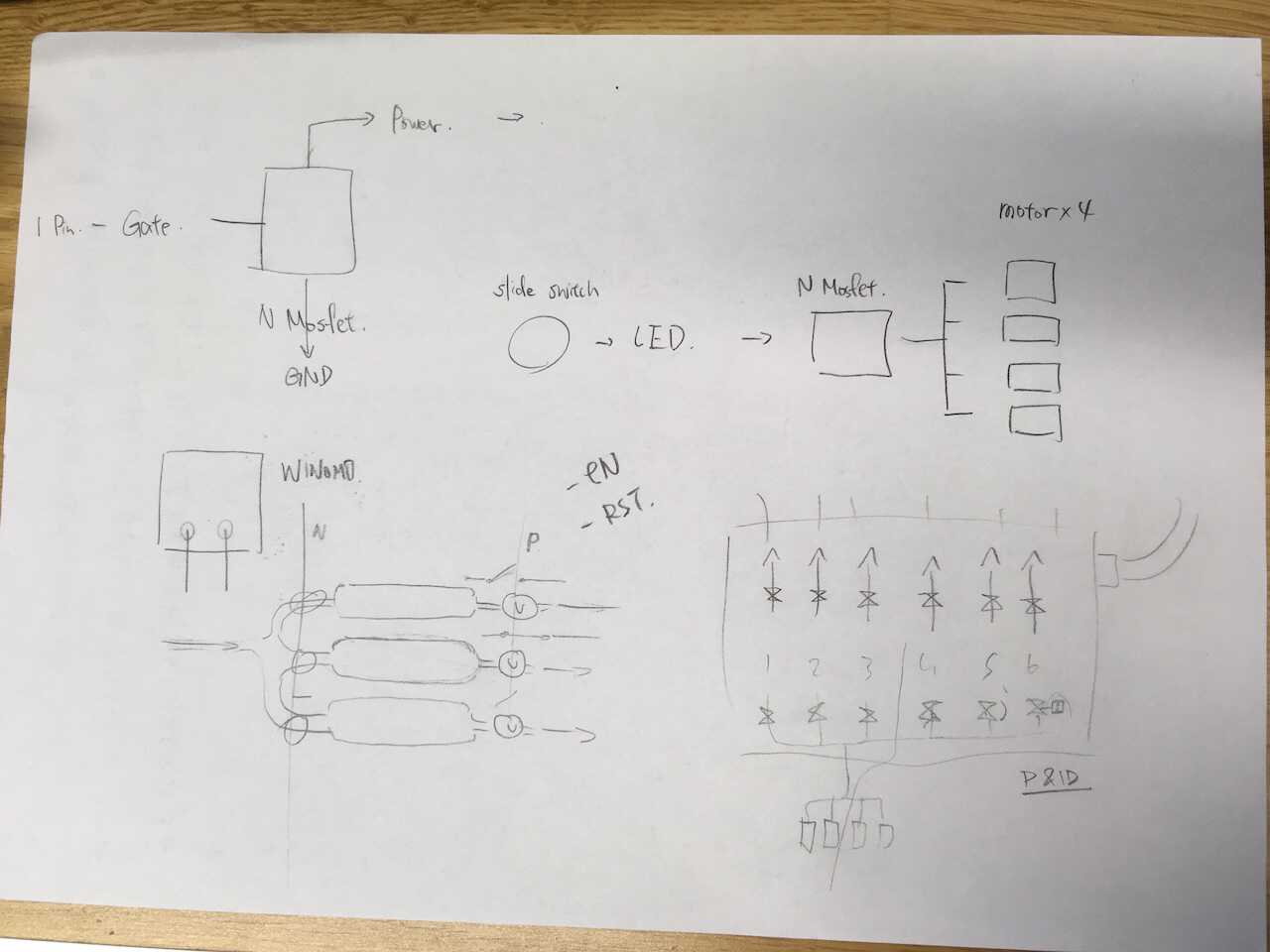
The first idea was to install an intake and an outlet two-way valve for each bag to control incoming and outgoing air to inflate and deflate the bags. But later this was changed to just one three-way valve when I got them from Adafruit.
Feeling Test of vacuum bags in a pocket
I can feel the inflation of the bag, but the pockets should be closer to the body and the clothing should be tighter. Later, I will improve it with a fitted jacket and belt to ensure the feeling of hugs.

Sewing Machines
 Coverstitch Sewing Machine, Global
Coverstitch Sewing Machine, GlobalFor flexible edges or components on clothes, general purpose for use with light to medium-weight fabrics.
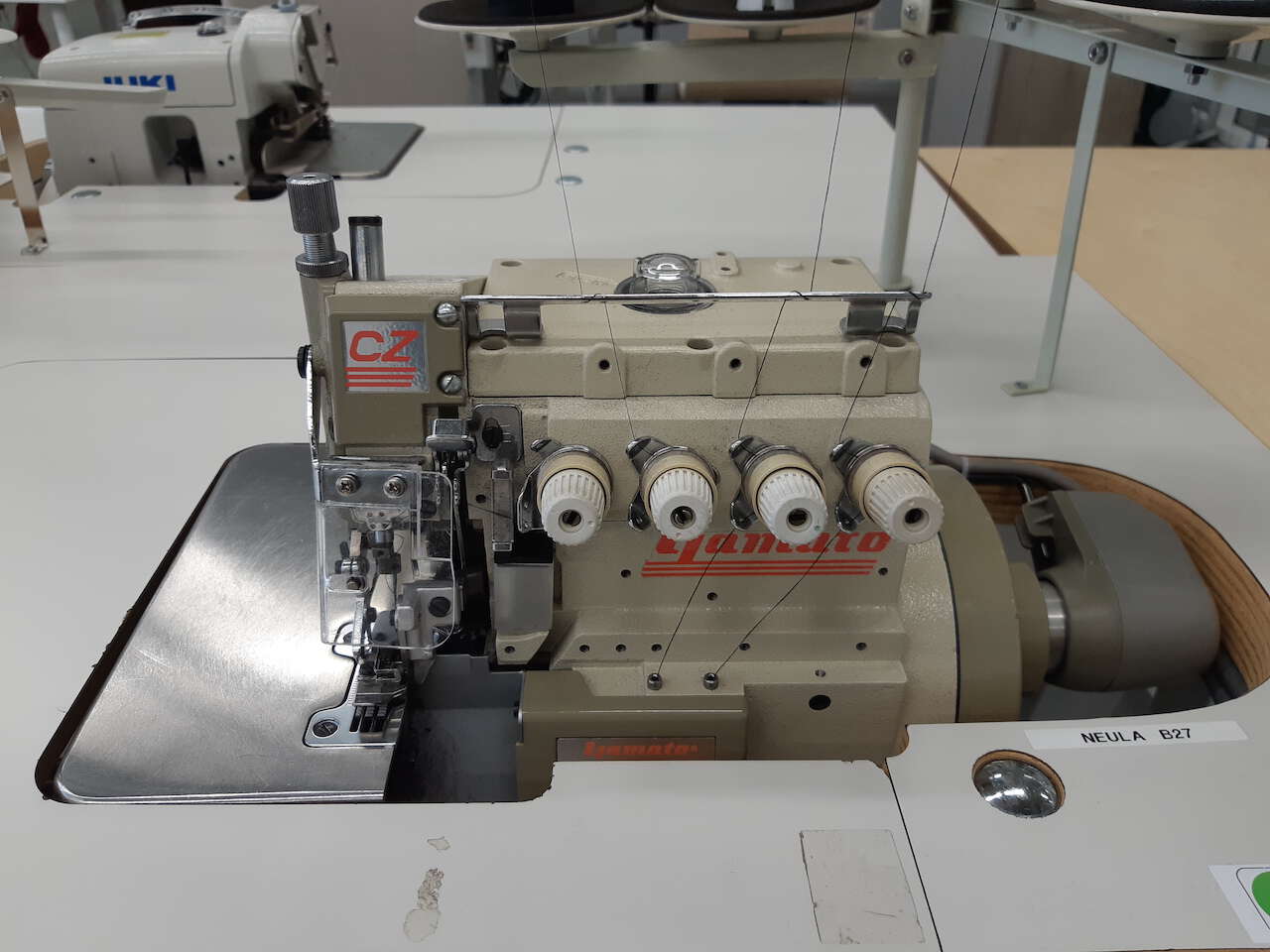 Overlock Machine, YAMATO
Overlock Machine, YAMATOFinish the edges of fabrics.
 Lockstitch Sewing Machine, Brother
Lockstitch Sewing Machine, BrotherThe lockstitch machine sews only straight stitches.
Fix the fabrics with Needle

Hero Shot of Hidden Pockets
 T-shirt Front Side
T-shirt Front Side
 T-shirt Back Side
T-shirt Back Side
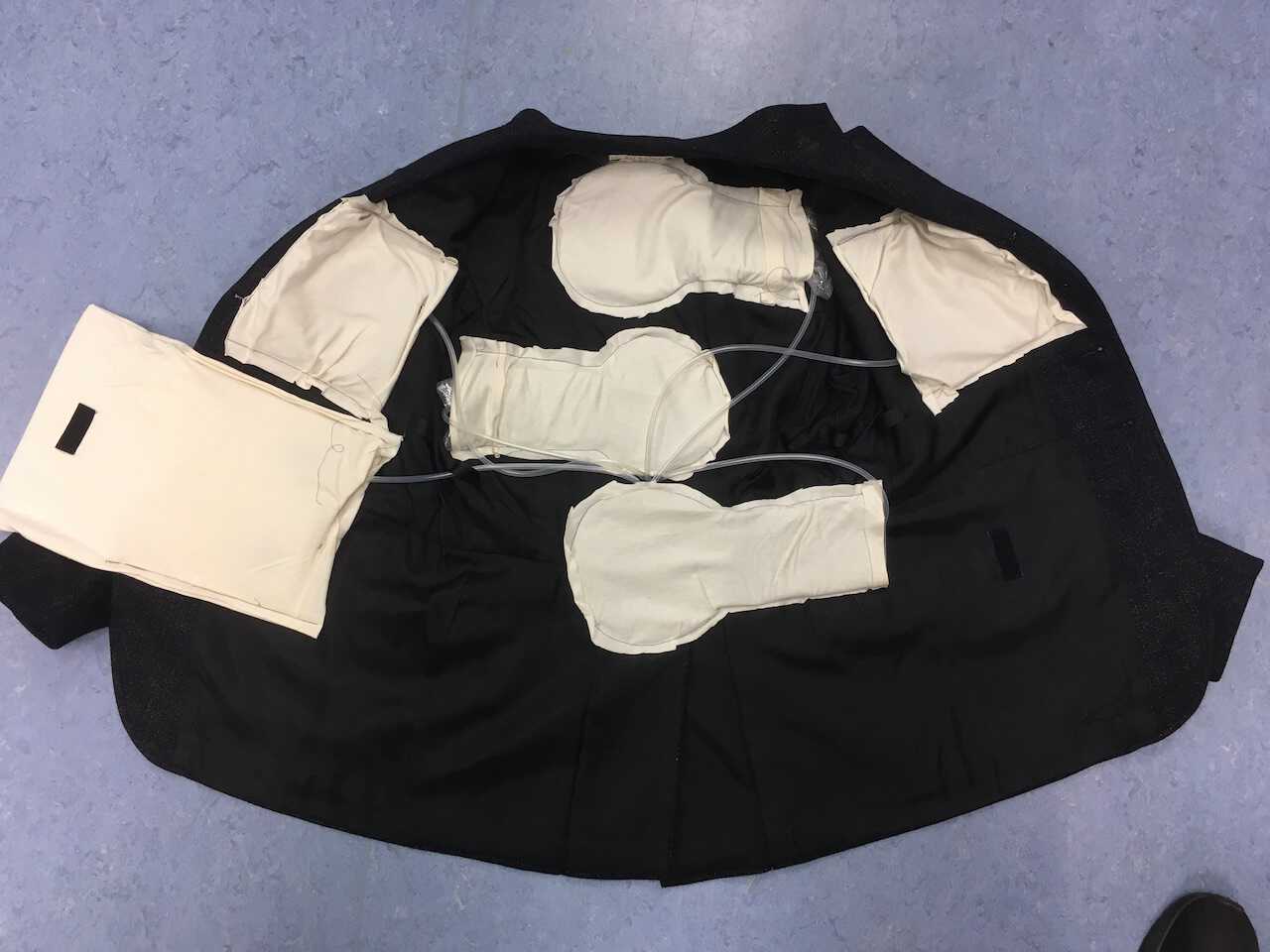 Jacket Inside
Jacket Inside
Some details of pockets
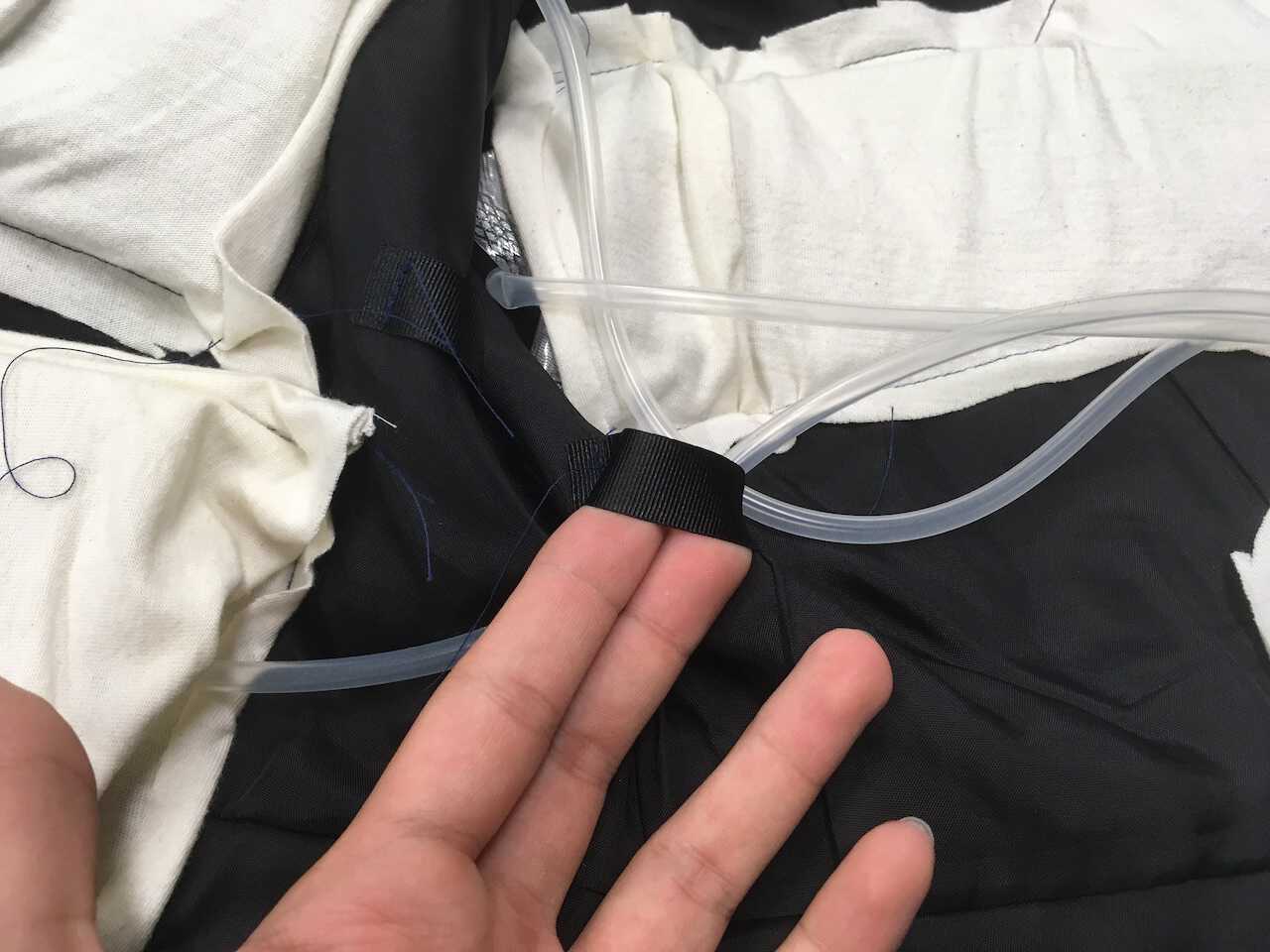 Short bands to guide the tubings
Short bands to guide the tubings
 Velcros to fix the pocket well
Velcros to fix the pocket well
 Straight stitches to enhance the banding effect of arm bags
Straight stitches to enhance the banding effect of arm bags
Vacuum Bags and 3D printed connectors
In Week 17: Wildcard week, I learned how to use an Ultrasonic Welding machine to weld(sew) the vacuum bags. So I made them according to the laser cut patterns which would fit my pockets perfectly. Further details can be found in Week17.
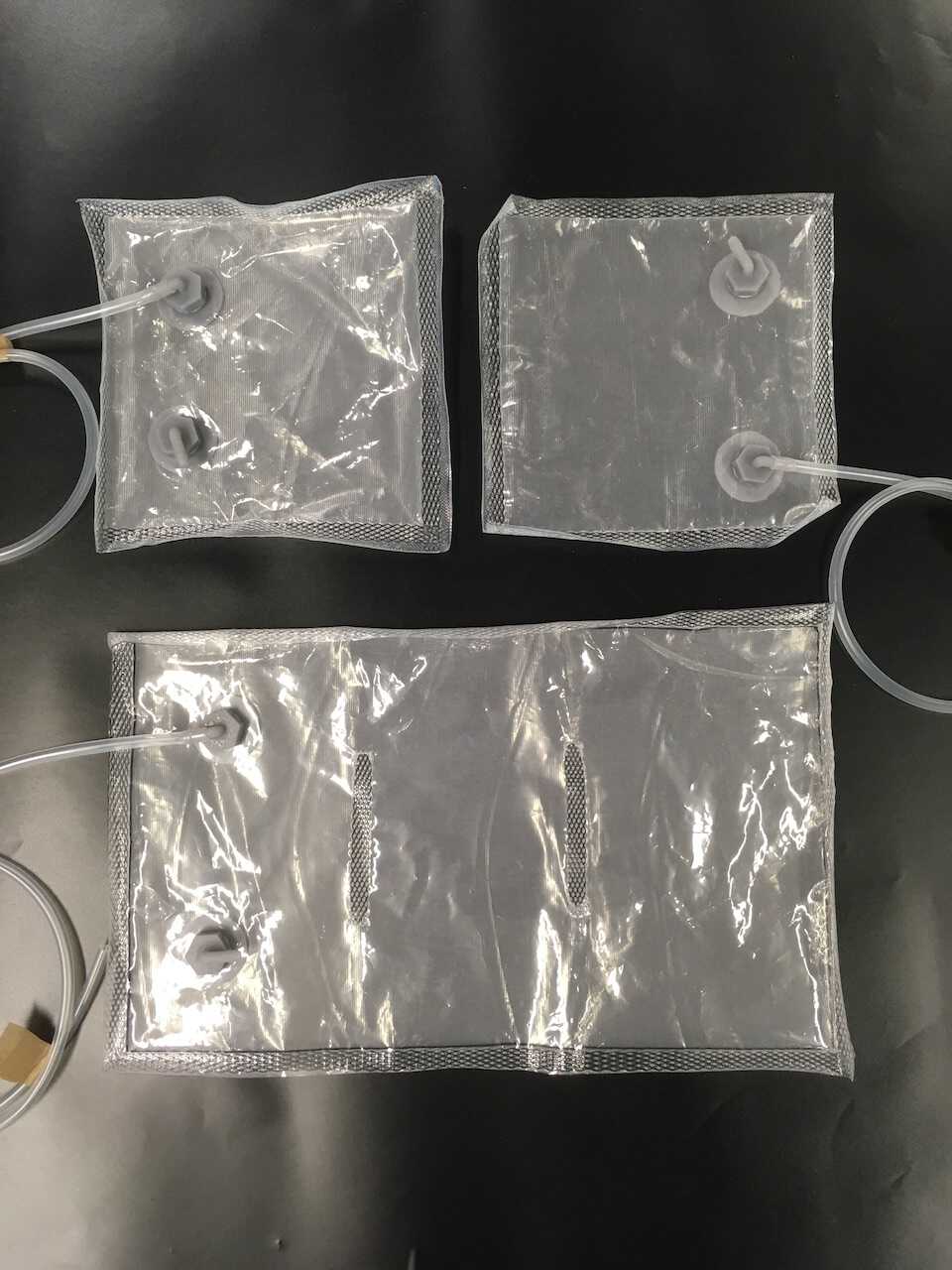 Two chest bags and a belly bag for Front Side
Two chest bags and a belly bag for Front Side
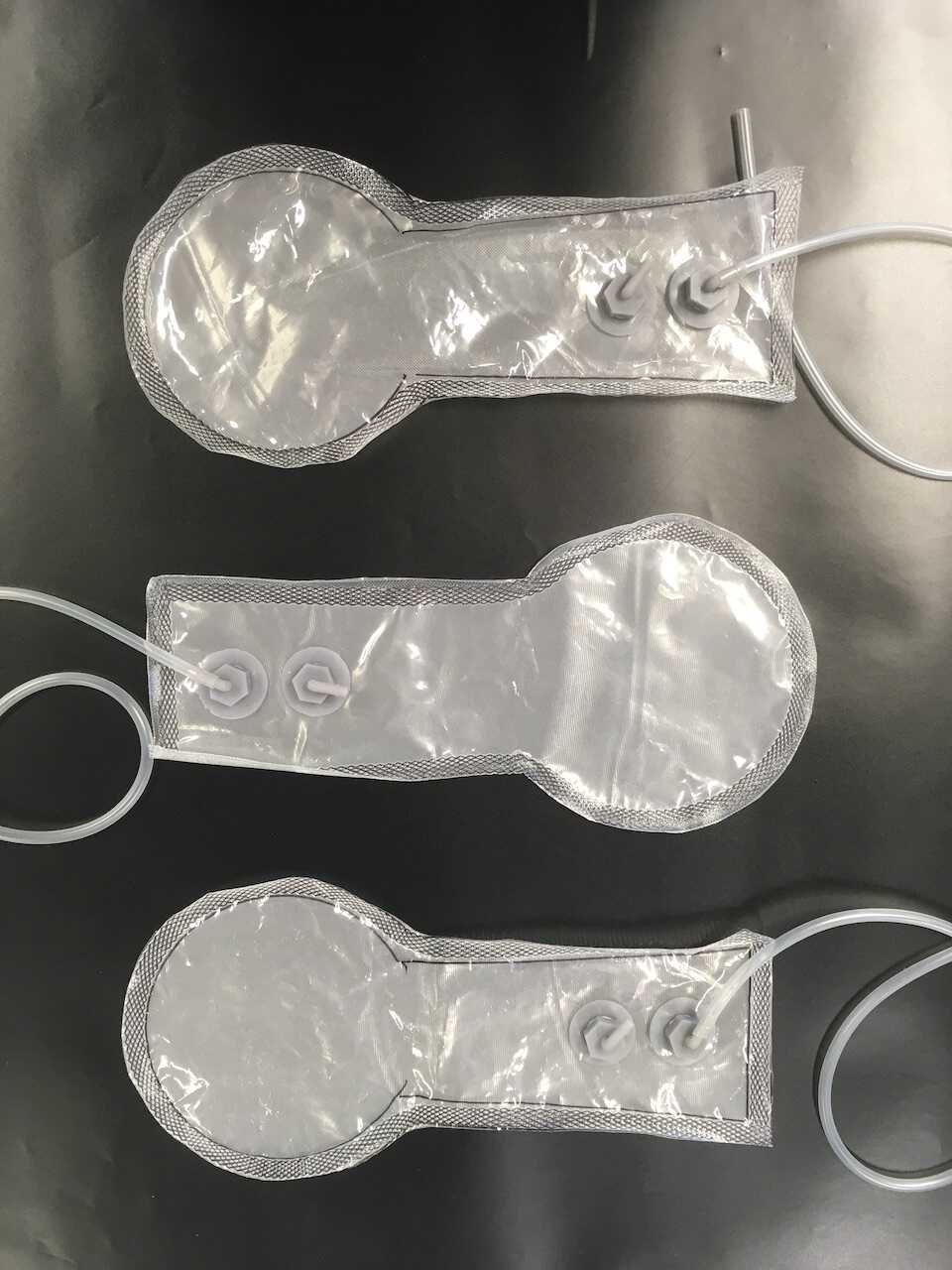 Three arm bags for Back Side
Three arm bags for Back Side
3D printed connectors for valves
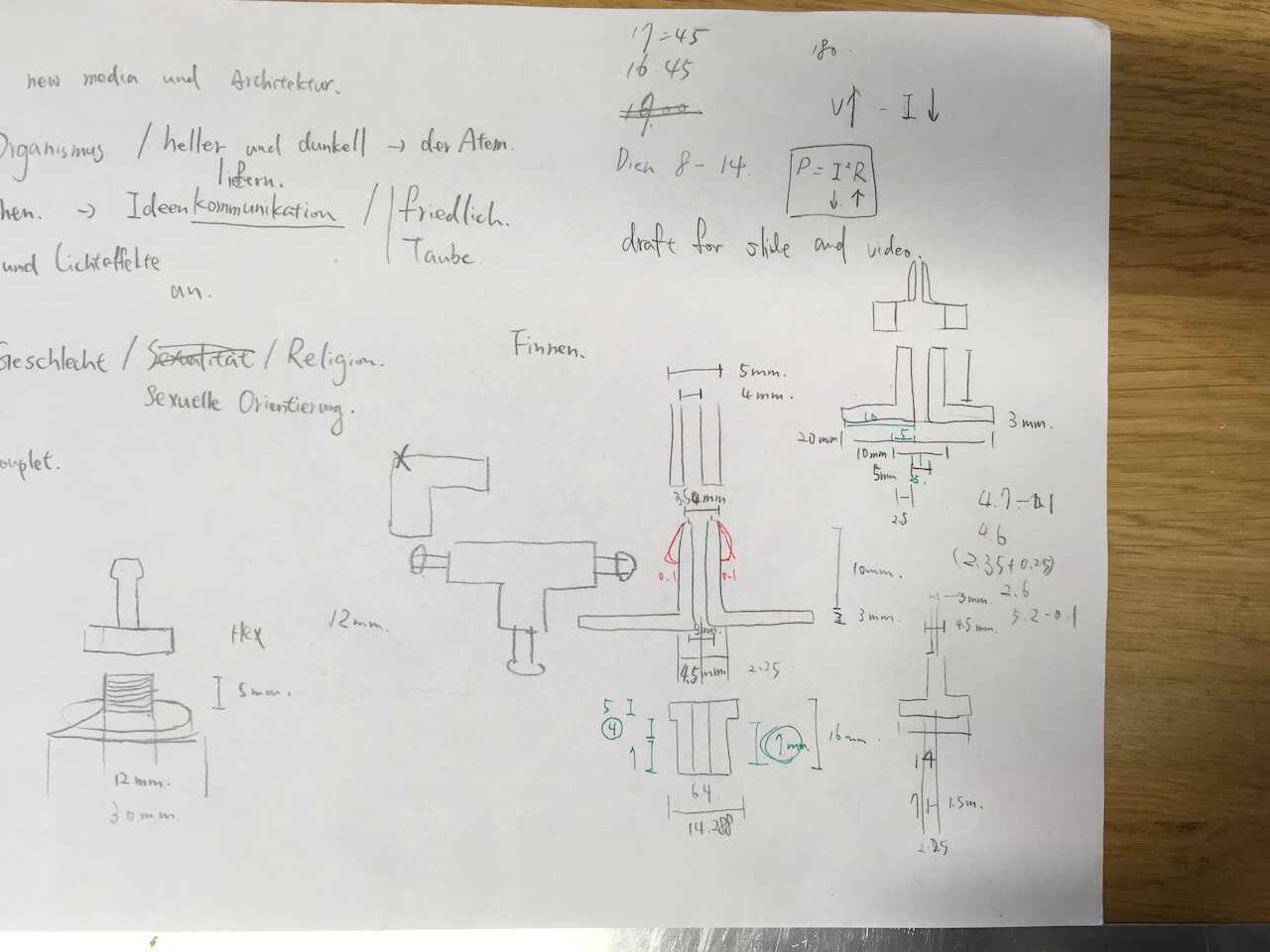
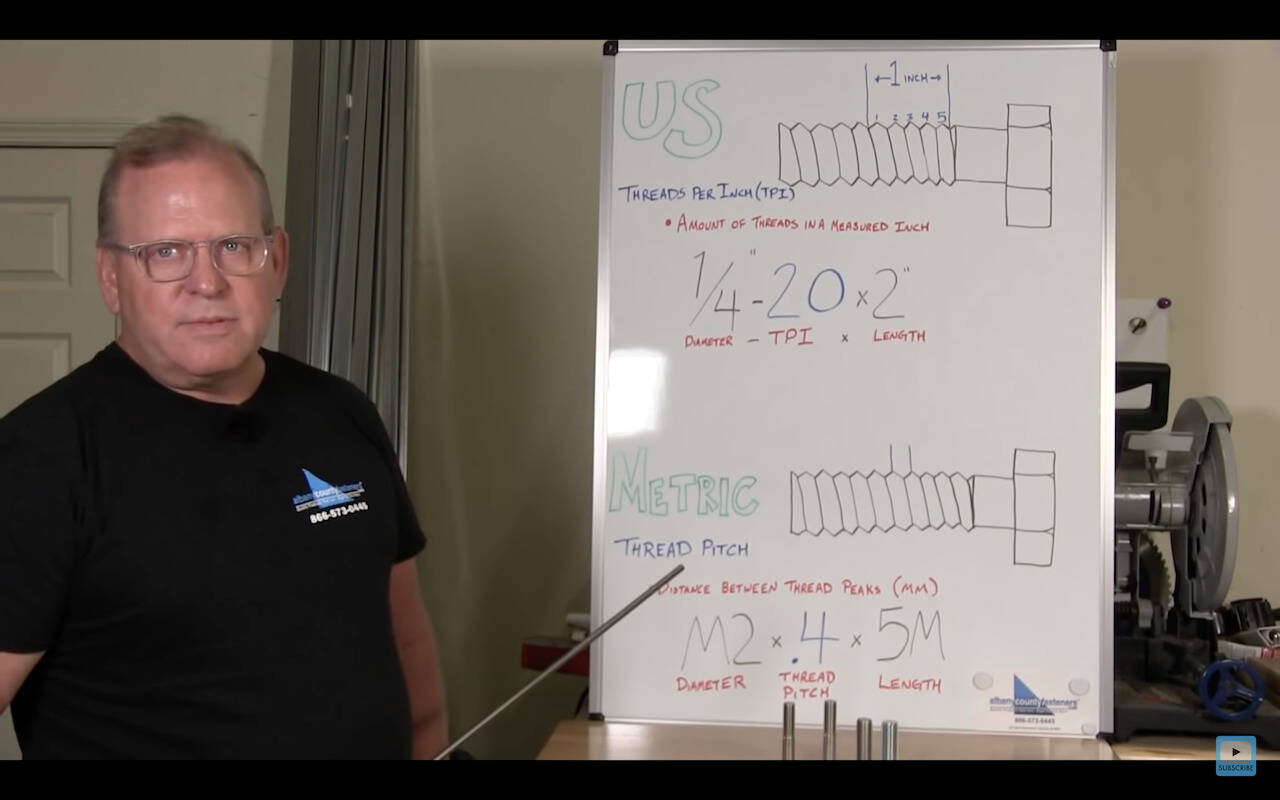
I tried to model connectors with threads which fit my valves I went through several tutorials: 3D Printed Thread, Measuring Thread Pitch & Threads Per Inch, and Copy Threads from McMaster. All of these tutorials helped me to create the connectors with Fusion 360 and understand the different standards of screw better. Inch-to-NPT Male-Female Hex Thread Adapters with Through Hole was my reference for valve connectors.
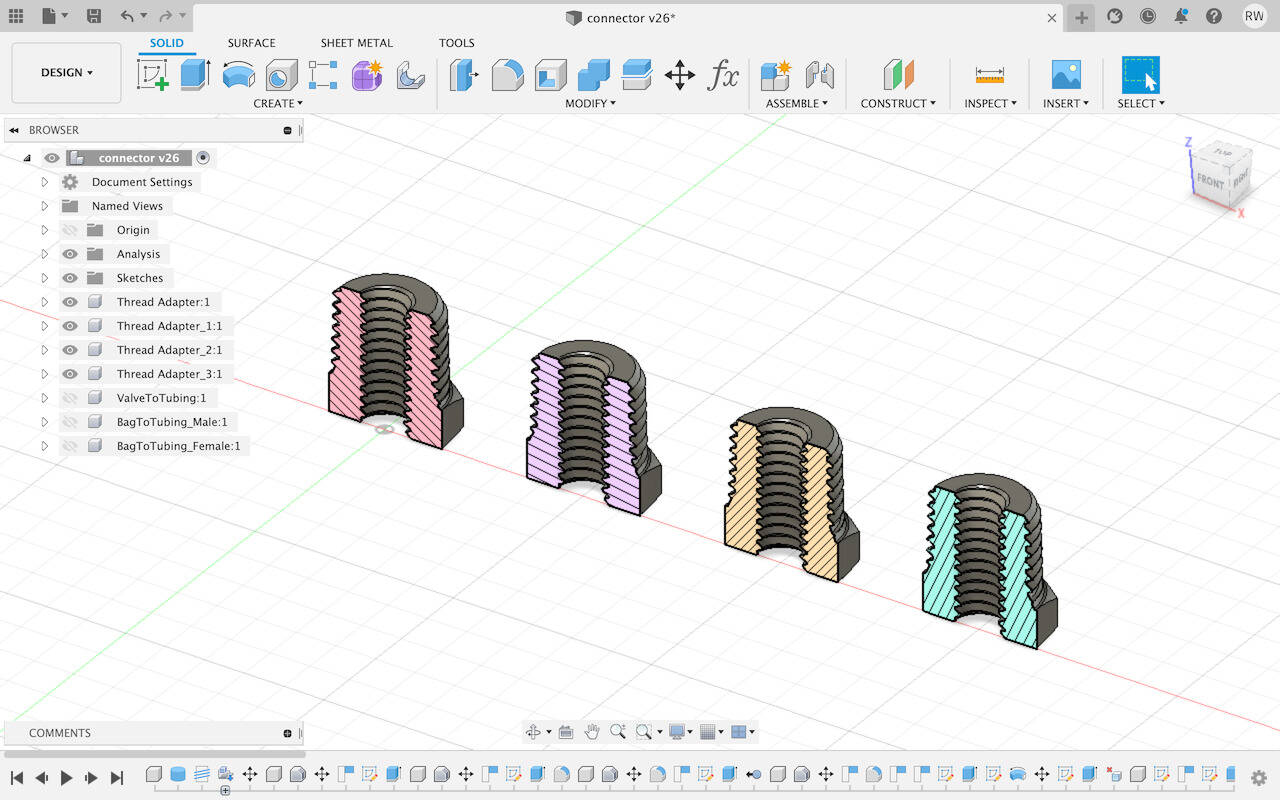 With different tests of threads, I found the best setting for my valves. And the shrink of filaments also needed to be considered.
With different tests of threads, I found the best setting for my valves. And the shrink of filaments also needed to be considered.



3D printed connectors for vacuum bags
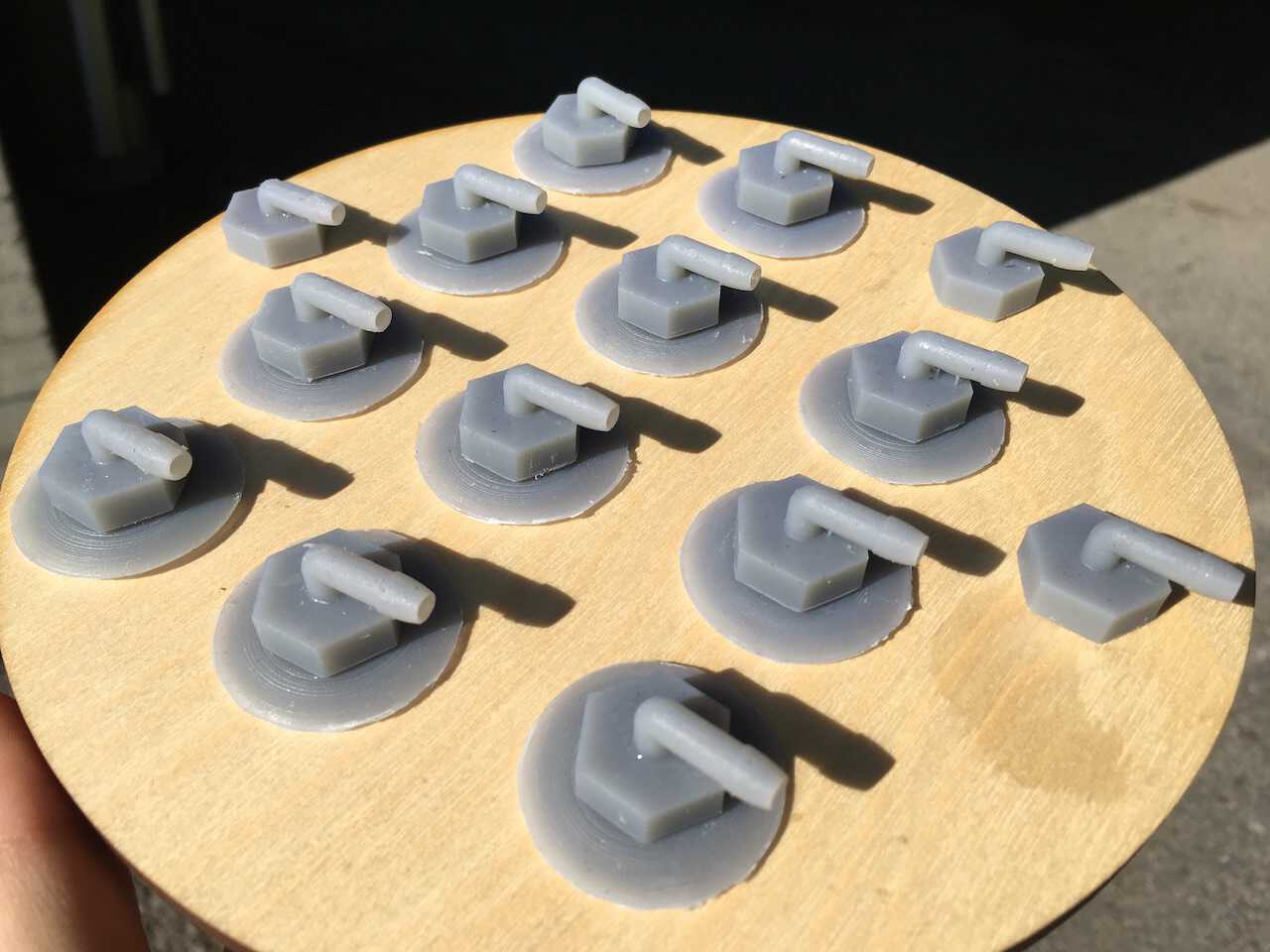
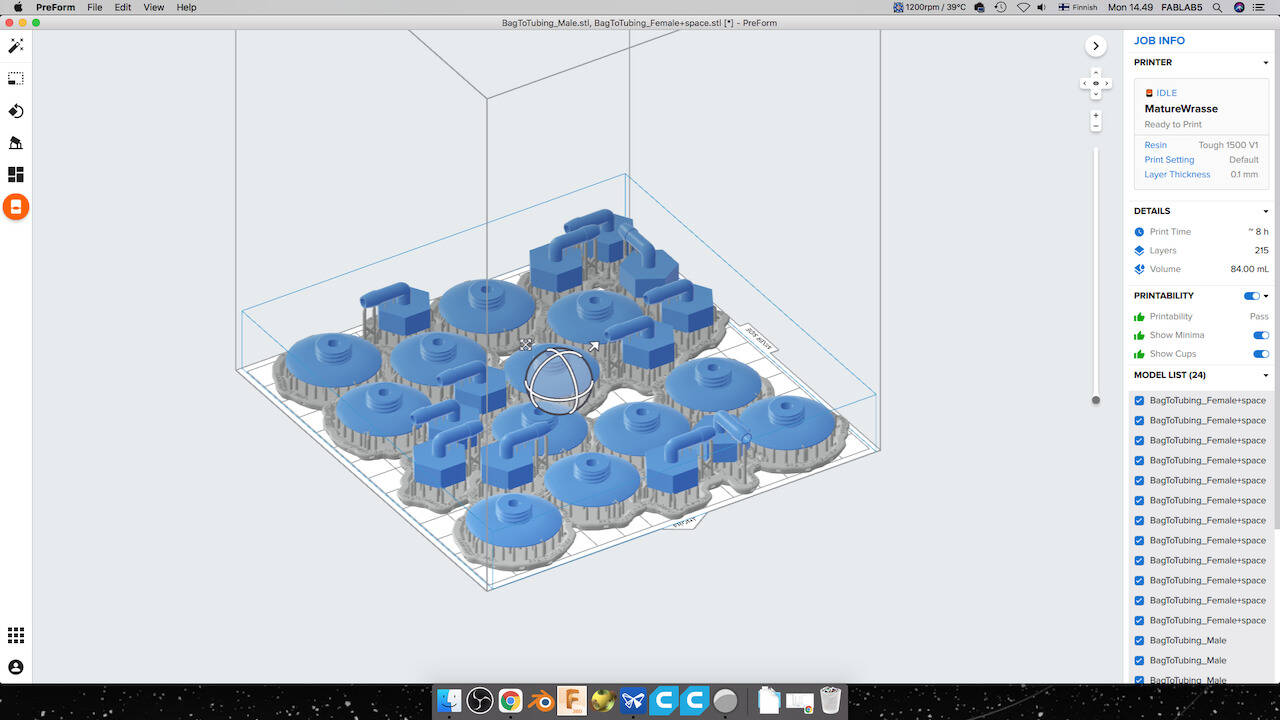
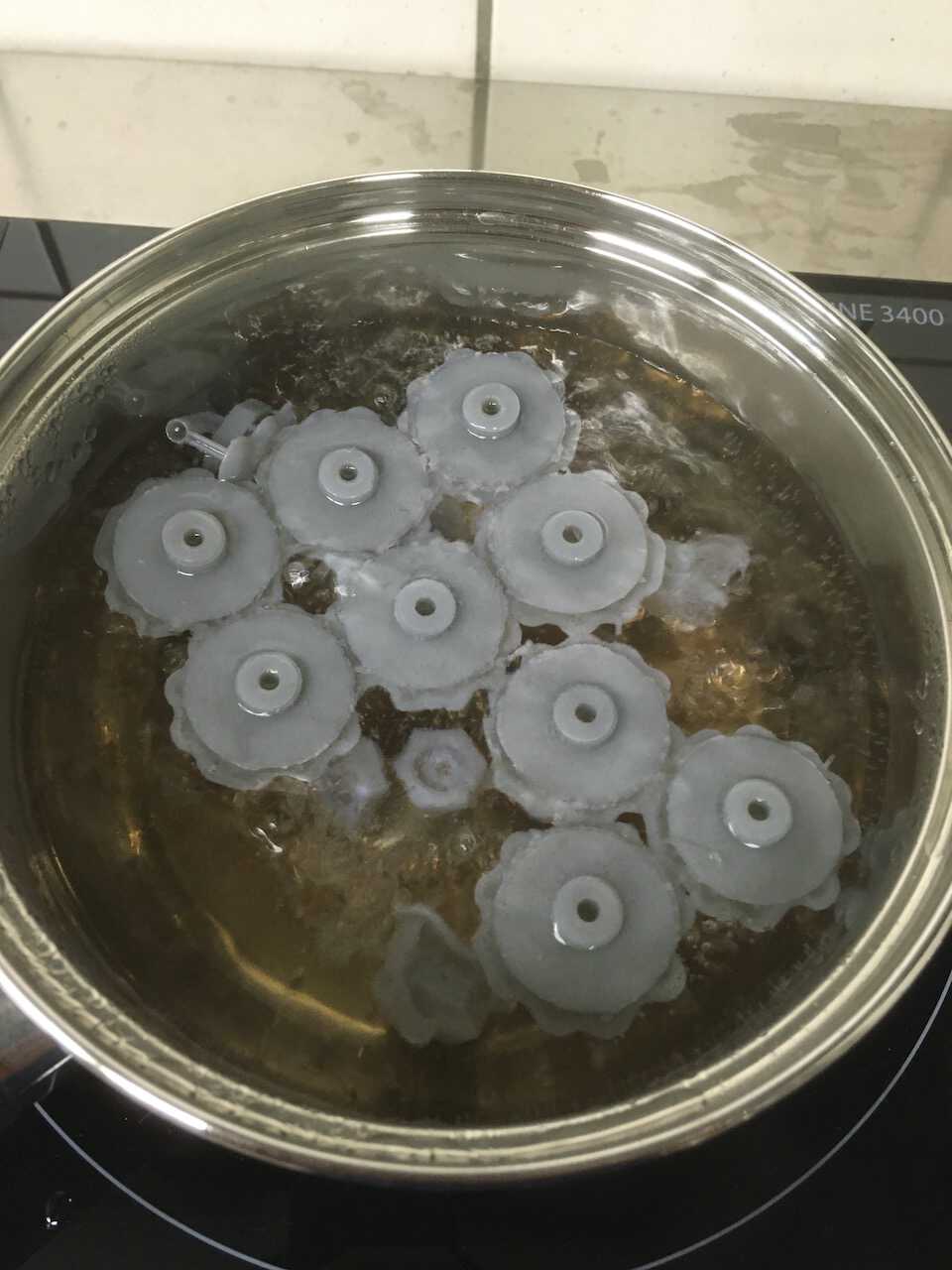
After I printed the connectors, they should have been put in a UV box for just 1–2 hours. But even after one day, they were still sticky, which didn’t happen in previous weeks. I googled the curing time for tough 1500 on the Formlab website. It needs to be exposed to UV light for 60 minutes and 70°C. Then I figured out that the location of the UV lightbox was close to a heater that was turned on in winter but was now switched off, so it took longer to cure. Then an idea came to mind: why not cook it? I tried steaming, baking, and boiling at 60°C. The result showed that boiling in 60°C water for 10 minutes was the best balance between hardening and the durable texture of my connectors.

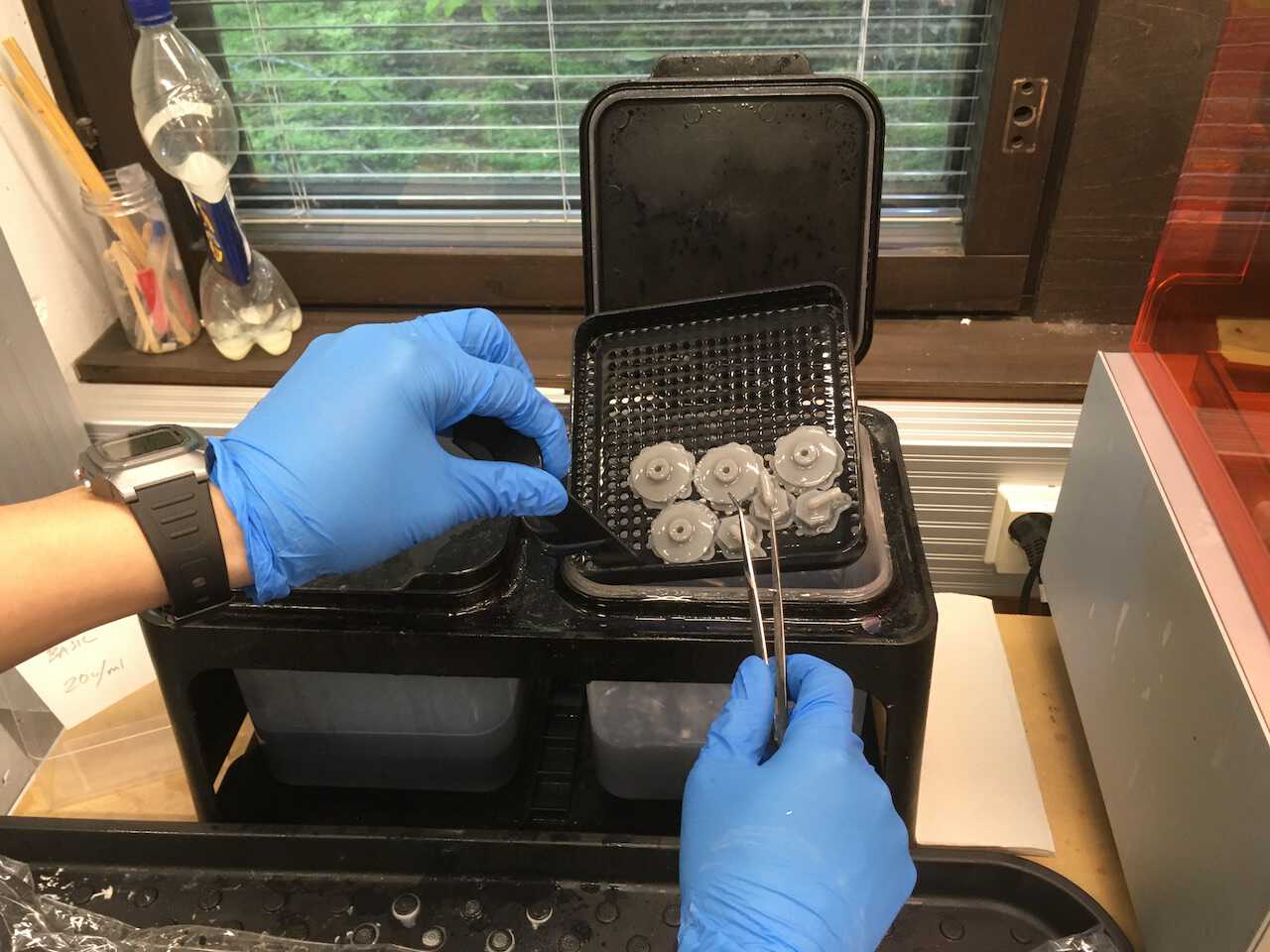
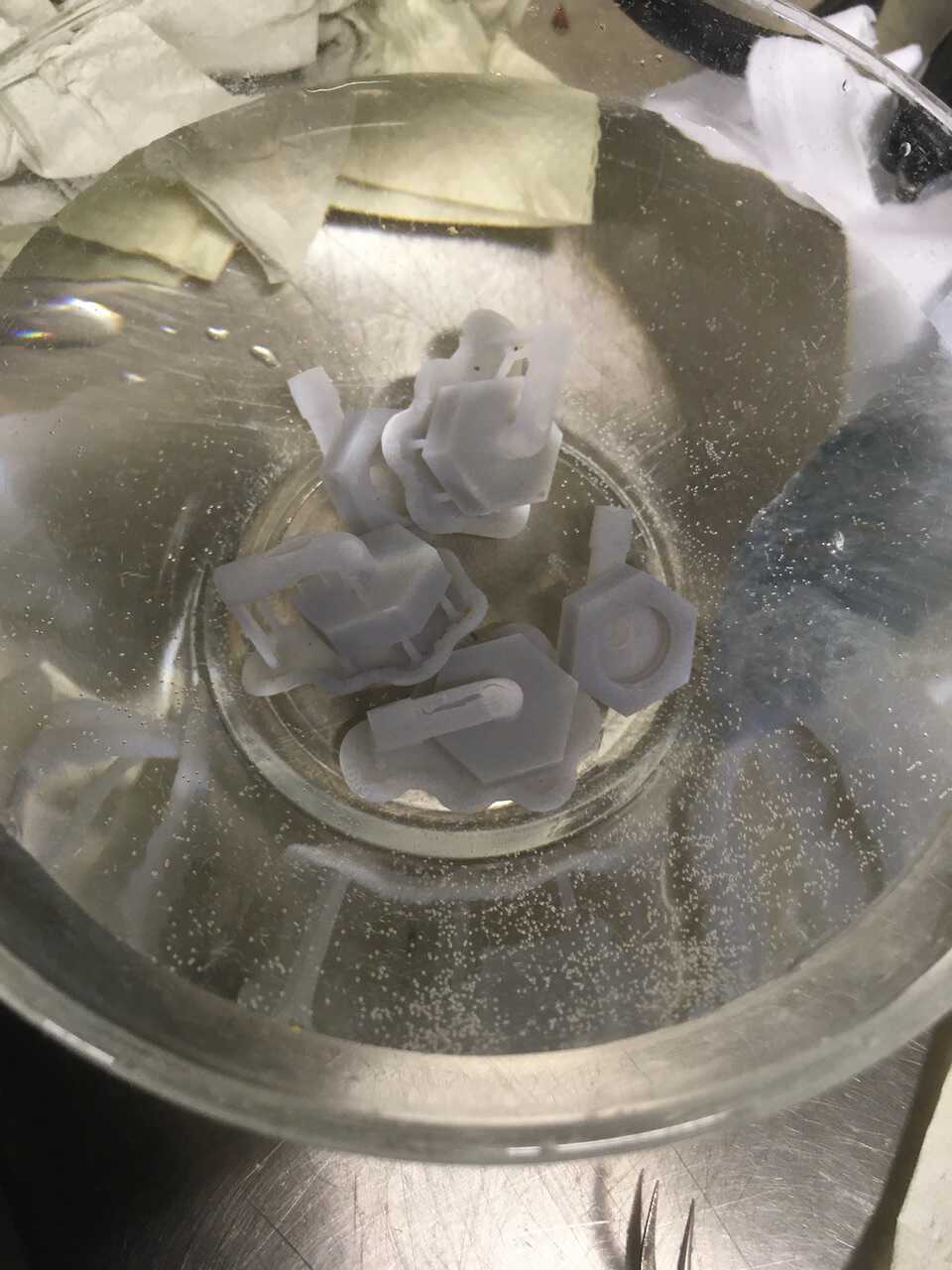 Right after boiling, cool them down with cold water
Right after boiling, cool them down with cold water
Laser cut the Rubber Washer
Find out the Air Leak
Inflation Test
Testing the feeling of inflation
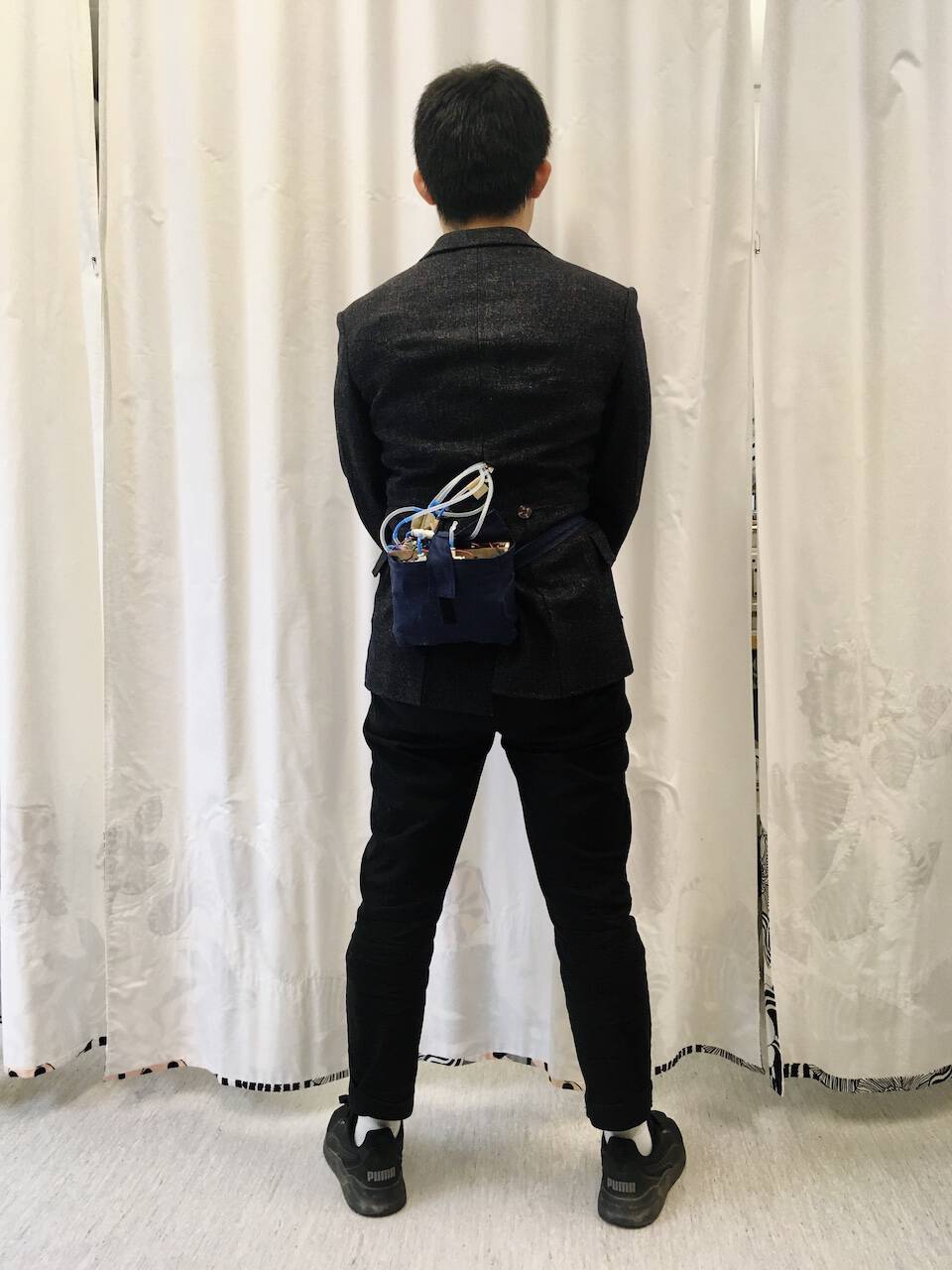
Test with fit jacket, the feeling was stronger than a loose T-shirt
 Jacket with the tubing from hidden pockets.
Jacket with the tubing from hidden pockets.
Packaging with Bags and Belt
Pattern and layout of bags
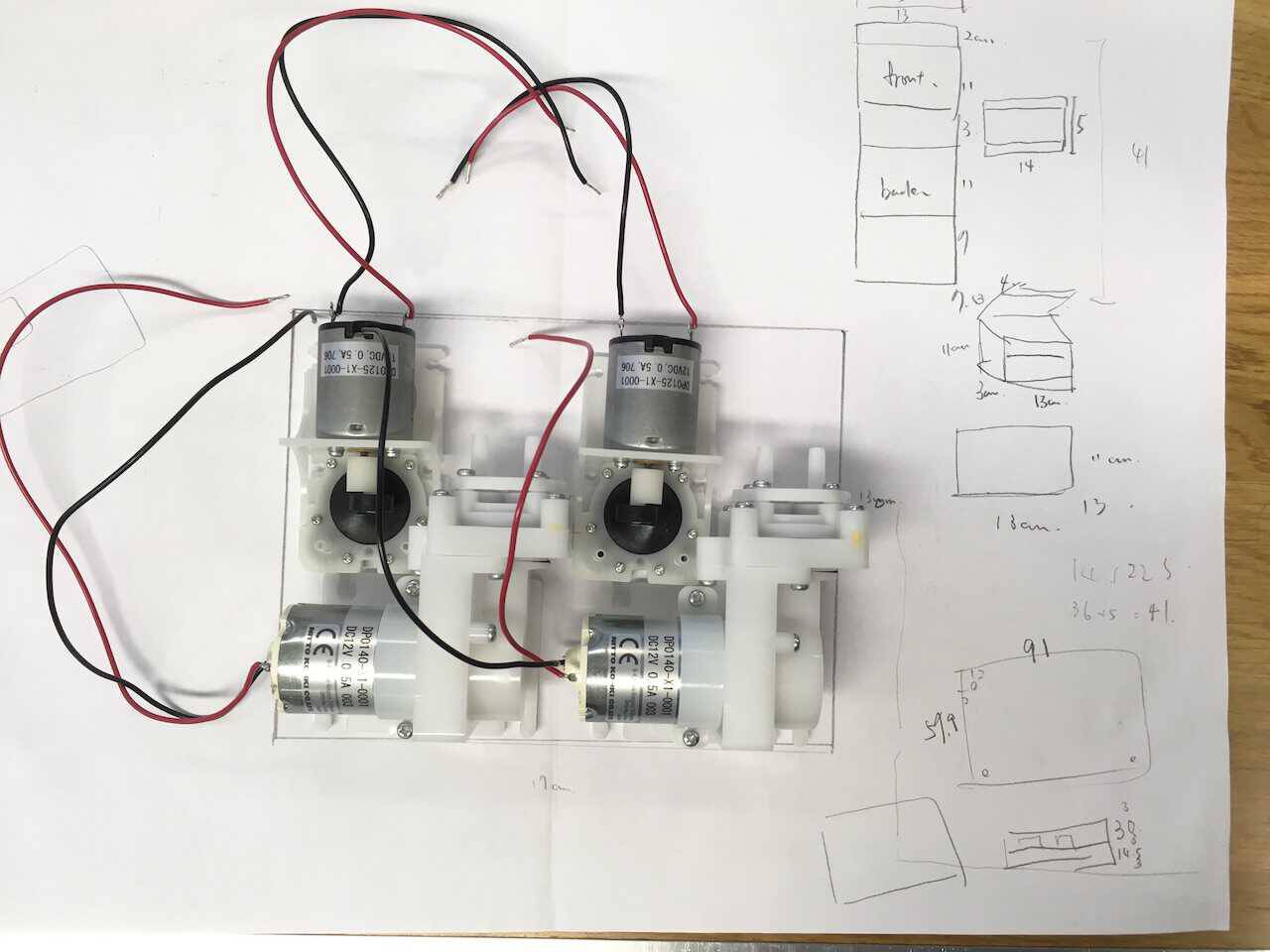
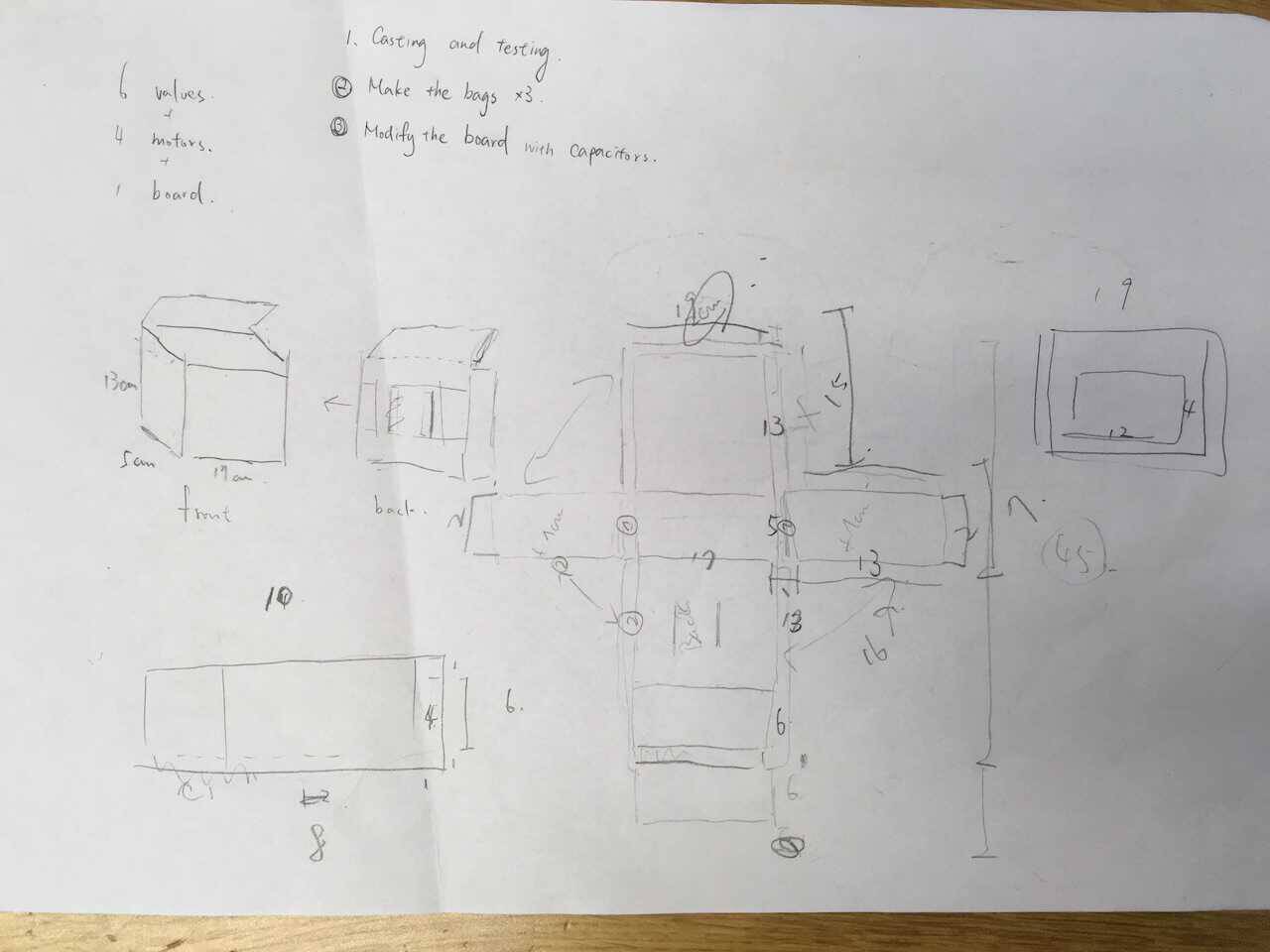
After I laid out the pumps and valves, I measured how much fabric was needed and drew the patterns with some given tolerances for sewing and some additional space. Drawing the expanded view of the bags required some experience and skill. I was able to do it with the help from Sophia at Väre and Johanna from the sewing workshop.
Start Sewing
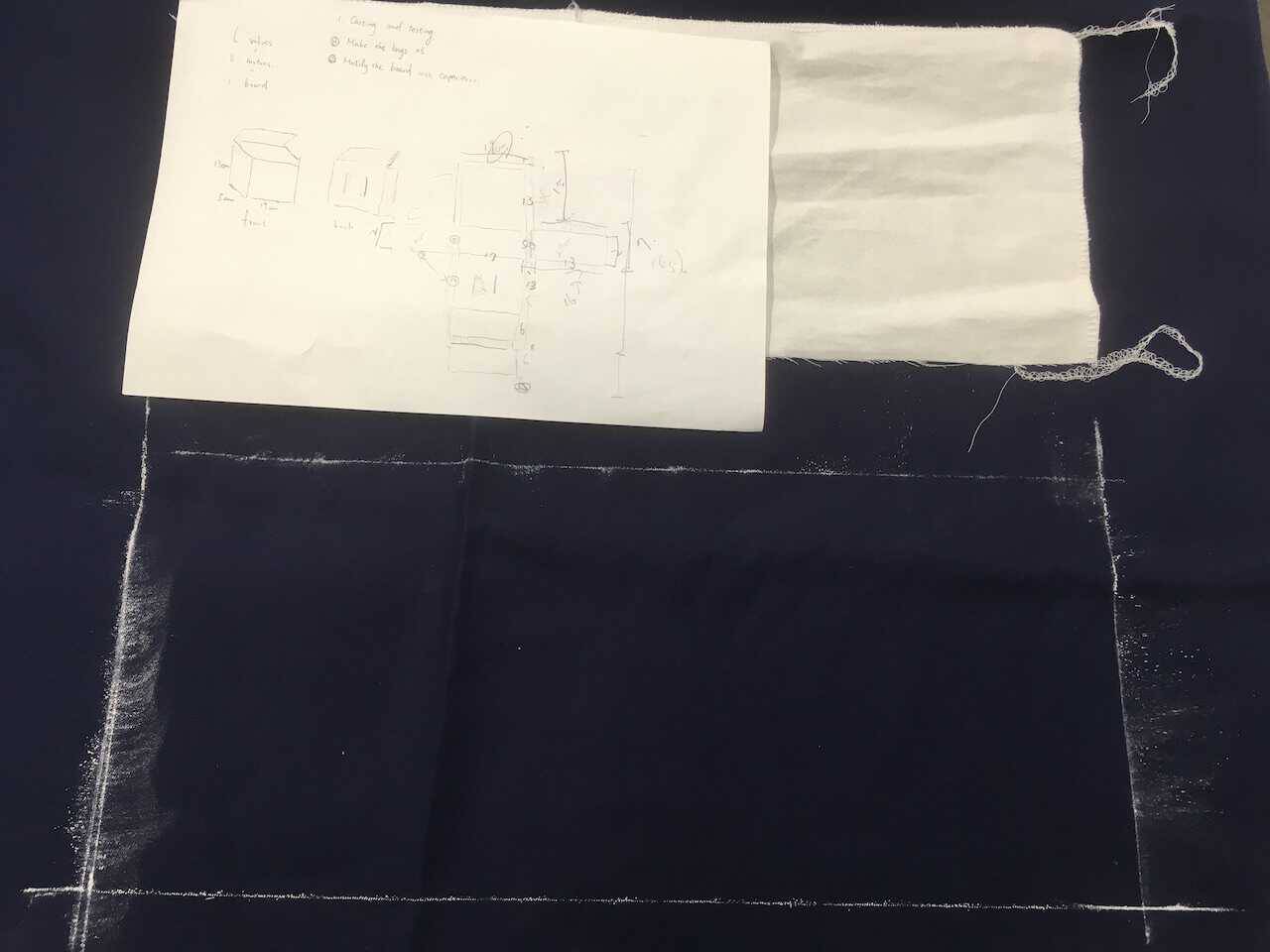 Follow the patterns to cut the fabrics
Follow the patterns to cut the fabrics
 Small piece of fabric for the belt
Small piece of fabric for the belt
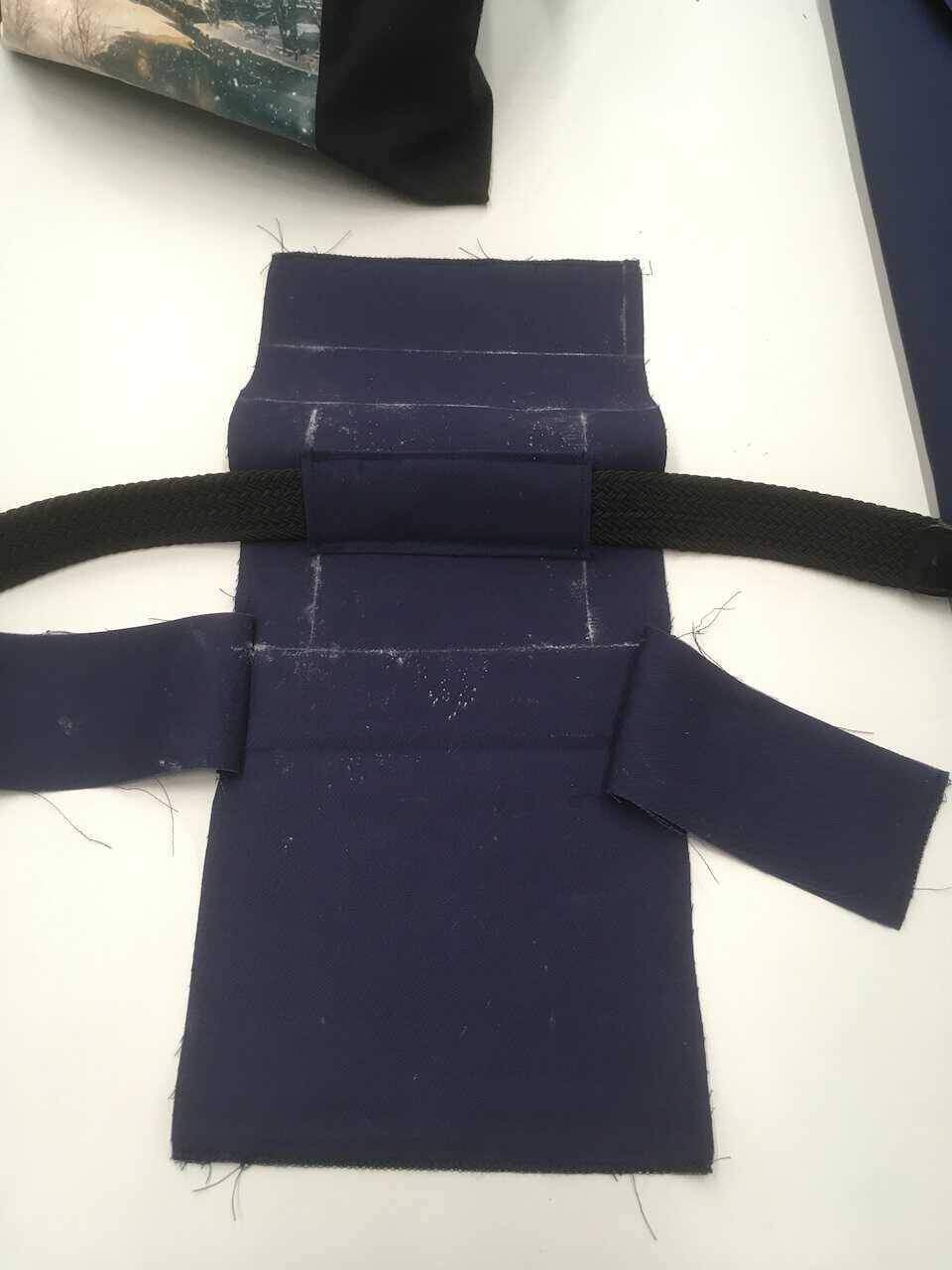 The belt matches with the bag perfectly
The belt matches with the bag perfectly
Hero Shots of Bags and Belt
 Front Side of Bag
Front Side of Bag
 Back Side of Bag
Back Side of Bag
 Wear it up
Wear it up
Mounting Station for Pumps, Valves, and PCB.
Hero Shot of Mounting Stations
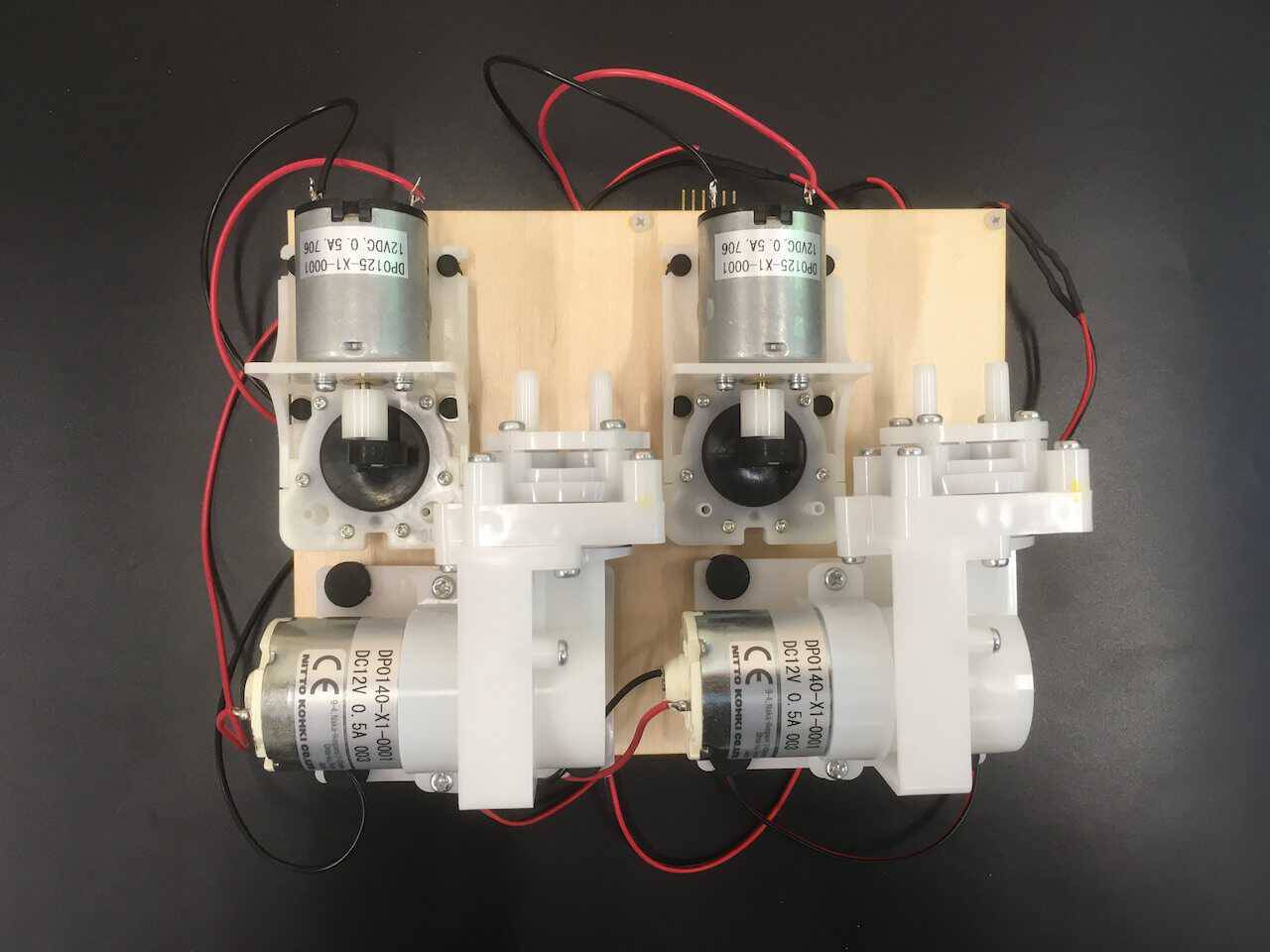 Pumps Side of Station
Pumps Side of Station
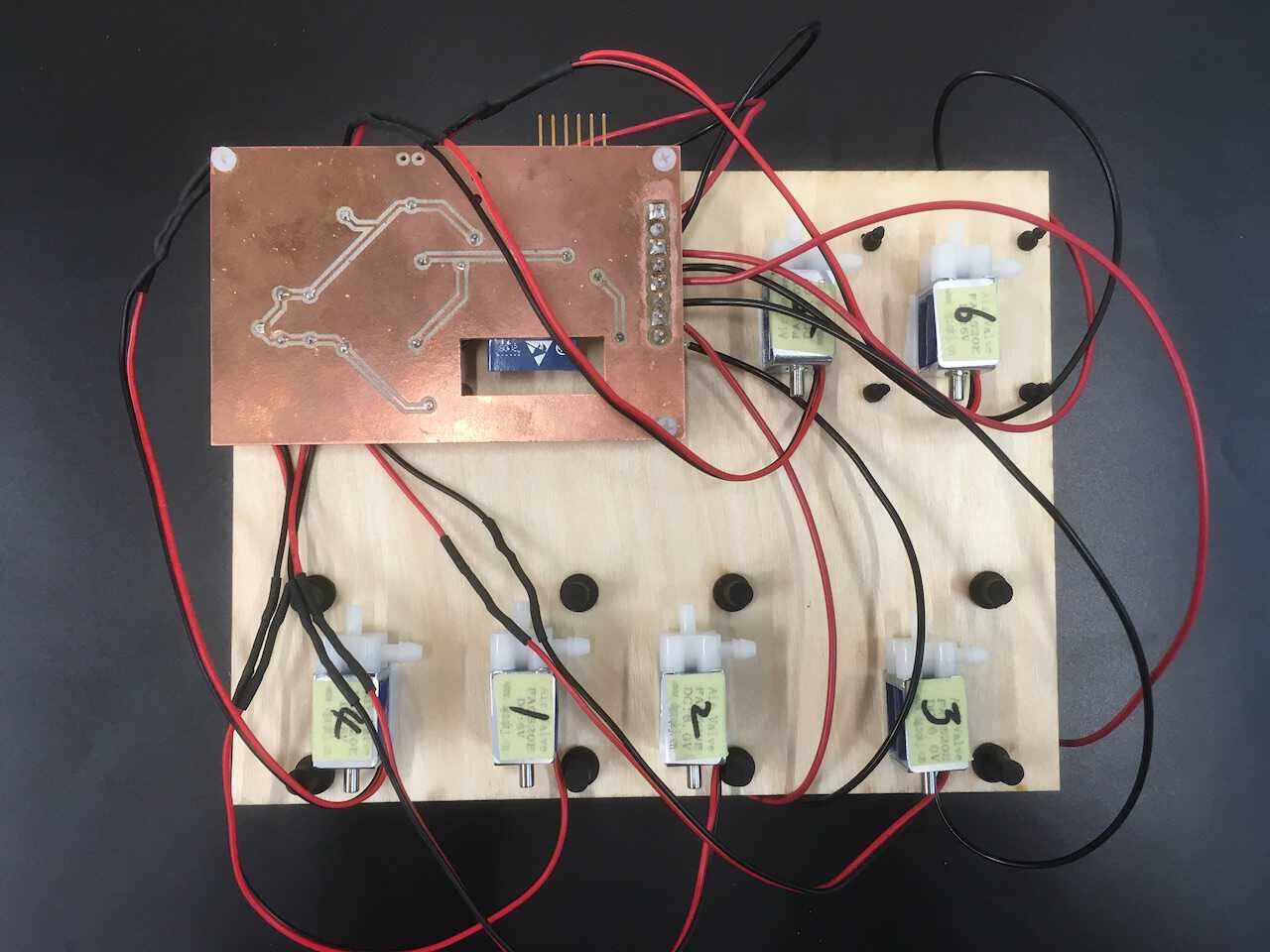 Valves Side of Station
Valves Side of Station
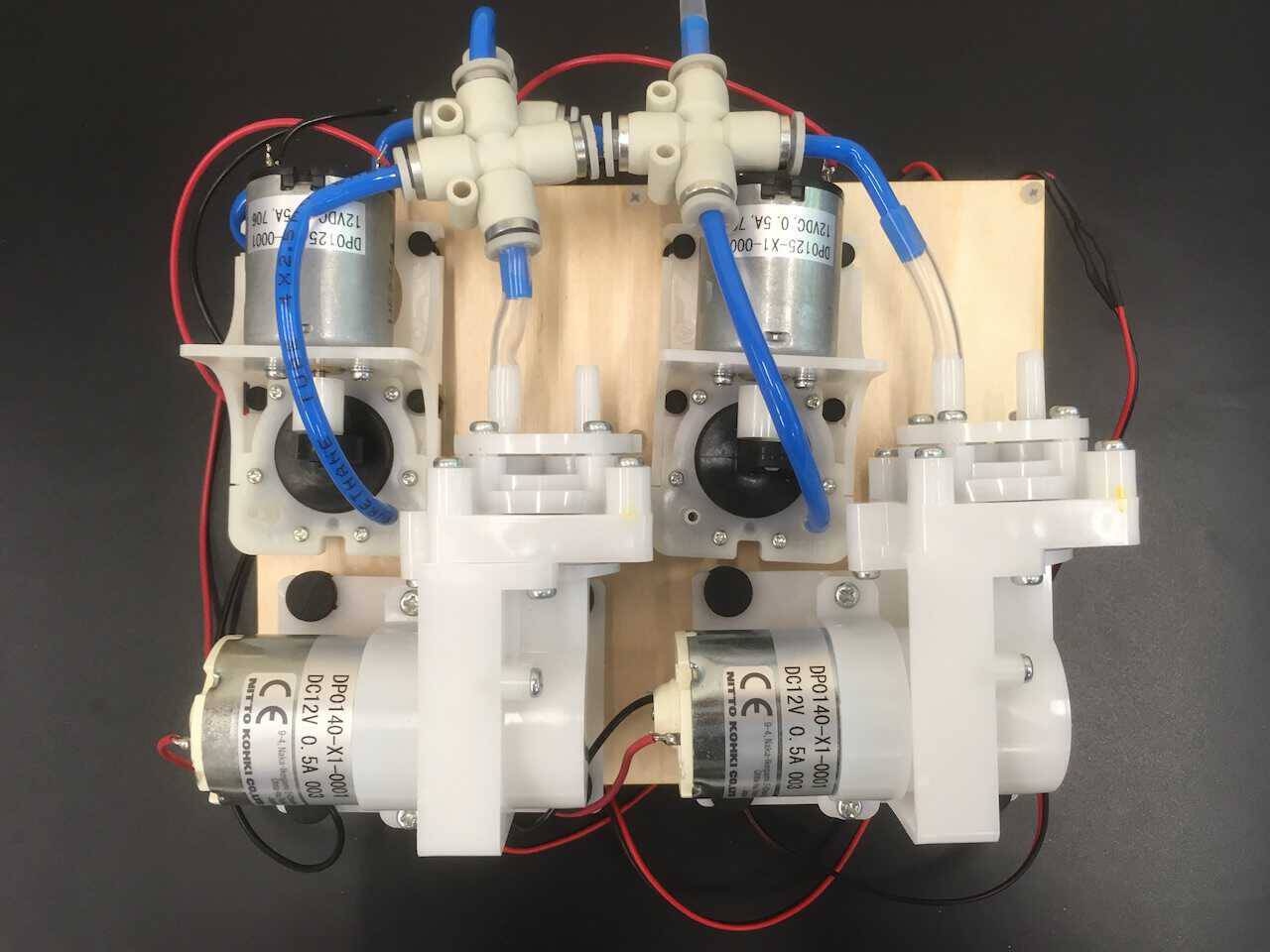 Add tubings
Add tubings
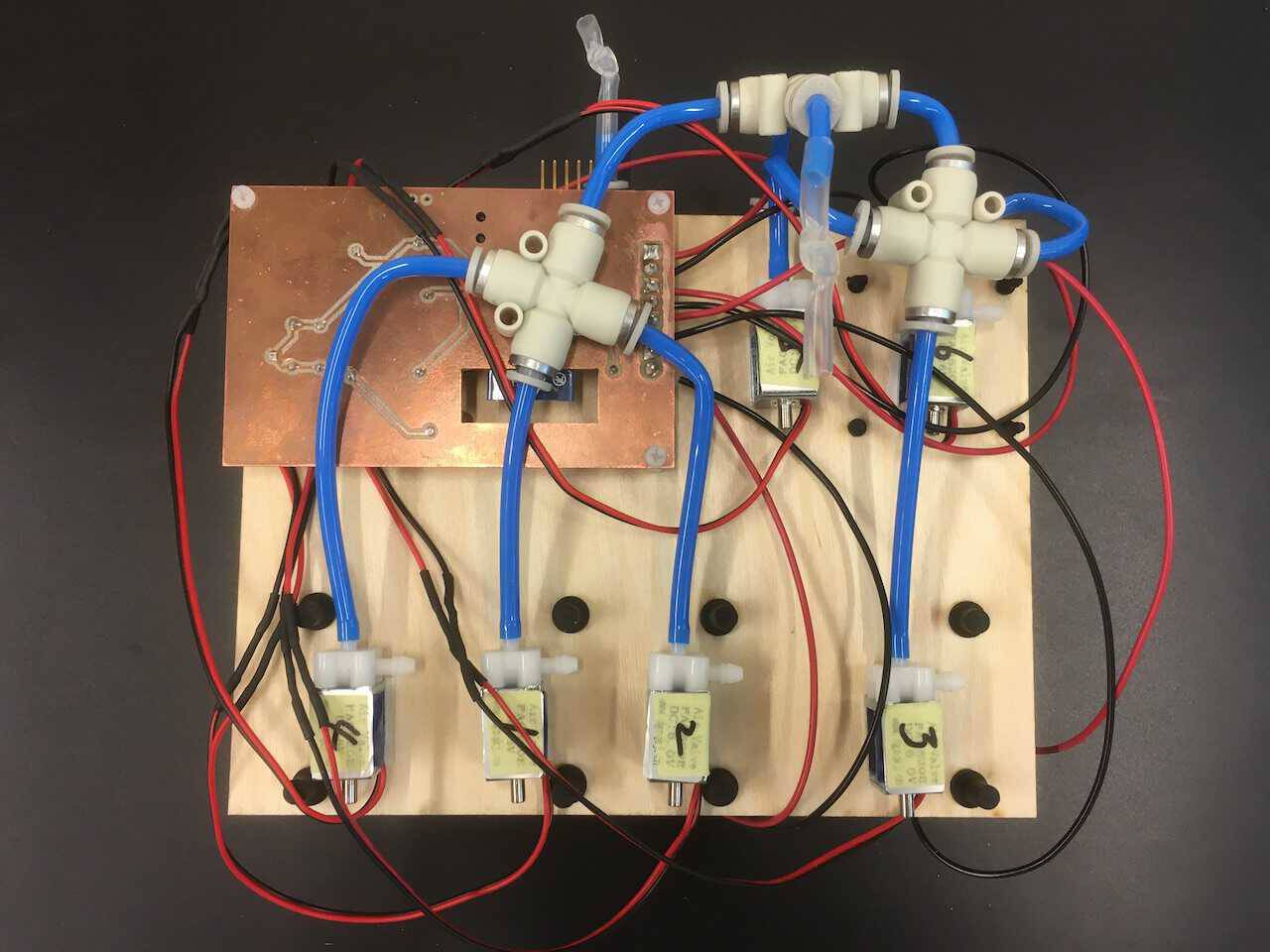 Add tubings
Add tubings
 Jacket + Vacuum Bags / Pumps + Valves + Tubings in Bags + Belt
Jacket + Vacuum Bags / Pumps + Valves + Tubings in Bags + Belt
 T-shirt + Sensors + Bags
T-shirt + Sensors + Bags
Step Response Sensors in Silicone
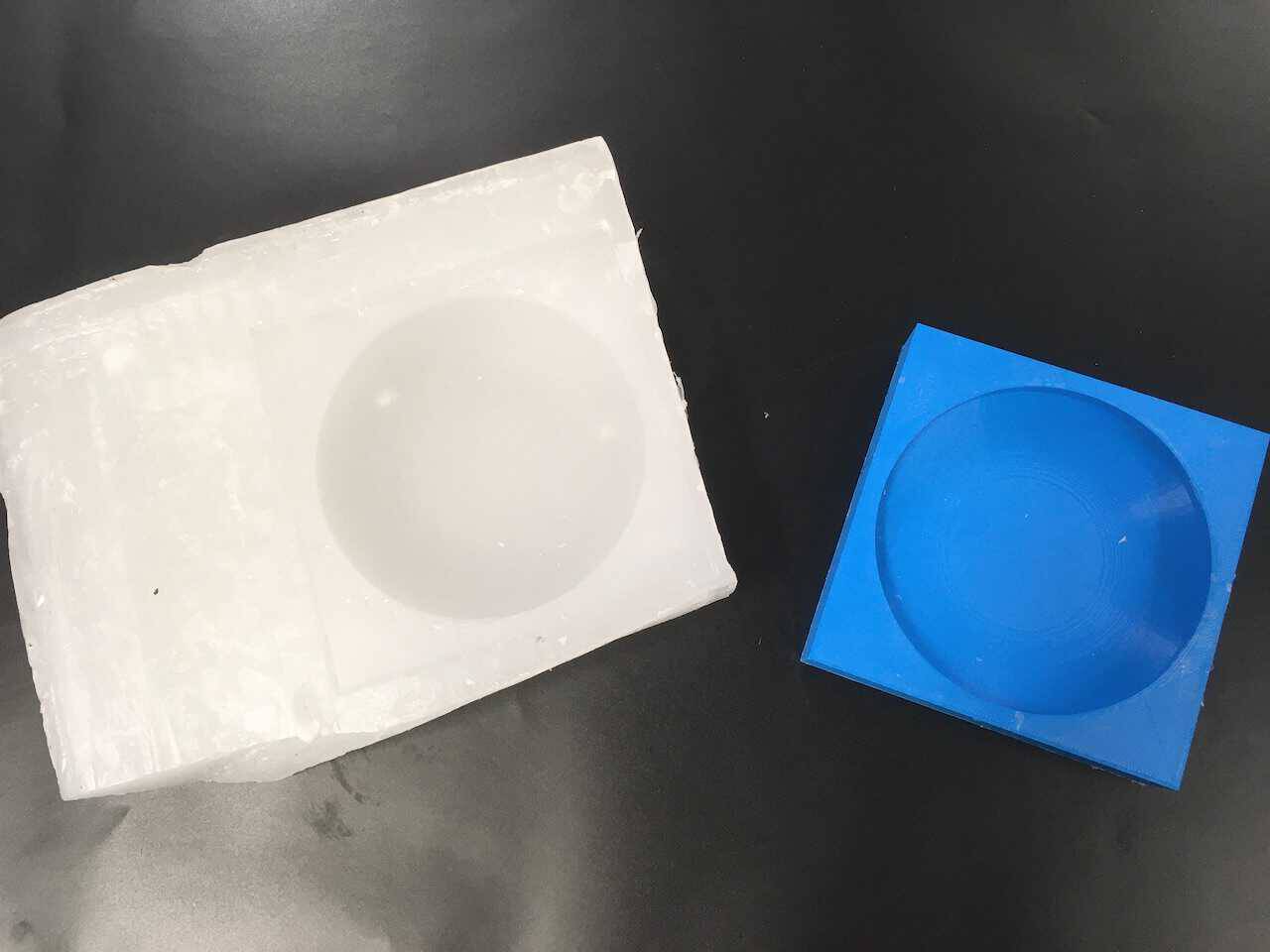
I milled and 3D printed two molds to cast my sensors. I found that milling a wax mold was more efficient and accurate than printing a 3D-printed mold. Also, the surface of the wax mold was smoother, providing a better quality finish. The experience in Week 13: Molding and Casting, taught me that I should use talcum powder or flour before casting, which makes it easier to take off the silicone after it has cured.
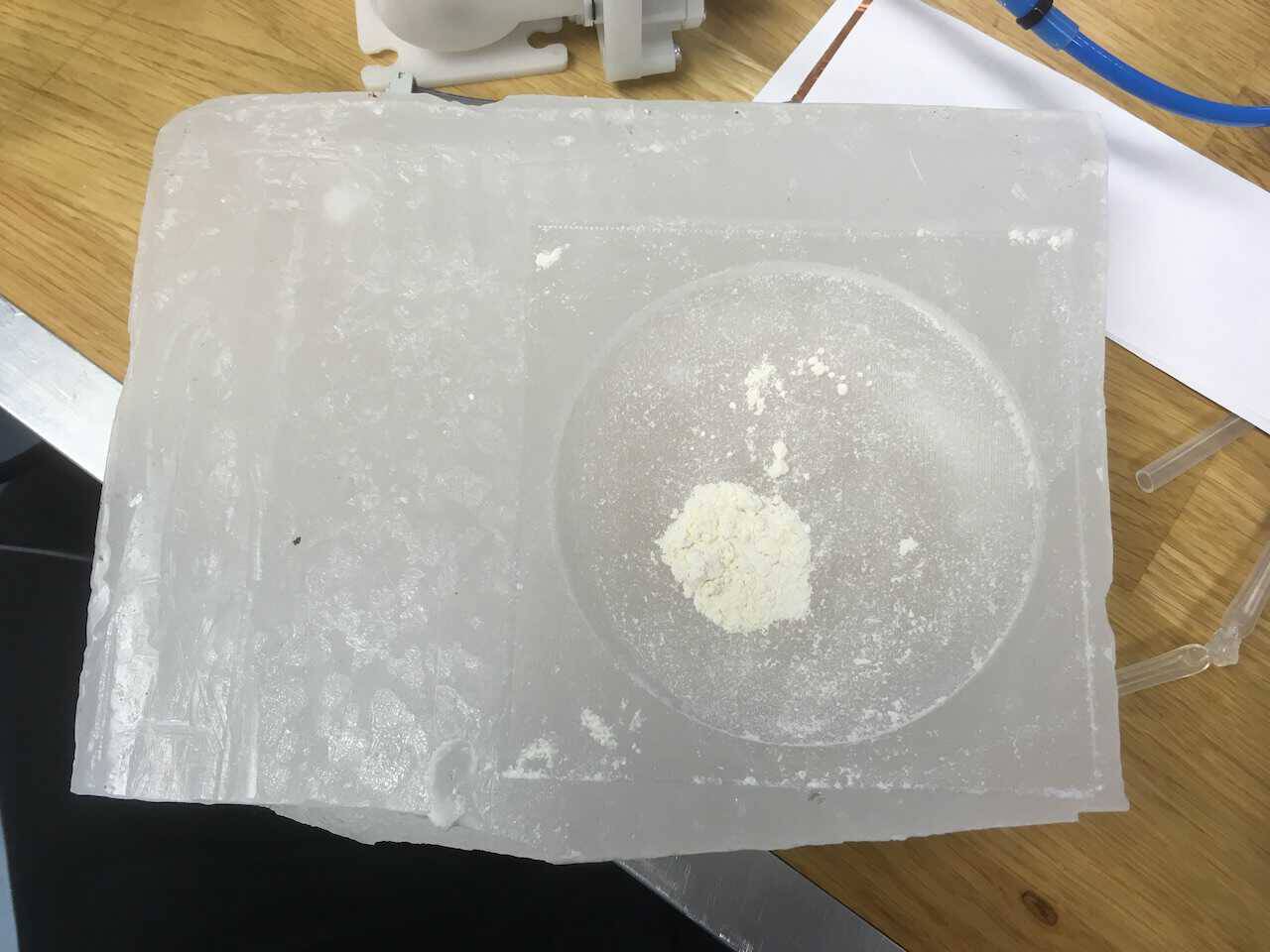 Add some flour
Add some flour
 First layer cast
First layer cast
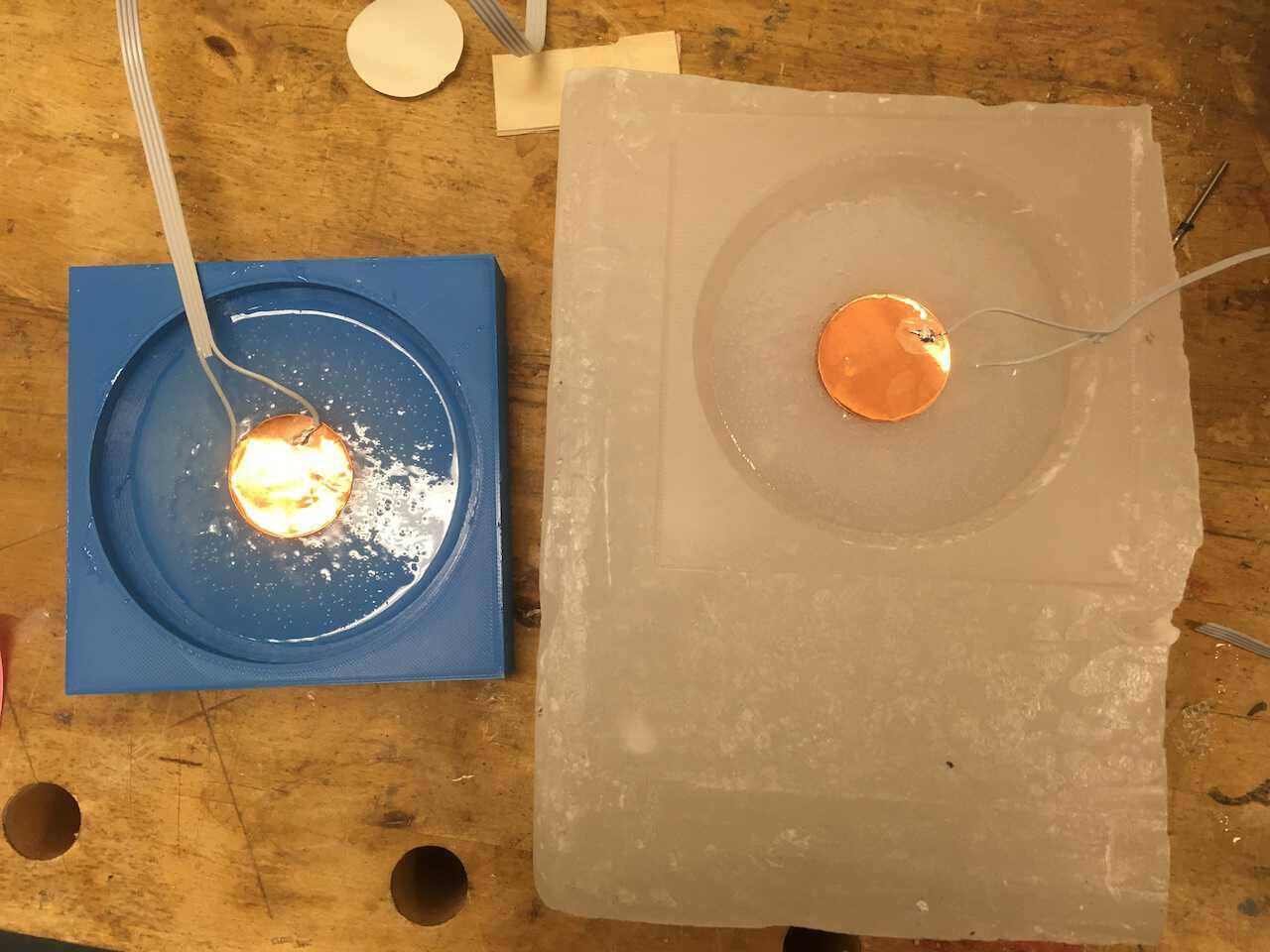
 After the first layer has cured, attached the copper sheet and casted the second layer of silicone
After the first layer has cured, attached the copper sheet and casted the second layer of silicone
 After the second layer has cured, attached the second copper sheet and casted the third layer
After the second layer has cured, attached the second copper sheet and casted the third layer
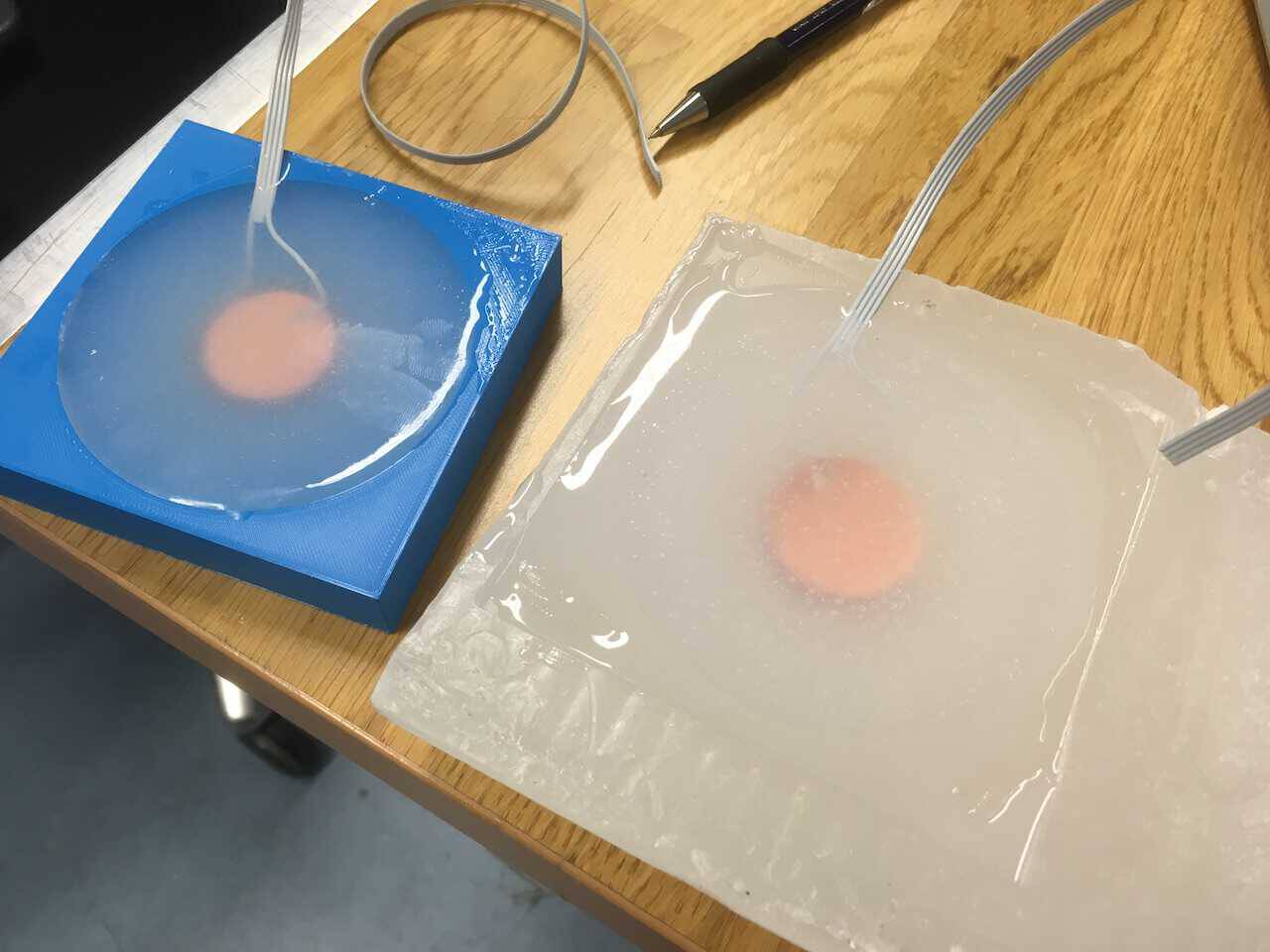 It's done!
It's done!
Testing the Step Response Sensor
The video clearly shows that even when my hand just hovered above the sensor, the sensor could still detect it. This oversensitivity led to the movement of hugs couldn’t be detected correctly. The issue and the solutions are explained more in the Challenges Section.
Hero Shots of Step Response Sensor

PCBs and ESP communication
Power Management Calculation
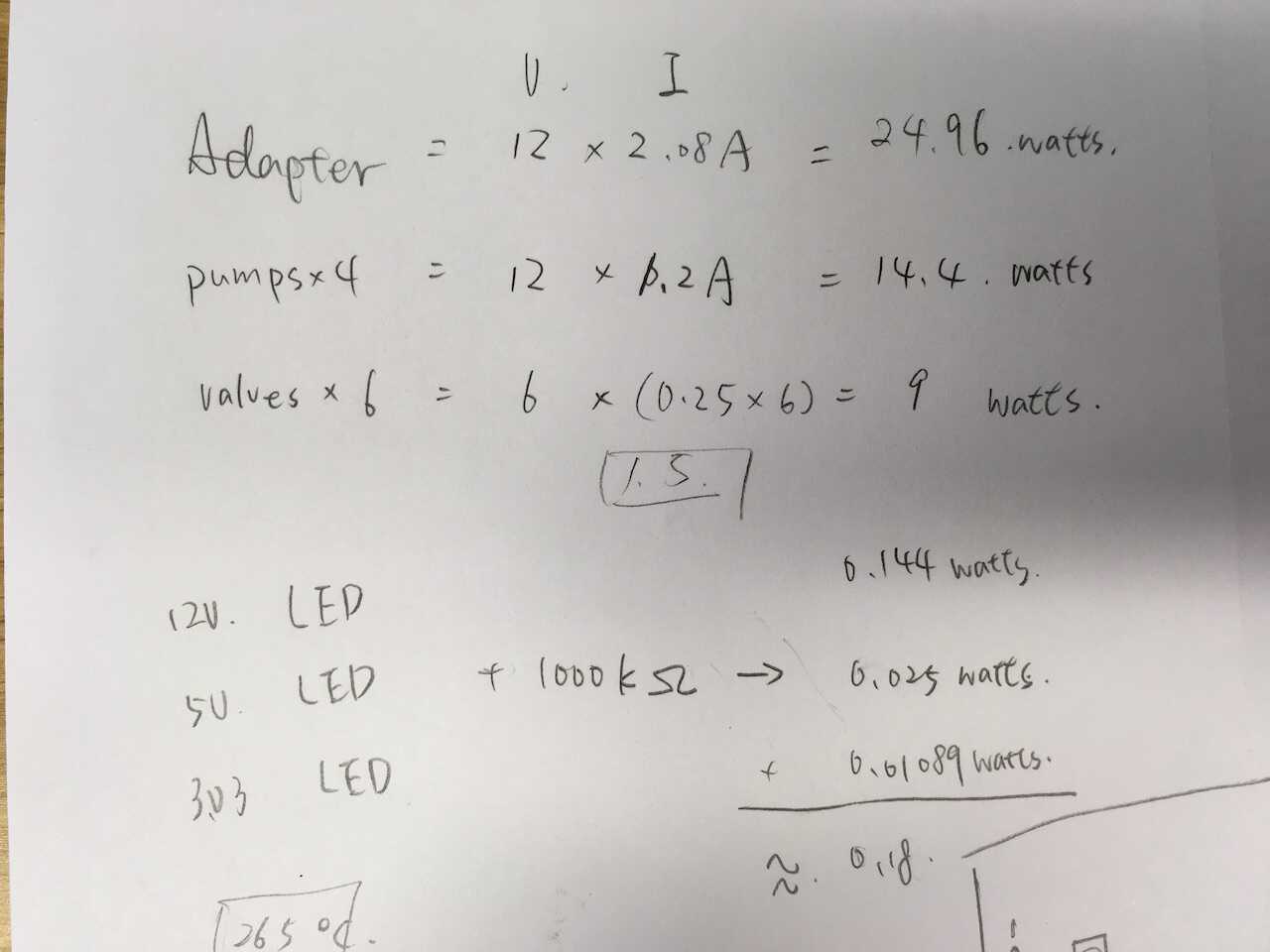
The power supply (adapter) can provide a total of 24.96 watts, which is only just sufficient for the power requirements of 6 pumps, 6 valves, and 2 attenuations. It was lucky that this did not lead to any problems in the final assembly. But if I had had more time to improve the final project, I would have preferred to build a safer, steadier, and higher power supplier.
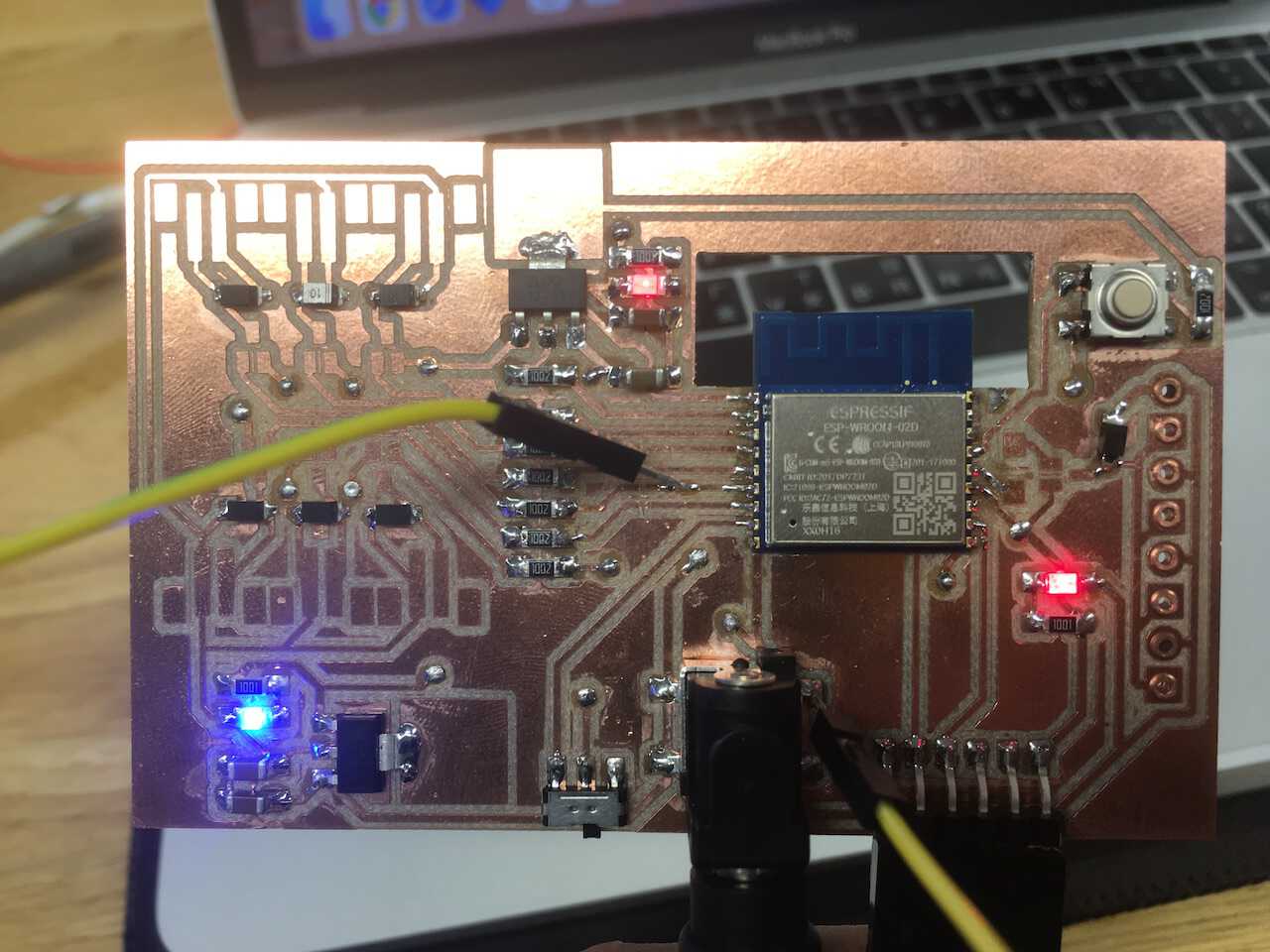
Mainboard
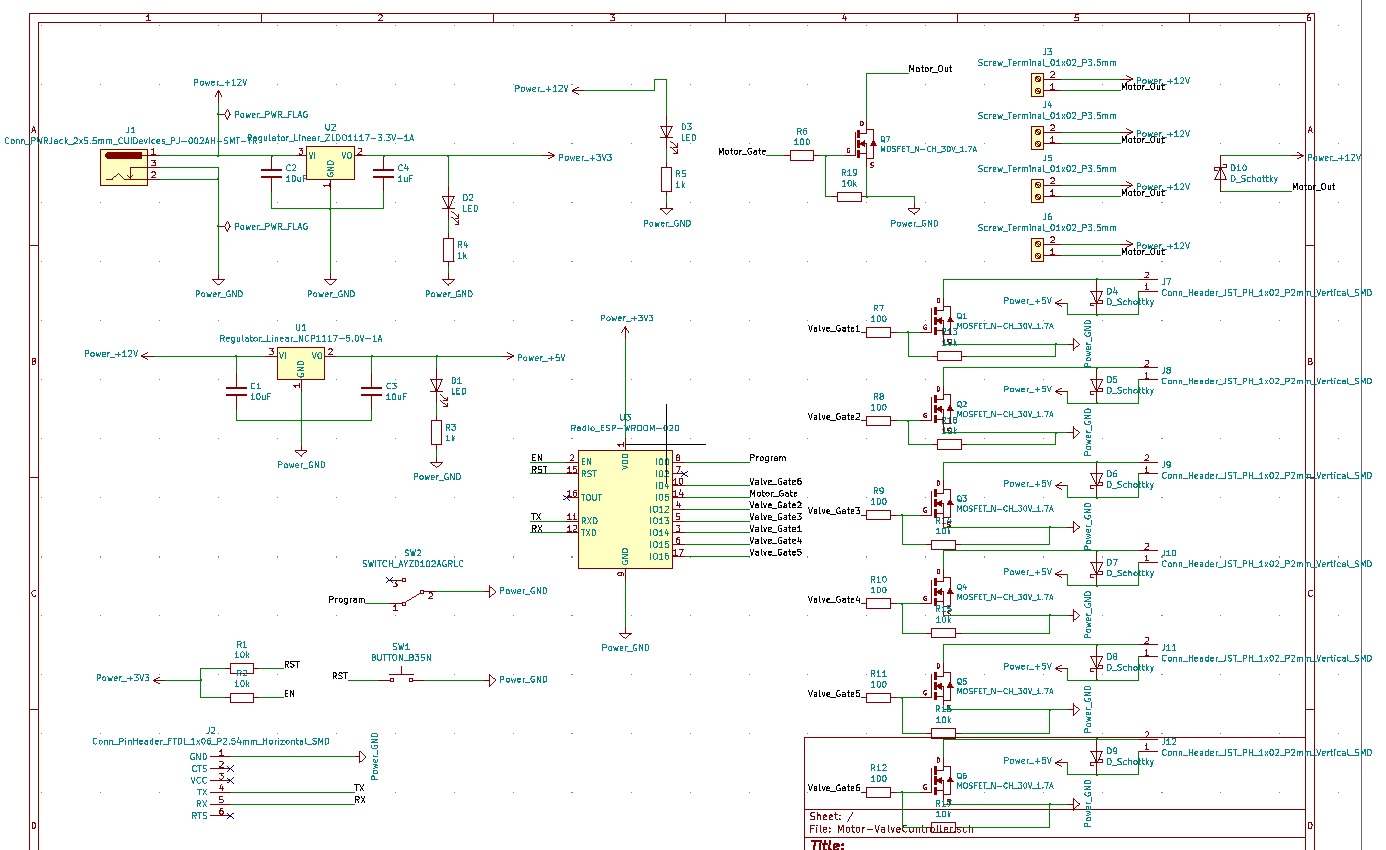
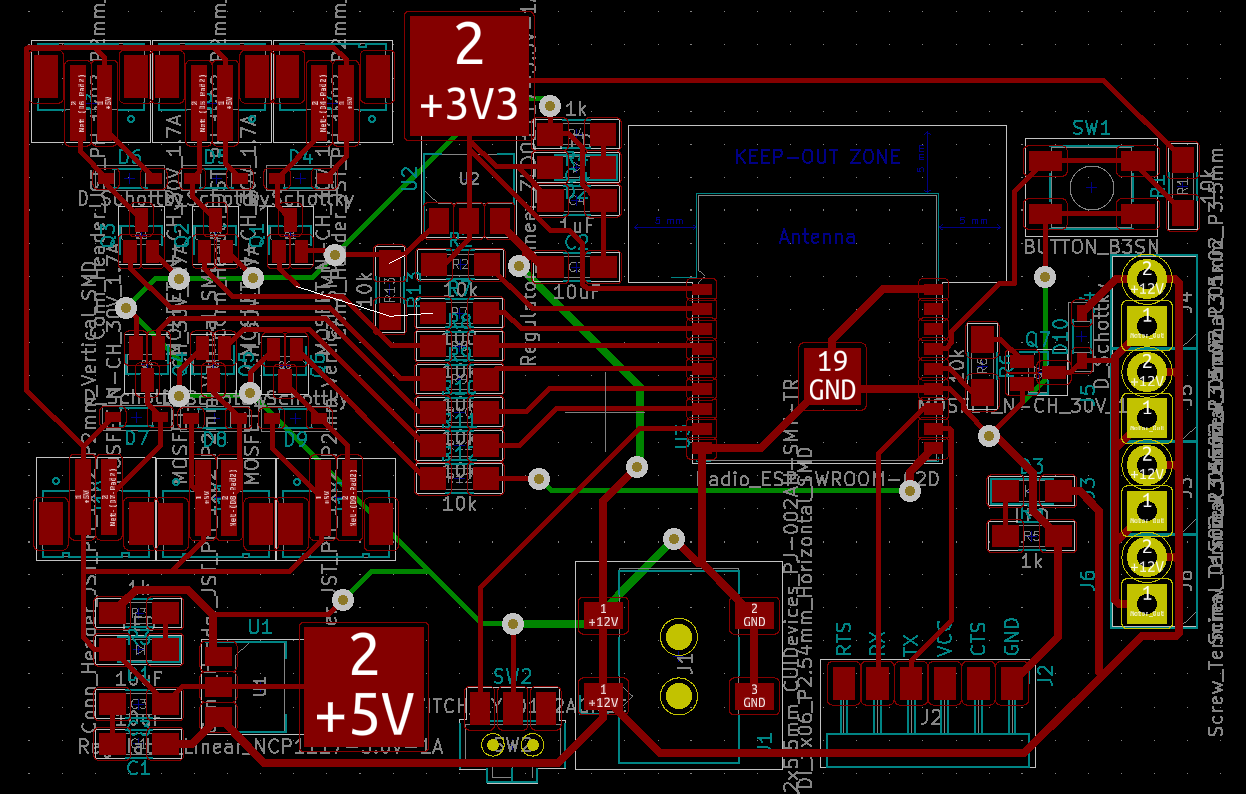
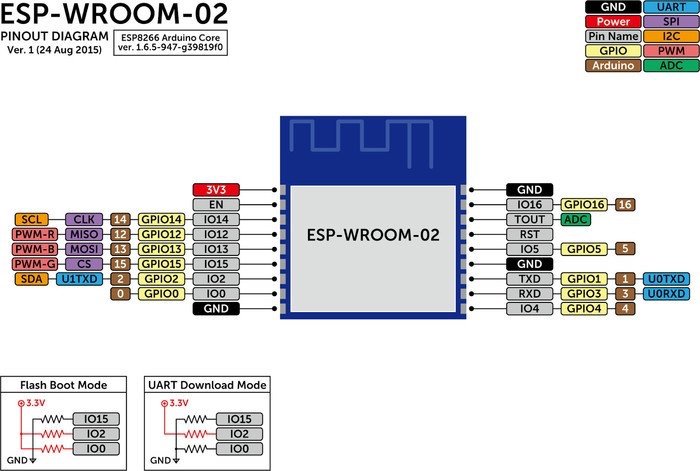
In order for the mainboard and secondary boards to communicate wirelessly, I chose an ESP-Wroom-02D module as my microcontroller. I followed the instructions from Getting Started with ESP-WROOM-02.
Kickback Diodes, Pull-Down Resistors and Block the VCC of FTDI

-
In order to protect the N-MOSFETs from the reverse current of pumps and valves, I added Schottky Diodes for each pin as a Kickback Diode. The cathode of a diode should be connected to the positive side of the voltage source (VCC); otherwise, it can not work.
-
Pull-down resistors are also critical to ensure all the IO pins are clear (not floating) while programming. IO15, in particular, must be pulled down (connect to GND) while uploading the code.
-
Also because I had a 12V external power supply, I didn’t need the power from FTDI. The VCC from FTDI was not enough and also unsteady. I found that it was fine to block the VCC from FTDI after reading a discussion titled Connecting external power and FTDI adapter?.
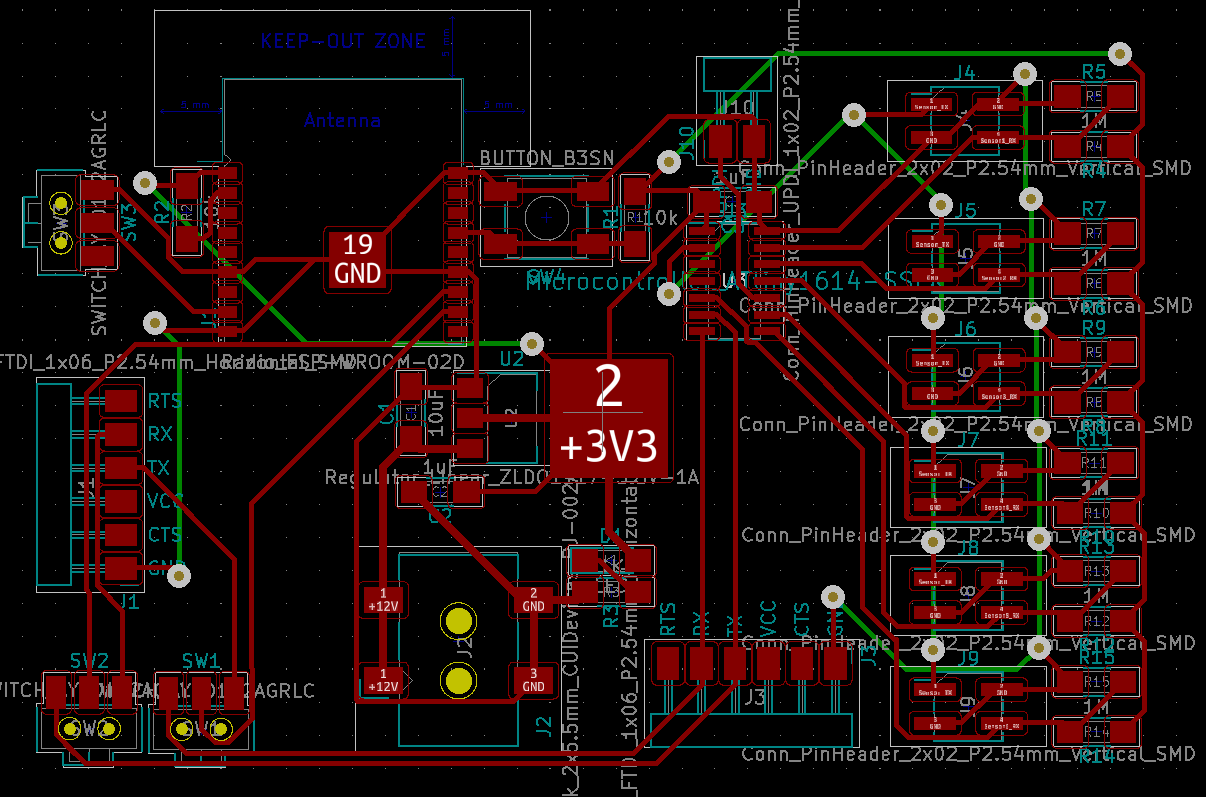
Secondary Board
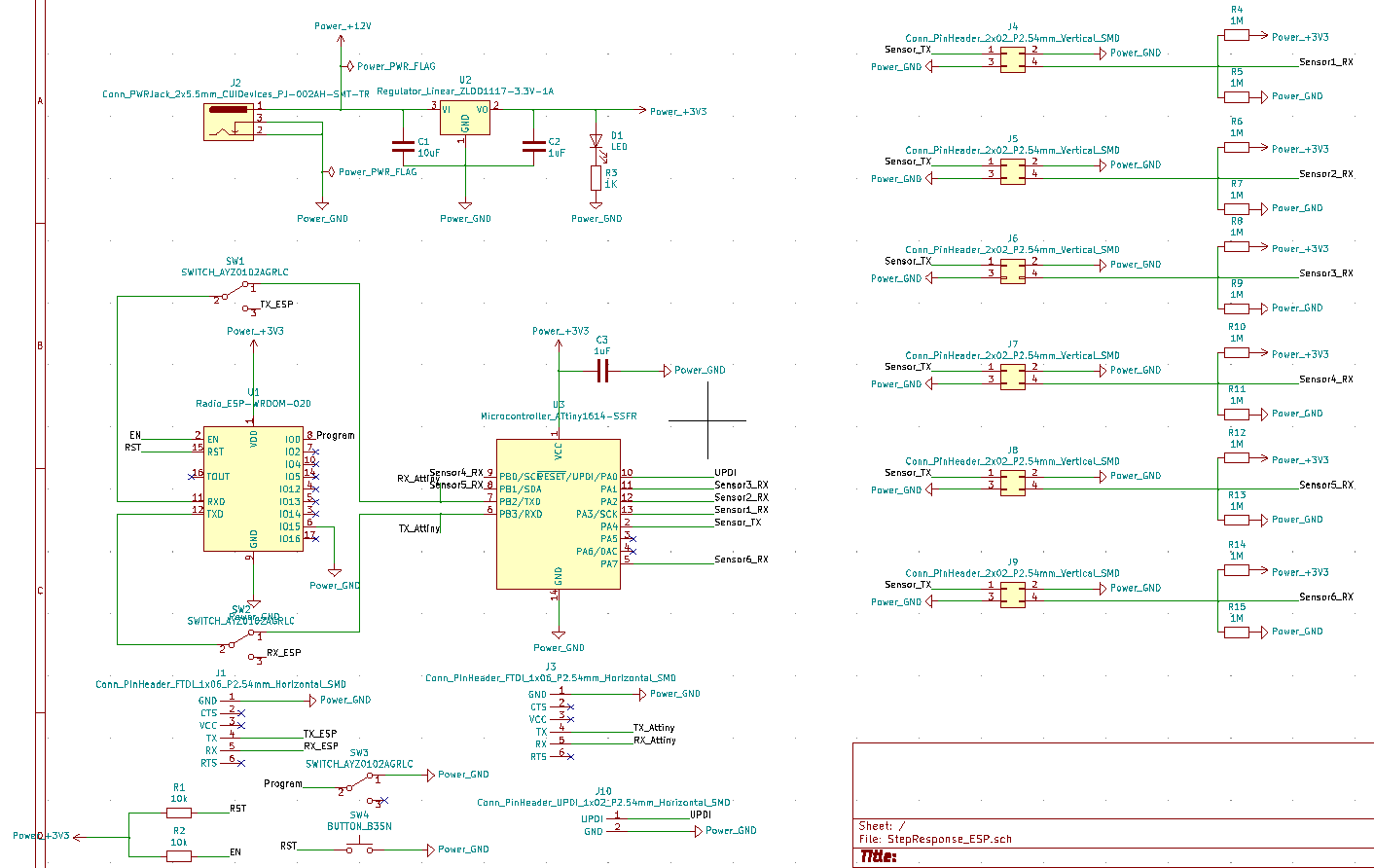
The difficulty of the secondary board was that ESP-WROOM-02D only has one analog read Pin. The solution that came to mind was to use an ESP-32 CAM that has more analog read pins; please see the pinout explanation in AI-Thinker Pinout Guide. But later I found a note said that: “ADC2 pins cannot be used when Wi-Fi is used. So, if you’re using Wi-Fi and you’re having trouble getting the data from an ADC2 GPIO, you may consider using an ADC1 GPIO instead, that should solve your problem.” But in the ESP-32 Cam breakout module, all the ADC1 GPIO were occupied by the camera.
Just when I was frustrated, another idea came to mind. I could add another microcontroller (Attiny1614) that only serves for analog read and later send the data through a Serial Port to ESP-WROOM-02D which communicates with the mainboard via Wifi. And it worked! But to ensure the TX and RX communication wouldn’t interfere with each other, Matti advised me to add a switch for each channel. So whenever I program or debug with FTDI I can switch off the TX and RX in between two boards and switch it on when I want them to communicate.
Hero Shots of PCBs
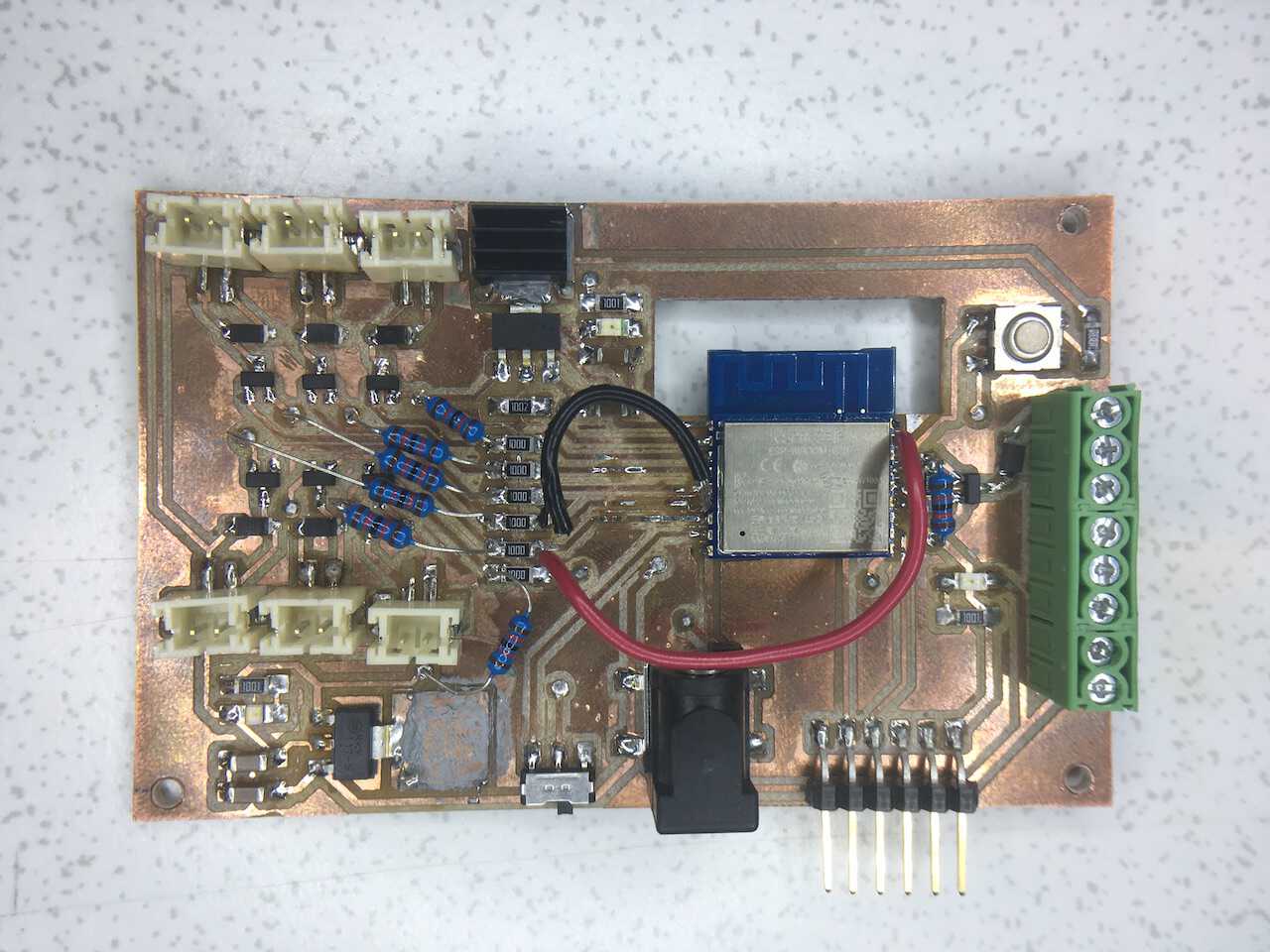 Main Board
Main Board
If you watch the video carefully, you will notice that the vacuum bag was inflated and deflated gradually.
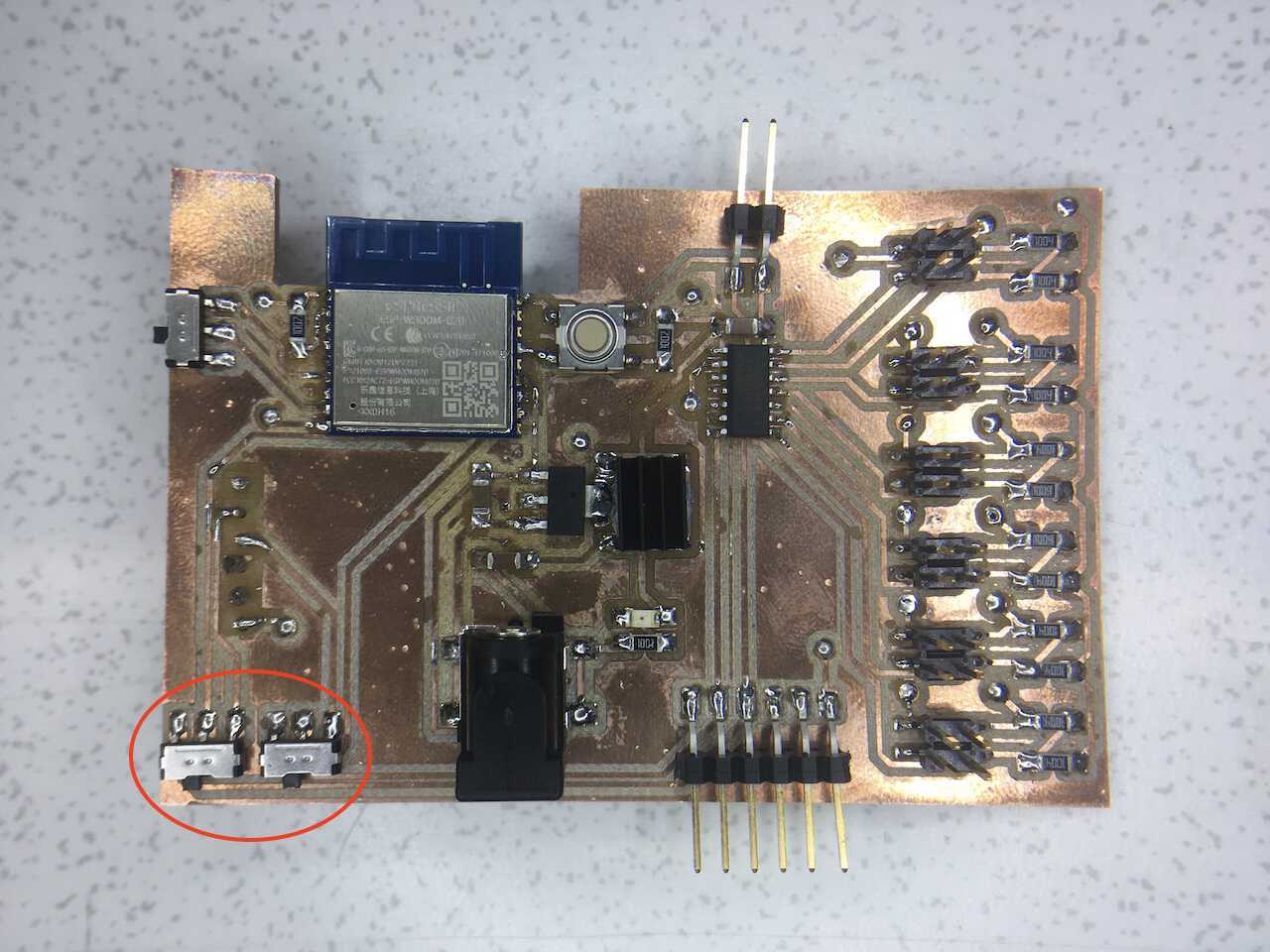
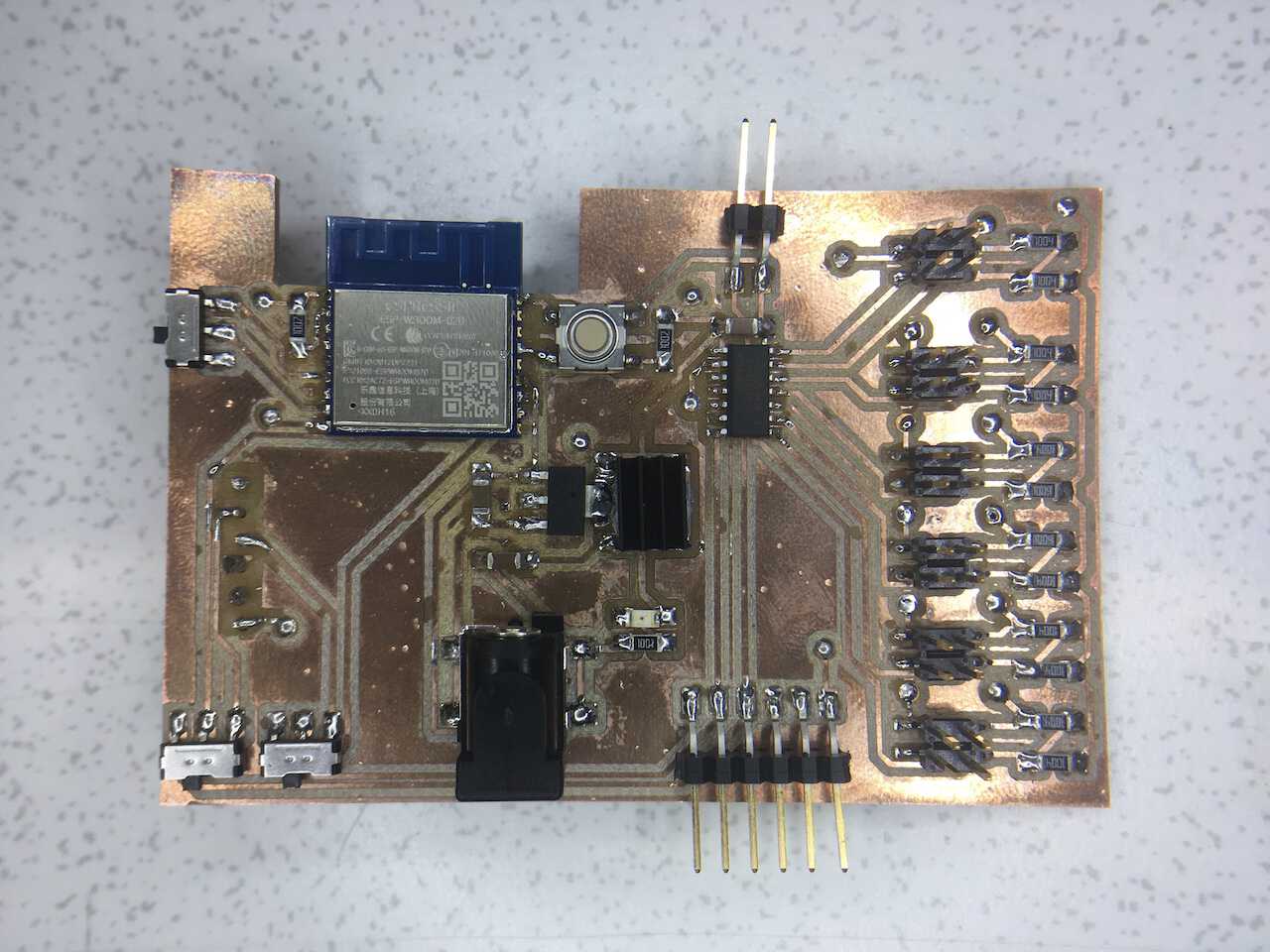 Secondary Board, Attiny1614 + ESP-WROOM-02D
Secondary Board, Attiny1614 + ESP-WROOM-02D
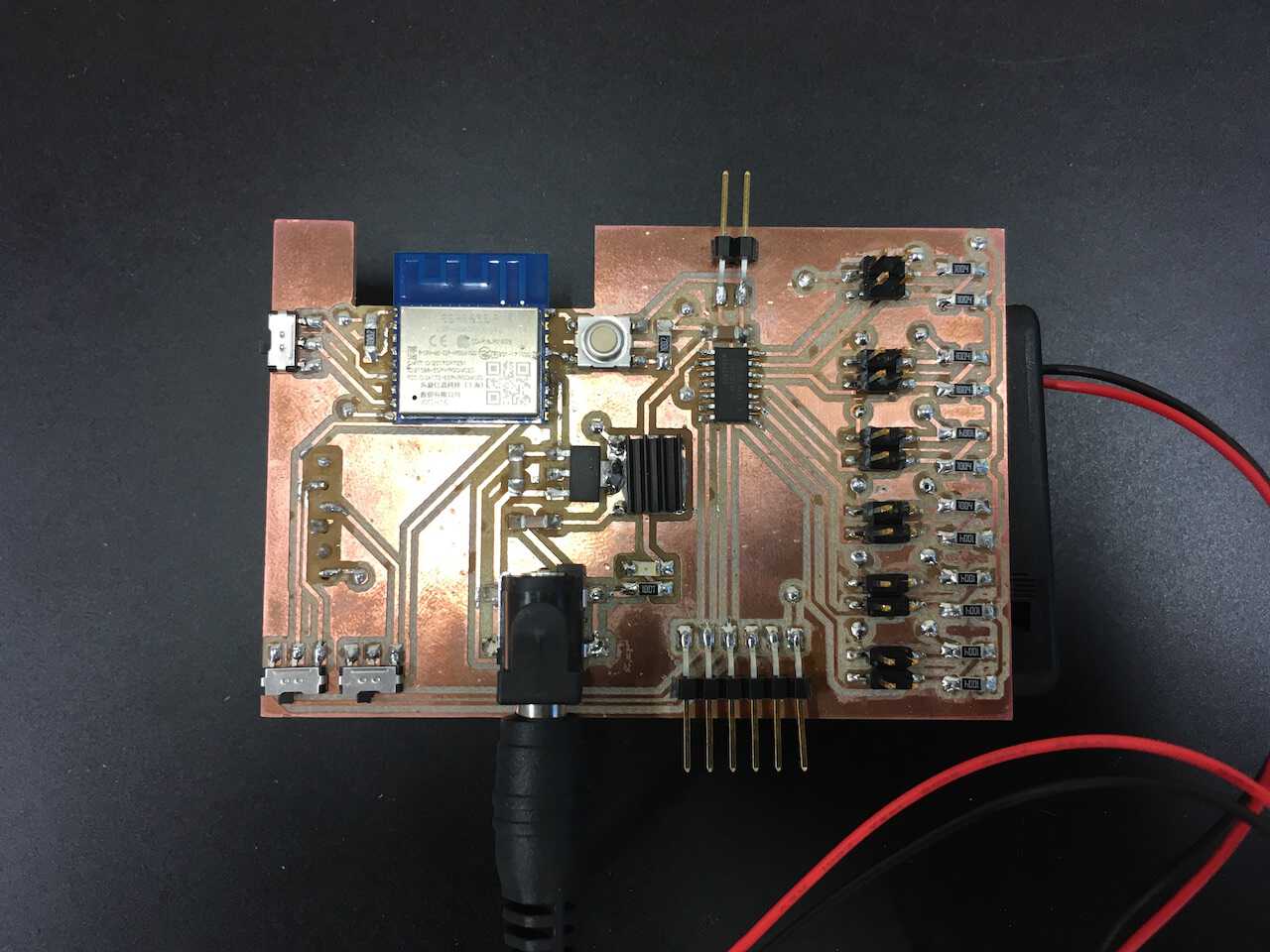 Power with AA Battery and its holders
Power with AA Battery and its holders
Networking Wifi AccessPoint and HTTP Client
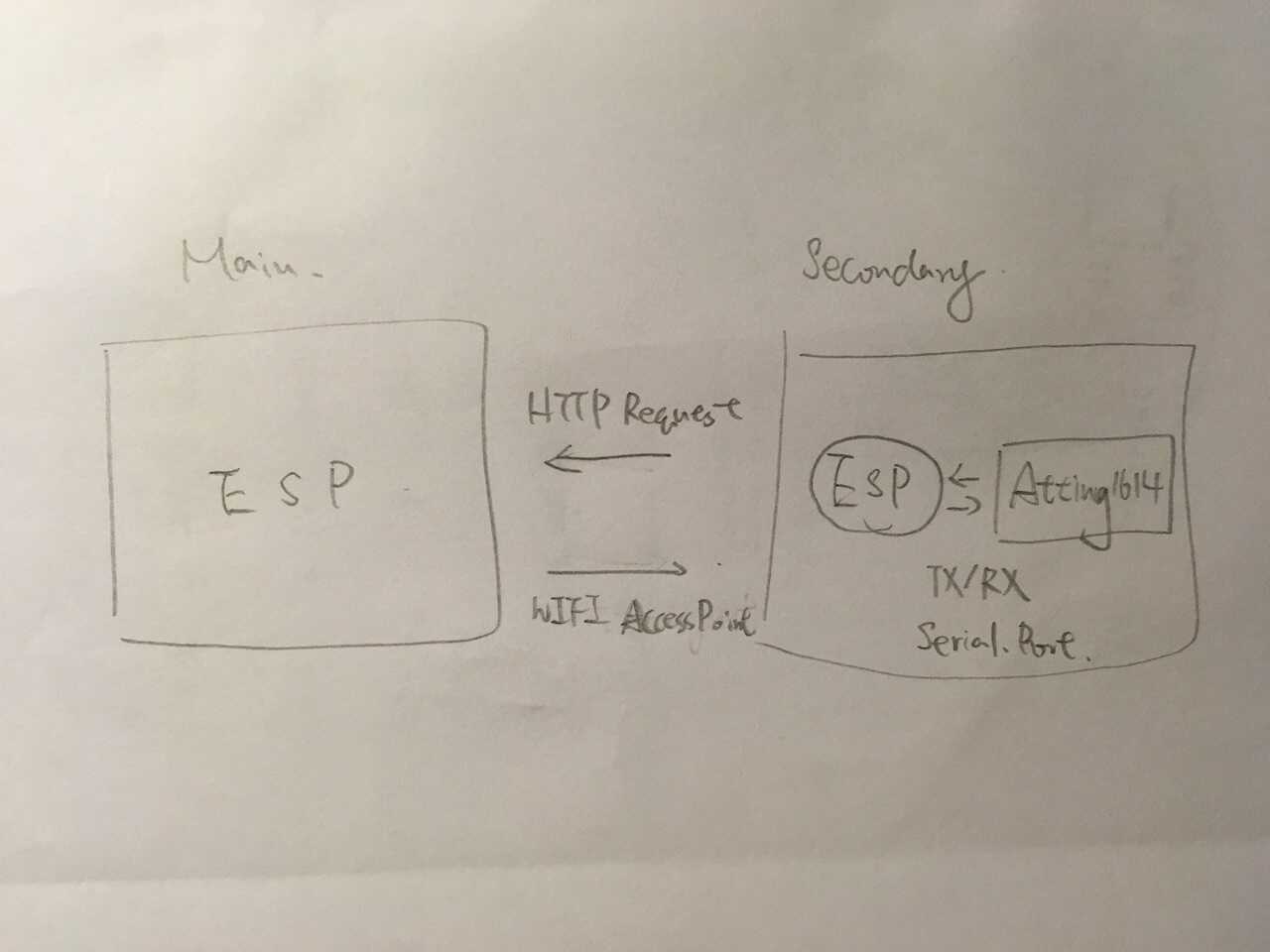
In the concept, I used ESP on the mainboard as a Wifi AccessPoint and ESP on the secondary as an HTTP Client that can send an HTTP request to change the status of the mainboard. On the secondary board, Attiny1614 would collect the analog data from step response sensors and send the command to ESP on secondary to determine which valves and pumps should be turned on or off.
Important Code on Attiny1614 of Secondary
The code was modified from Week12: Input Devices and Button Press was described in Week15: Networking and Communications. I will skip the repeated code and focus on the code created for the final project.
#define Sensor1_RX 10 // PA3 of the ATtiny1614
#define Sensor2_RX 9 // PA2 of the ATtiny1614
#define Sensor3_RX 8 // PA1 of the ATtiny1614
...
long timeBegin = 0;
long timeDelta = 100;
long Sensor1_Result_Begin = 0;
long Sensor1_Result_End = 0;
long Sensor2_Result_Begin = 0;
long Sensor2_Result_End = 0;
long Sensor1_Thresh = 200;
long Sensor2_Thresh = 300;
...
int sample = 100;
int Sensor1_Avr=0;
int Sensor2_Avr=0;
Define the pins to control the valves and pumps. Set timeBegin and timeDelta to read the analog data every 100 milliseconds. And set sample to collect 100 times of data whenever the program begins.
long normalize(int sensor_RX){
long sum=0;
long avr=0;
for(long i = 0 ; i < sample ; i++)
{
sum = sum + tx_rx(sensor_RX);
}
avr = sum/sample;
return avr;
}
void setup() {
...
Sensor1_Avr = normalize(Sensor1_RX);
Sensor2_Avr = normalize(Sensor2_RX);
}
The purpose of the normalize function is to calculate the average data of each sensor in the start of sensors.
void loop() {
long Sensor1_Result = (tx_rx(Sensor1_RX)-Sensor1_Avr);
long Sensor2_Result = (tx_rx(Sensor2_RX)-Sensor2_Avr);
long timeCurrent = millis();
if (timeBegin + timeDelta < timeCurrent) {
// This here is run only after each timeDelta
Sensor1_Result_End = Sensor1_Result;
if (Sensor1_Result_End - Sensor1_Result_Begin > Sensor1_Thresh) {
sendMessage(Sensor1_Address,B0001); //on
}
if (Sensor1_Result_Begin - Sensor1_Result_End > Sensor1_Thresh) {
sendMessage(Sensor1_Address,B0000); //off
}
// Reset value
Sensor1_Result_Begin = Sensor1_Result_End;
// This here is run only after each timeDelta
Sensor2_Result_End = Sensor2_Result;
if (Sensor2_Result_End - Sensor2_Result_Begin > Sensor2_Thresh) {
sendMessage(Sensor2_Address,B0001); //on
}
if (Sensor2_Result_Begin - Sensor2_Result_End > Sensor2_Thresh) {
sendMessage(Sensor2_Address,B0000); //off
}
// Reset value
Sensor2_Result_Begin = Sensor2_Result_End;
// Reset timer
timeBegin = timeCurrent;
}
...
}
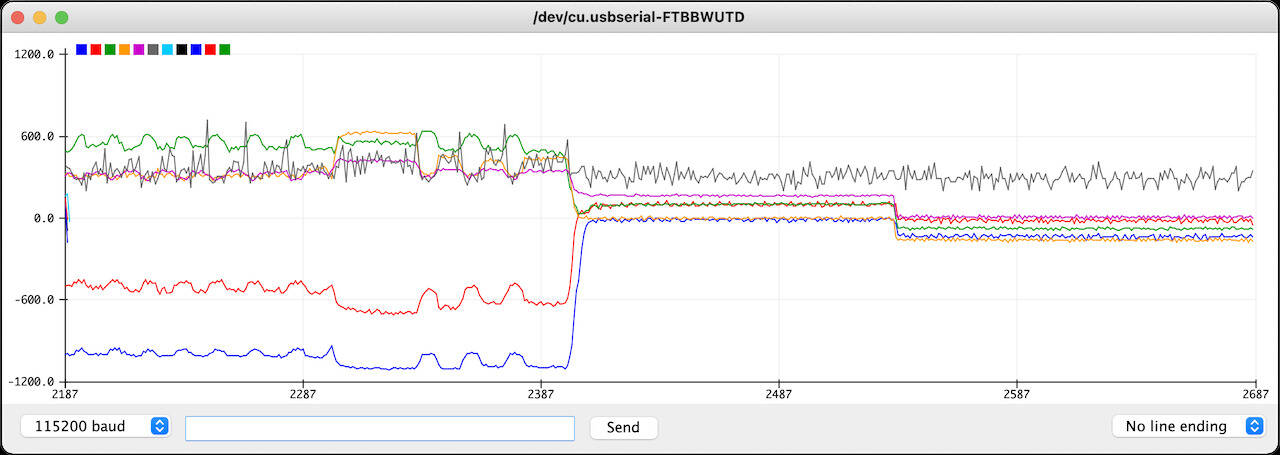
This part of the code is detecting if the changes of the data are bigger than the sensor thresholds which were observed from the Serial Plotter of the raw data.
Important Code on ESP of Secondary (HTTP Client)
Parts of the code were modified from the DCMotor Driver described in Week15: Networking and Communications and the template of ESP8266 Basic Http Client. I will skip the repeated code and focus on the code created for final project.
#include <Arduino.h>
#include <ESP8266WiFi.h>
#include <ESP8266WiFiMulti.h>
#include <ESP8266HTTPClient.h>
#include <WiFiClient.h>
ESP8266WiFiMulti WiFiMulti;
To use the HTTP Client function, we have to include the above libraries.
void setup() {
...
WiFi.mode(WIFI_STA);
WiFiMulti.addAP("ESPap", "thereisnospoon");
}
ESPap will become the Wifi name, and "thereisnospoon" will be the Wifi passwords.
void loop() {
if ((WiFiMulti.run() == WL_CONNECTED))
{
WiFiClient client;
HTTPClient http;
if (Serial.available() > 0)
{
...
if (address == B0000) // sensor1
{
if (command == B0001) //sensor1_ON
{
Serial.print("Turn ValveFront on...\n");
if (http.begin(client, "http://192.168.4.1/valveFront/on")) {
int httpCode = http.GET();
if (httpCode > 0) {
Serial.printf("[HTTP] GET... code: %d\n", httpCode);
if (httpCode == HTTP_CODE_OK || httpCode == HTTP_CODE_MOVED_PERMANENTLY) {
String payload = http.getString();
Serial.println(payload);
}
} else
{
Serial.printf("[HTTP] GET... failed, error: %s\n", http.errorToString(httpCode).c_str());
}
http.end();
} else
{
Serial.printf("[HTTP} Unable to connect\n");
}
Serial.print("Turn Pump on...\n");
...
if (command == B0000) //sensor1_OFF
{
Serial.print("Turn ValveFront off...\n");
...
Serial.print("Turn Pump off...\n");
...
}
}
if (address == B0001) // sensor2
{
if (command == B0001) //sensor2_ON
{
...
Serial.print("Turn Pump on...\n");
...
}
if (command == B0000) //sensor2_OFF
{
...
Serial.print("Turn Pump off...\n");
...
}
}
}
}
}
In the loop, there are two conditions for each valve, on and off, according to the address. Whenever the valve is activated, the pumps are turned on as well. All of them will send a HTTP request: "http://192.168.4.1/..." to the access point (mainboard).
Important Code on ESP of Main Board (Wifi Accesspoint)
Part of the code was modified from the DCMotor Driver described in Week15: Networking and Communications and the template of ESP8266 Wifi Accesspoint. I will skip the repeated code and focus on the code created for the final project.
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#define pump 5
#define valve1 14
...
#ifndef APSSID
#define APSSID "ESPap"
#define APPSK "thereisnospoon"
#endif
...
Include the libraries that we need for the Wifi Server and define the pins for pumps and valves. Also define the passwords for this Access Point.
void handleRoot() {
server.send(200, "text/html", "<h1>You are connected</h1>");
}
void handlePumpOn() {
digitalWrite(pump, HIGH);
server.send(200, "text/html", "Pump is on!");
}
void handlePumpOff() {
digitalWrite(pump, LOW);
server.send(200, "text/html", "Pump is off!");
}
void handleValveFrontOn() {
digitalWrite(valve1, HIGH);
digitalWrite(valve2, HIGH);
digitalWrite(valve3, HIGH);
server.send(200, "text/html", "Valves Front are ON...");
}
void handleValveFrontOff() {
digitalWrite(valve1, LOW);
digitalWrite(valve2, LOW);
digitalWrite(valve3, LOW);
server.send(200, "text/html", "Valves Front are off...");
}
void handleValveBackOn() {
digitalWrite(valve4, HIGH);
digitalWrite(valve5, HIGH);
digitalWrite(valve6, HIGH);
server.send(200, "text/html", "Valves Back are ON...");
}
void handleValveBackOff() {
digitalWrite(valve4, LOW);
digitalWrite(valve5, LOW);
digitalWrite(valve6, LOW);
server.send(200, "text/html", "Valves Back are off...");
}
Here is the function for each status of valves and pumps, we will use them for the HTTP requests.
void setup() {
...
WiFi.softAP(ssid, password);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
server.on("/", handleRoot);
server.on("/pump/on", handlePumpOn);
server.on("/pump/off", handlePumpOff);
server.on("/valveFront/on", handleValveFrontOn);
server.on("/valveFront/off", handleValveFrontOff);
server.on("/valveBack/on", handleValveBackOn);
server.on("/valveBack/off", handleValveBackOff);
server.begin();
Serial.println("HTTP server started");
}
void loop() {
server.handleClient();
}
Instead of running the functions in the loop, we should set it up in setup. And that’s it!
Hero Shots and Final Project Test




Challenges
-
This was my first time to sew something. It was really challenging for me. But after the final project, sewing pockets, bags, and belts are no more a problem for me!

-
FLA took a long time to cure
!!Solution: Cook it. I tried steaming, baking, and boiling at 60°C. The results showed that boiling in 60°C water for 10 minutes was the best balance between hardening and the durable texture of my connectors.
??Reason: I figured out that the location of the UV lightbox was close to a heater that was turned on in winter but was now switched off, so it took longer to cure.
-
Air leak of vacuum bags
!!Solution: Instead of epoxy glue, I used rubber washers to fill up male and female connectors.
??Reason: Becasue epoxy glue hardens after drying


-
T-shirt was too loose to feel the hug
The original idea was to use a T-shirt as the main design for all the vacuum bags; however, in the testing section, I found that the T-shirt was too loose to hug me. So I switched to a fitted jacket with a belt, which could provide me a stronger and more realistic feeling of hugs.
-
The old valves are giant and inefficient
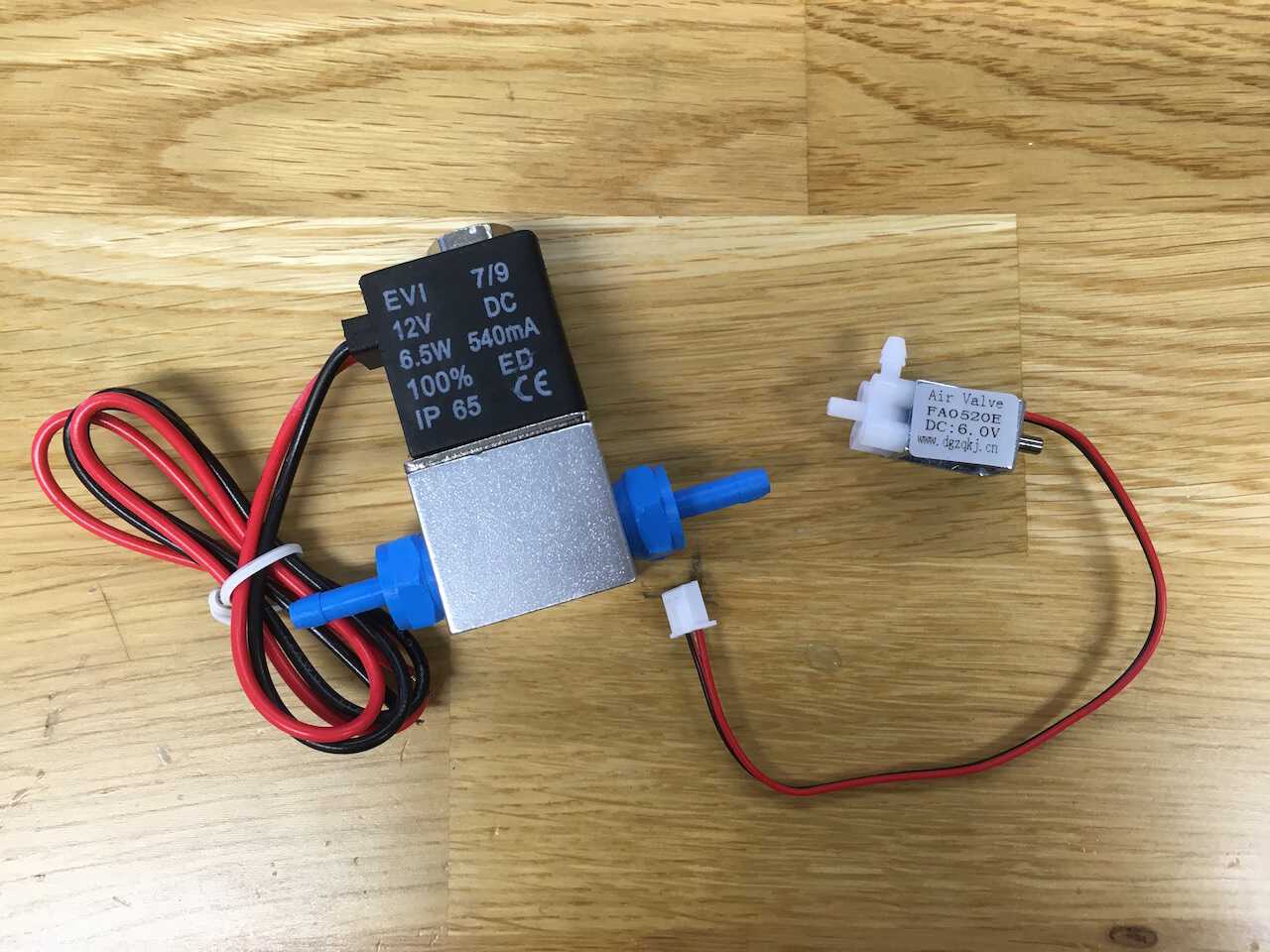
The left one is the old valve from Amazon; the right one is a new valve from Adafruit
Name Voltage Current Power Comsumption Tubes Where to buy Left Solenoid Valve 12V 0.52A 6.24 watts 2 Amazon Right Air Valve 6V 0.3A 1.8 watts 3 Adafruit After installing the new valves, I could optimize the usage of packaging space and reduce the power consumption and current in total. But I had to block one of the connectors on the vacuum bags to ensure they can be inflated without air leaking.
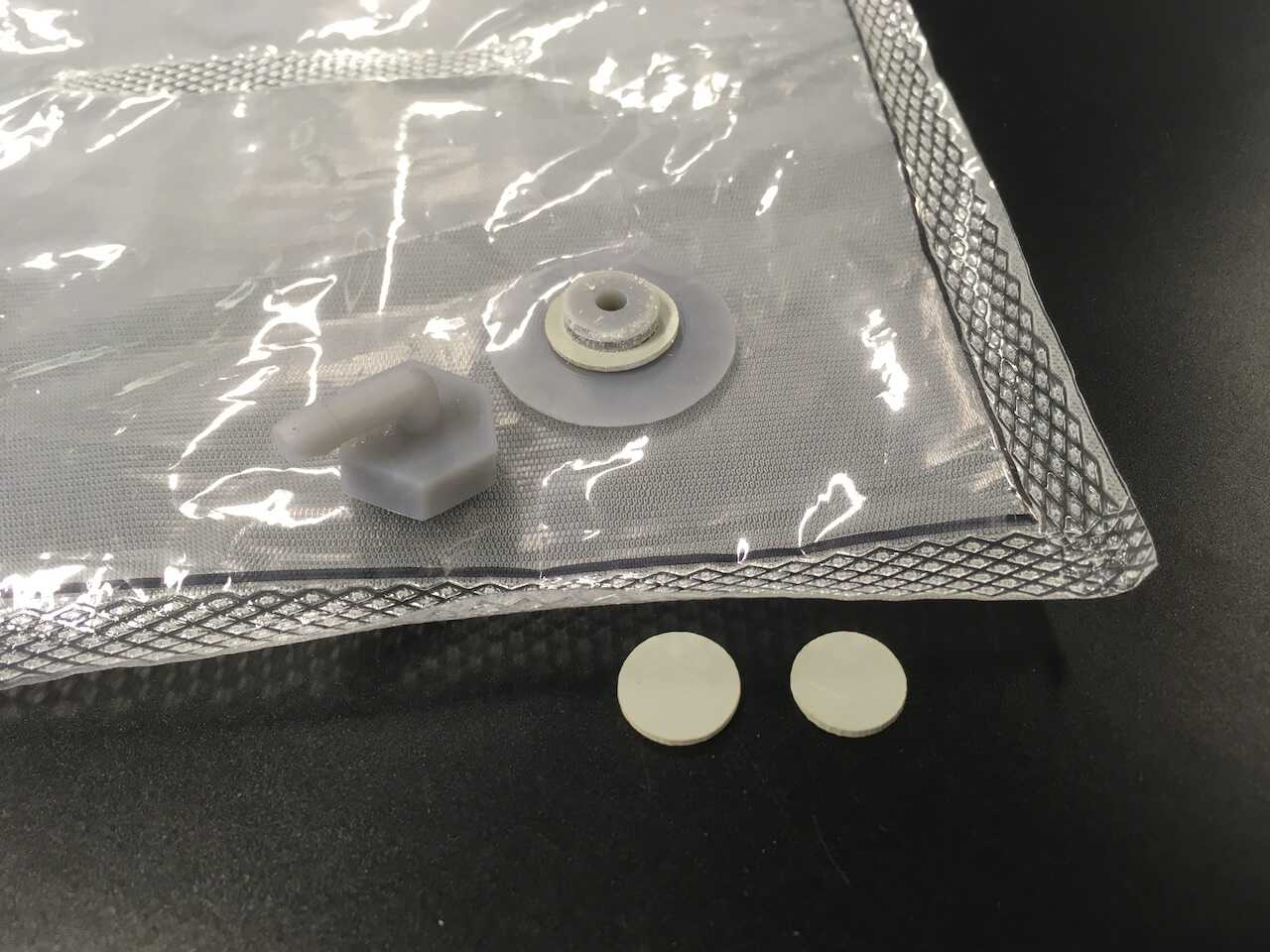
With the leftovers from rubber washers, it could block the connectors perfectly.
-
Multiple Step Response sensors would affect each other
!! Solution: In the end, I only used two sensors to represent the front and back valves to minimize the noise that might happen during the hugging. The improvement that could be made in the future is to shorten the cables from sensors to PCBs, in other words, give each sensor a microcontroller. Only use the digital signals to travel around the clothes to avoid the noise and achieve communication between the boards.
?? Reason: Because of the characteristics of the step response, I found that not only the copper sheets but also the cables themselves are part of the sensors, which means not only when I touched but also when my hand hovered over the cable the sensor would react.
-
Wrong direction of Diode Schottky
?? Reason: Because of the wrong direction of the kickback diodes, the power-on LEDs couldn’t be lighted correctly.
!! Solution: Change the direction of it: the cathode of diodes should be connected to the positive side of the voltage source (VCC).
-
The code couldn’t be uploaded to ESP-WROOM-02D
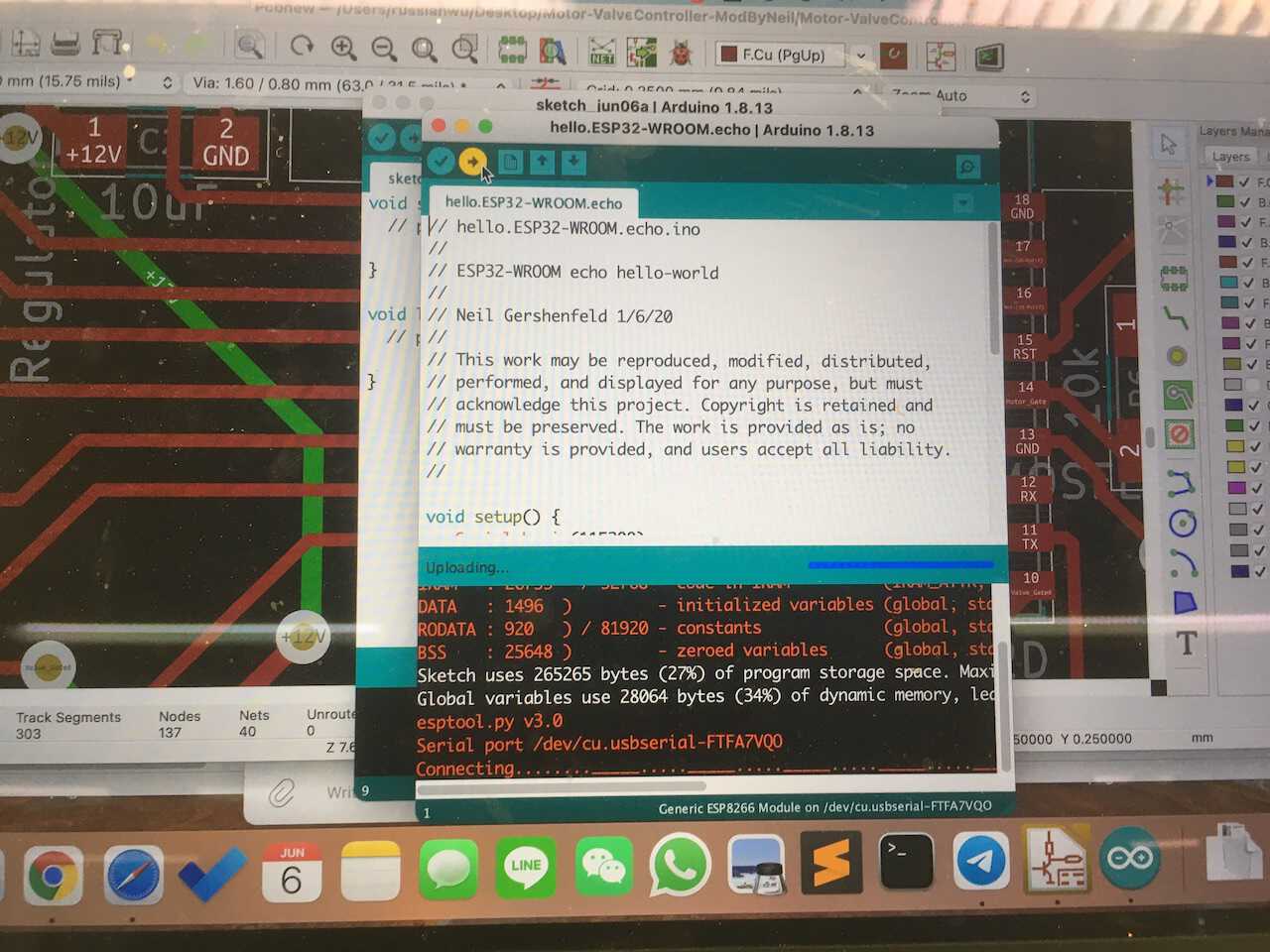 The uploading status was stuck at Connecting forever...
The uploading status was stuck at Connecting forever...
 Debugging with connecting IO15 to GND
Debugging with connecting IO15 to GND
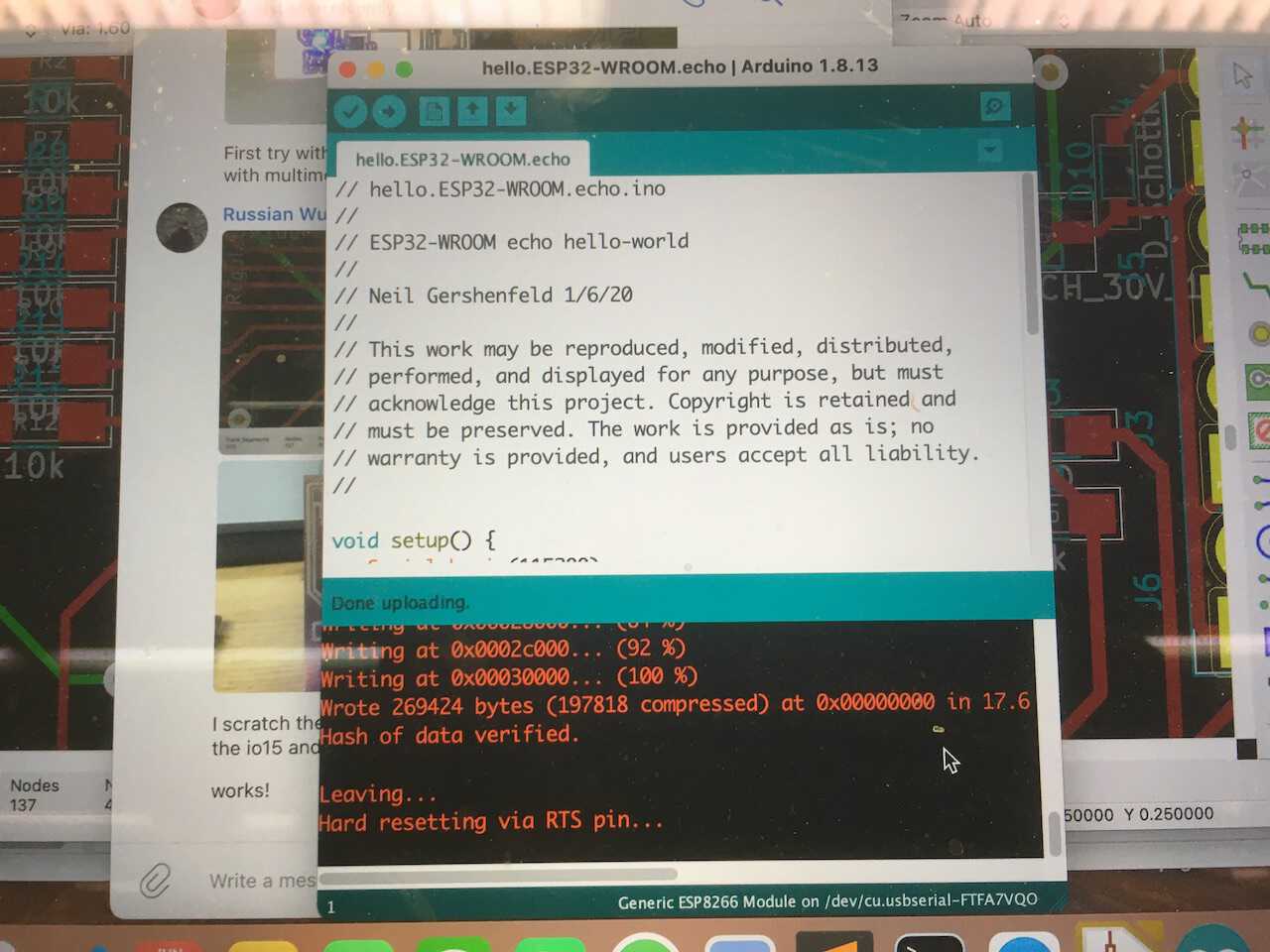 Finally, I am able to upload the program
Finally, I am able to upload the program
?? Reason and !! Solution: I was struggling with this part for a whole week. Finally, with help from Matti, I learned that the importance of adding a pull-down resistor, which could pull down (set to ground) the IO15 while it was flashing.
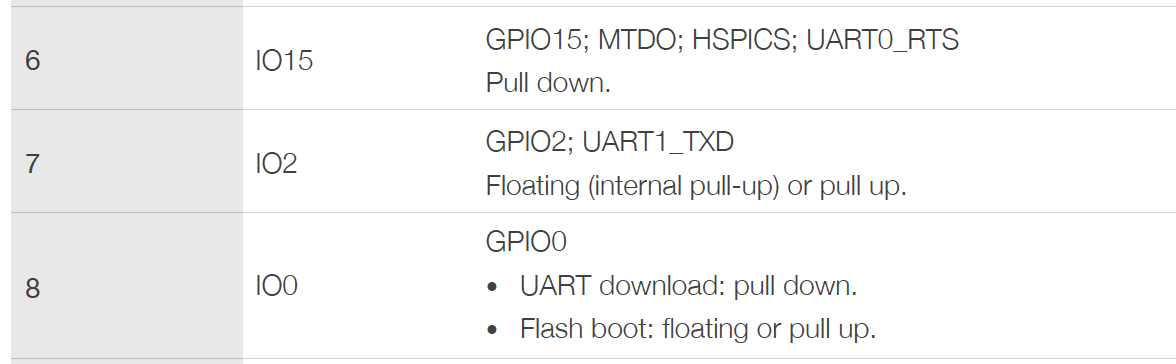
To cut a long story short, I used IO15 as one of the digital outputs to N-Mosfet to control the on and off of a valve. However, according to default, it has to be either connected to the ground or a pull-down resistor while flashing. In my case, I connected IO15 to a Mosfet. The pin is unconnected from either a defined HIGH or LOW condition, it has the potential to “float” between 0V and +5V (Vcc) allowing the pin to self–bias at any voltage level whether that represents a HIGH or a LOW condition.
 Fix with pull-down resistors (12kΩ), which should be higher than 10 kΩ
Fix with pull-down resistors (12kΩ), which should be higher than 10 kΩ
The mainboard works! -
The airflow volume of one of DP0125 or DP0140 was too low; therefore it took approximately 30 seconds to pump all the bags up
!! Solution: Parallelize the pumps. I found a tutorial on YouTube that introduced me how to parallelize the pumps. It works quite similarly to parallelizing the current in electronics.
Download
The Final Project zip file 1 and Final Project zip file 2 includes:
- Hidden Pockets' Patterns
- 3D printed connectors for valves
- 3D printed connectors for vacuum bags (male and female)
- Mounting Station for Pumps, Valves, and PCB
- Step Response sensor mold
- Code and Schematic of Main Board (Wifi Access Point)
- Code and Schematic of Secondary Board (HTTP Client and Analog Reader)

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.