Trying to adjust thinking process to prepare molds for casting.
Base experiments
Specification
One-Sided Mold
Multi-Sided Mold
Soft mold
I remembered this curious project Precise Imprecision: Flexible Construction with Robotics by Ester Hong-Fen Lo, Leon Yi-Liang Ko at Univeristy Of Michigan - in ACADIA 2019 - a conference on use of technologies in architecture, that I participated in.
The project investigated the idea of using soft fabric molds that would be filled up with in that case concrete - and exploring formfinding with this semi-fluid, semi-planned form-factor for construction.
So I went ahead and established a small simulation taking a 2D pattern of blocks before fill-up and calculating the final shape.
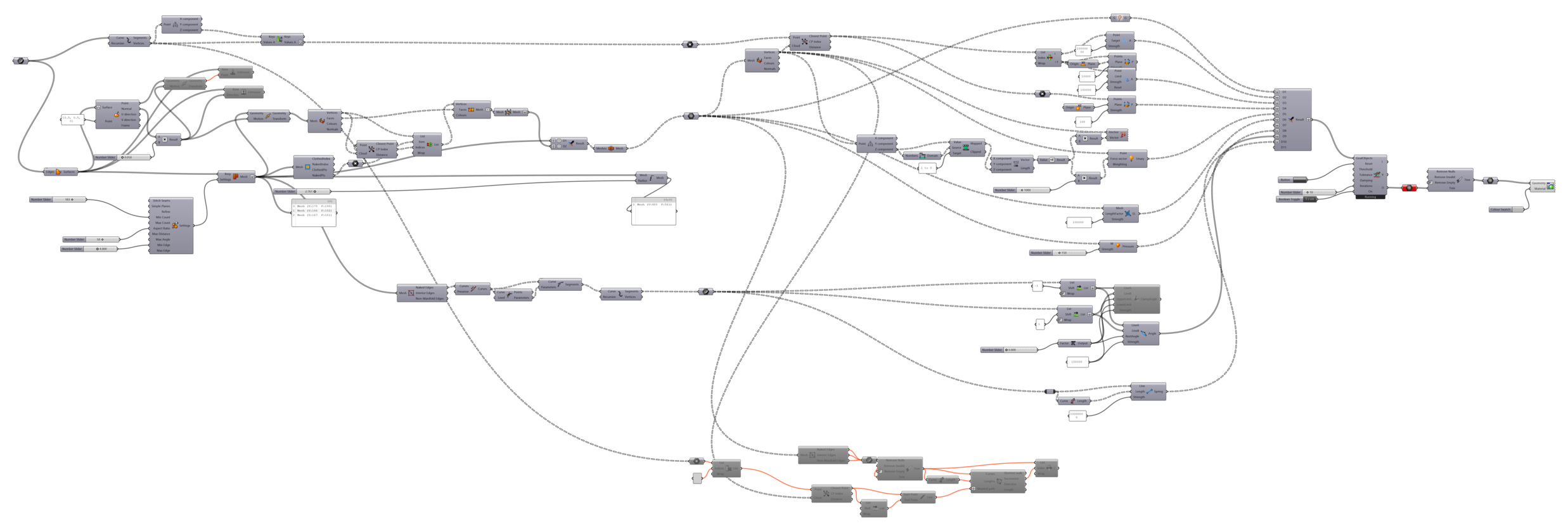 – Simulation Layout in GH –
– Simulation Layout in GH –
So the input would be like this:
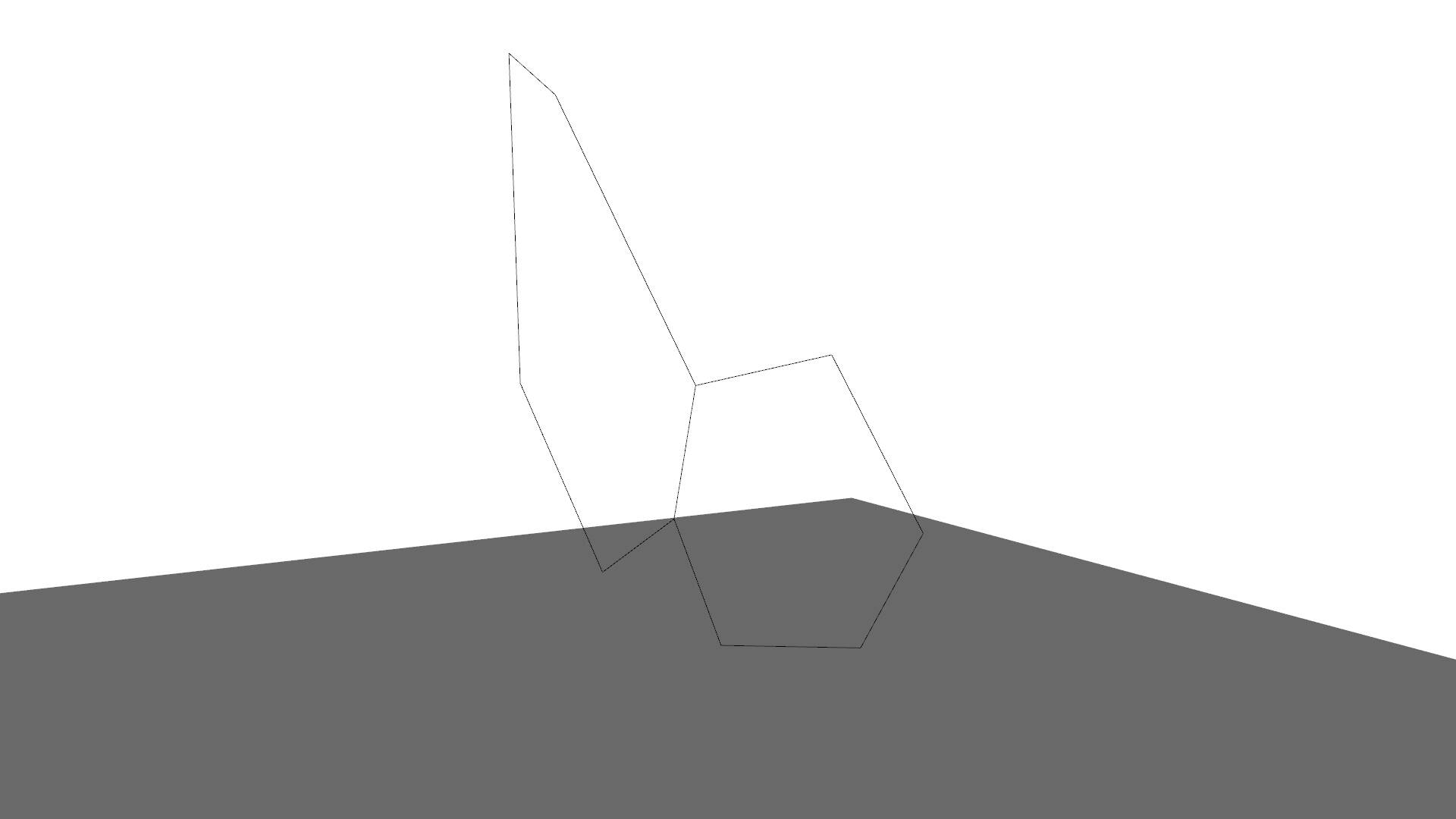 – Input –
– Input –
And this would serve as well for the outline for the soft “mold”
And it would be the outcome:
.jpg) – Simulation Outcome –
– Simulation Outcome –
.jpg) – Simulation Outcome –
– Simulation Outcome –
Obviously this is just a beginning. I st3ill need to expand on the initial shape forming - to be able to fill it up. Additionally, I am curious to try to go in a reverse logic - starting from target outline and developing the initial molds to get to this target shape. Moreover, the simulation is lacking realism in the behavior of filling. Moreover shapes would behave in this way if made all together on one wheet, but the behavior is more insividual if split up. But this is a curious experiment for me to see how much does the outcome in phiysical experiment would differ from the simulation.
Files: