Week 17: Mechanical design and Machine design
Mechanical design group assignment:
- design a machine that includes mechanism+actuation+automation
- build the mechanical parts and operate it manually
- document the group project and your individual contribution
Machine design group assignment:
- actuate and automate your machine
- document the group project and your individual contribution
Group assignment
Working with Achille, Hannu, and Jari in the group assignments this week.
Our group site is in Fab Lab Oulu's site. We are going to make a robotic arm. After splitting tasks I started to look information about servo motors. We have 3x HKSCM16-6 Single Chip Digital Servo and 1x Turnigy TG9z servo motors to work with.
Programming
I have not used any kind of motors before. First I wanted to check that all of the motors are working. For this I looked through how to connect it to a arduino UNO and also some example code for it.
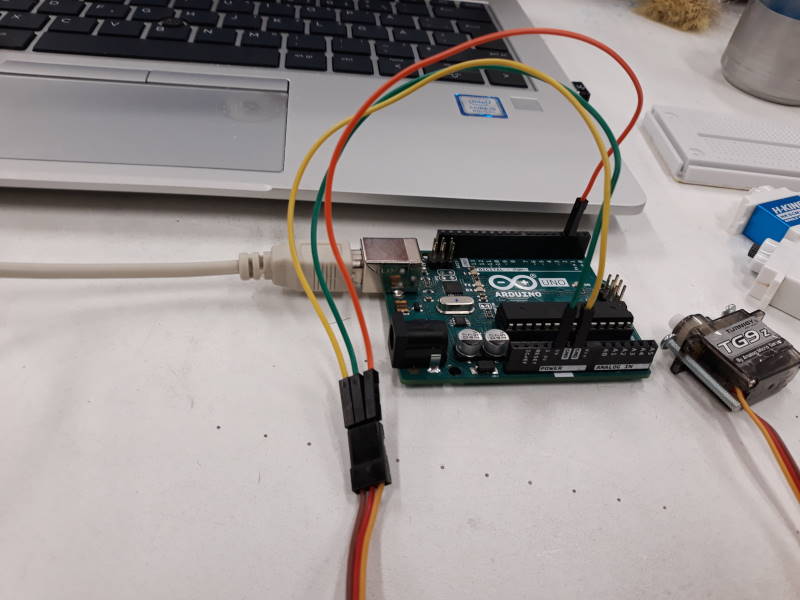
Arduino Servo Library has good overall data about programming servo motors, but also wiring. Servo motor has 3 pins, GND, VCC and signal. VCC is usually red. Black or brown is GND. Last, which is in this case yellow, is the signal. It is also noted that when using more than 1 or 2 servo motors, you should consider another power source.
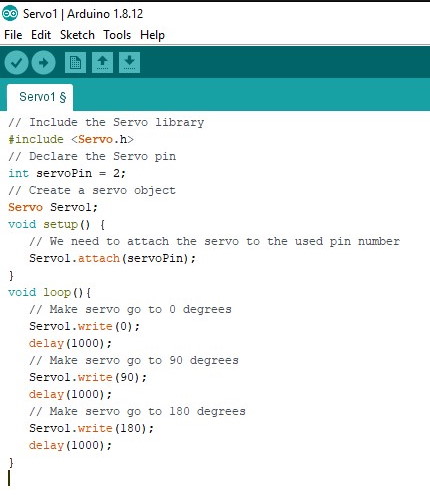
To test them I found Arduino Servo Motors code sample from Instructables.
Warning: following video contains audio!
Short sample of code in action. All of the motors are working fine.
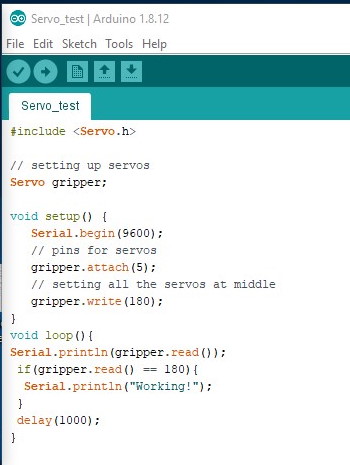

Quickly checked how servo.read() works. Seems like with this it is possible to an if-sentence by the position in case it will be required.

Here is the basic code to set up servo motors and moving them to a default spot when power is connected to the machine. Judging by fast tests, the values have to be quite small especially on the lowerArn.