Networking & Communications
This week we working on the communications between different node on a project, it's perfect i have multiple nodes on mine.
The ESP board :
The hearts of this project is a ESP8266 board, this board going on a API to take the weather information & after transmit this informations on the different module.
She also received information from a Temperature & humidity sensor board for the room information.
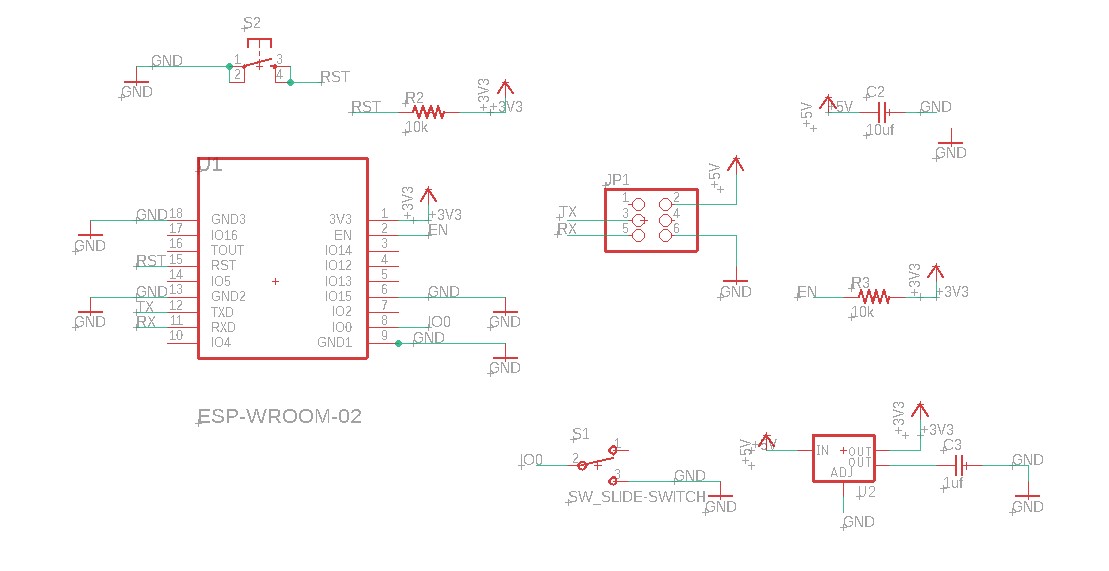
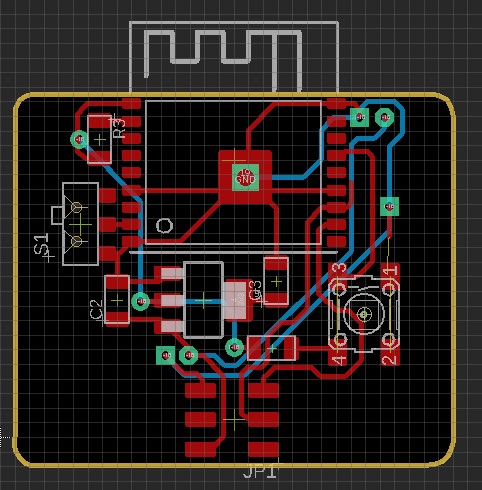
For Send the information to the other nodes i use a a synchronous Serial bus based on a RS-232 protocole.
This part use the Wifi communication to get all the weather data and use the ArduinoJson librarie for translate it for the arduino (here i use the V5)
void getWeatherData() //client function to send/receive GET request data.
{
if (client.connect(servername, 80))
{ //starts client connection, checks for connection
client.println("GET /data/2.5/weather?zip="+Zip+","+Country+"&units=metric&appid="+APIKEY);
client.println("Host: api.openweathermap.org");
client.println("User-Agent: ArduinoWiFi/1.1");
client.println("Connection: close");
client.println();
}
else {
Serial.println("connection failed"); //error message if no client connect
Serial.println();
}
while(client.connected() && !client.available())
delay(1); //waits for data
while (client.connected() || client.available())
{ //connected or data available
char c = client.read(); //gets byte from ethernet buffer
result = result+c;
}
client.stop(); //stop client
result.replace('[', ' ');
result.replace(']', ' ');
Serial.println(result);
char jsonArray [result.length()+1];
result.toCharArray(jsonArray,sizeof(jsonArray));
jsonArray[result.length() + 1] = '\0';
StaticJsonBuffer<1024> json_buf;
JsonObject &root = json_buf.parseObject(jsonArray);
if (!root.success())
{
Serial.println("parseObject() failed");
}
int id = root["weather"]["id"];
const char* description = root["weather"]["description"];
float main_temp = root["main"]["temp"];
int main_humidity = root["main"]["humidity"];
int clouds_all = root["clouds"]["all"];
long dt = root["dt"];
long sys_sunrise = root["sys"]["sunrise"];
long sys_sunset = root["sys"]["sunset"];
const char* cityName = root["name"];
Here is the part of the code i use to create a information Buffer & sending it on the Serial Bus.
void sendStepper( int message1 , int message2 , int message3 , int message4 , int message5 ){
sendBuffer[0] = 'b'; // Byte that begin the communication
sendBuffer[1] = highByte( message1 );
sendBuffer[2] = lowByte( message1 );
sendBuffer[3] = highByte( message2 );
sendBuffer[4] = lowByte( message2 );
sendBuffer[5] = message3;
sendBuffer[6] = message4;
sendBuffer[7] = message5;
sendBuffer[8] = '\n'; // Byte that end the communication
for (int i = 0; i <= 8; i++)
{
Serial.write(sendBuffer[i]);
}
}
here you could show the FULL CODE
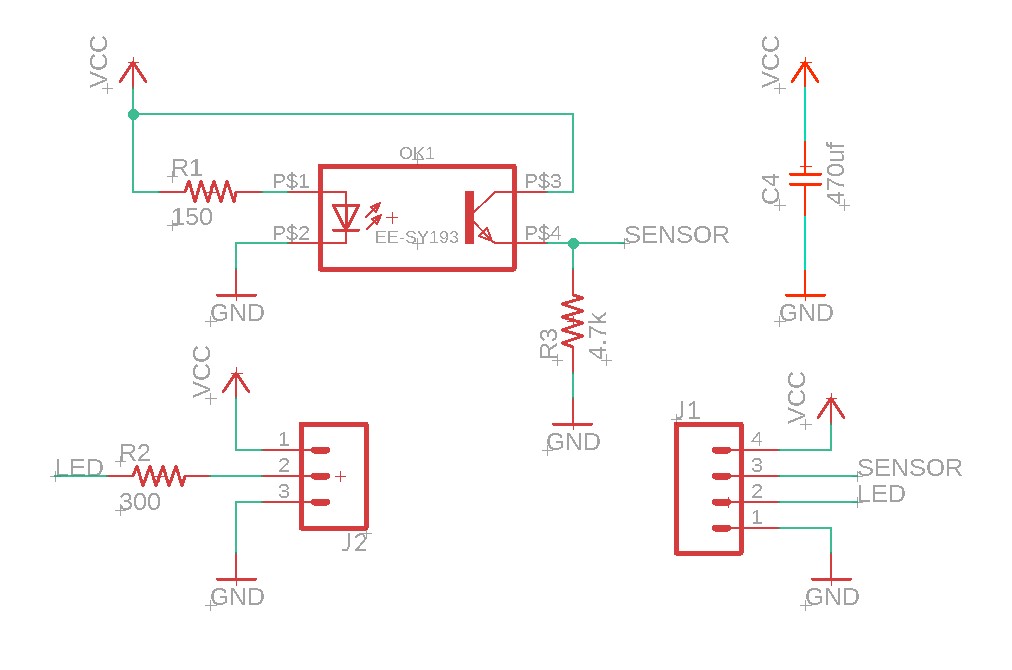
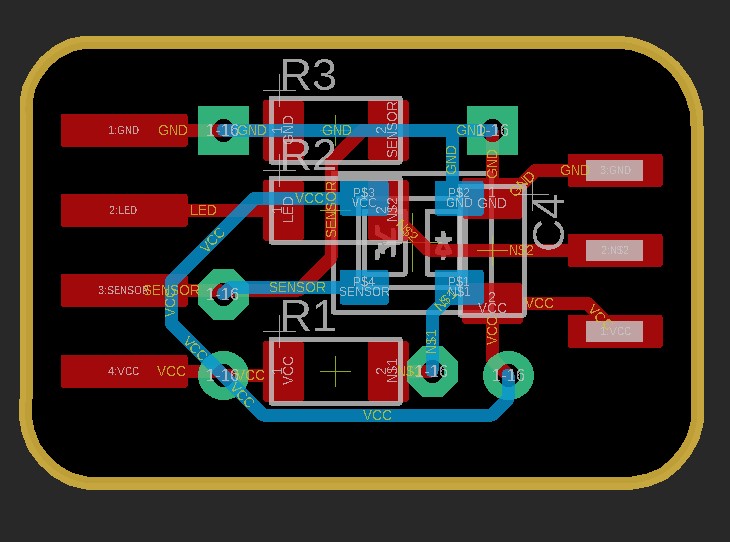
The Stepper Node:
One of the node is made to move one of the dispaly gear with a stepper and control the LED (on the final project i put one of this module for each of the 3 gears for my full display.)
For this module i use a ATTiny 1614 for control it.
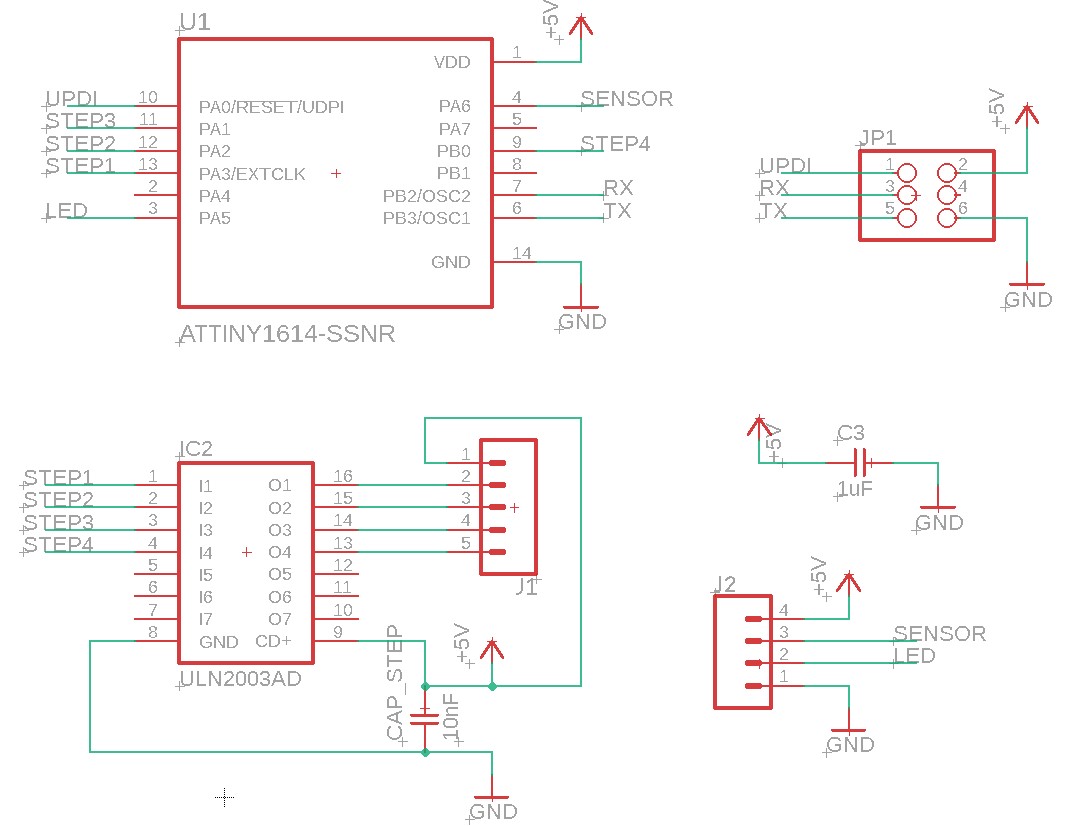
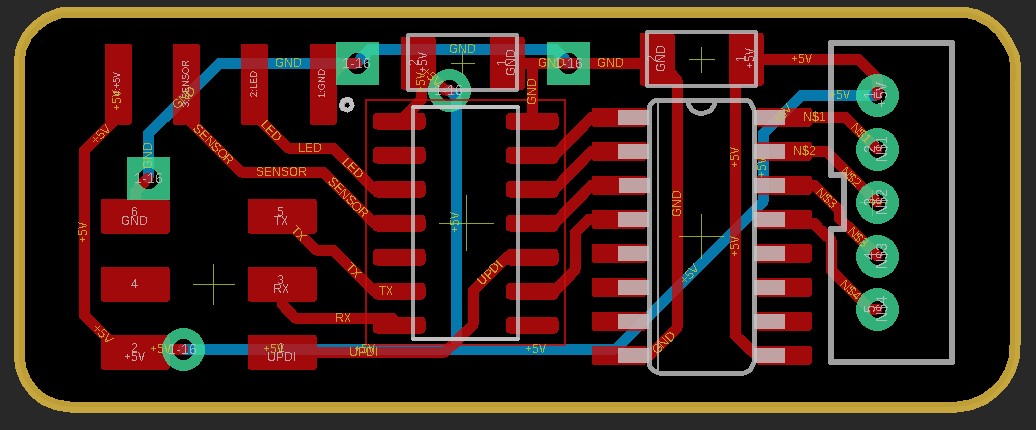
I connect on this board a small sensor part and the LED Strip
Here is the part of the Stepper modules code i use to received the data send by the ESP:
void readSerial()
{
if (Serial.available() > 0)
{
Serial.readBytesUntil('\n',messageR,9);
if ( messageR[0] == byte('a'))
{
weatherID = messageR[1] << 8 + messageR[2];
DayOrNight = messageR[3];
}
}
}
here you could find the Full code of the first stepper module.
The sensor board:
This board use a Si7020 Sensor.
This Temperature & humidity sensor communicate with the ATtiny1614 on the board with a I2C communication protocole.
The Board :
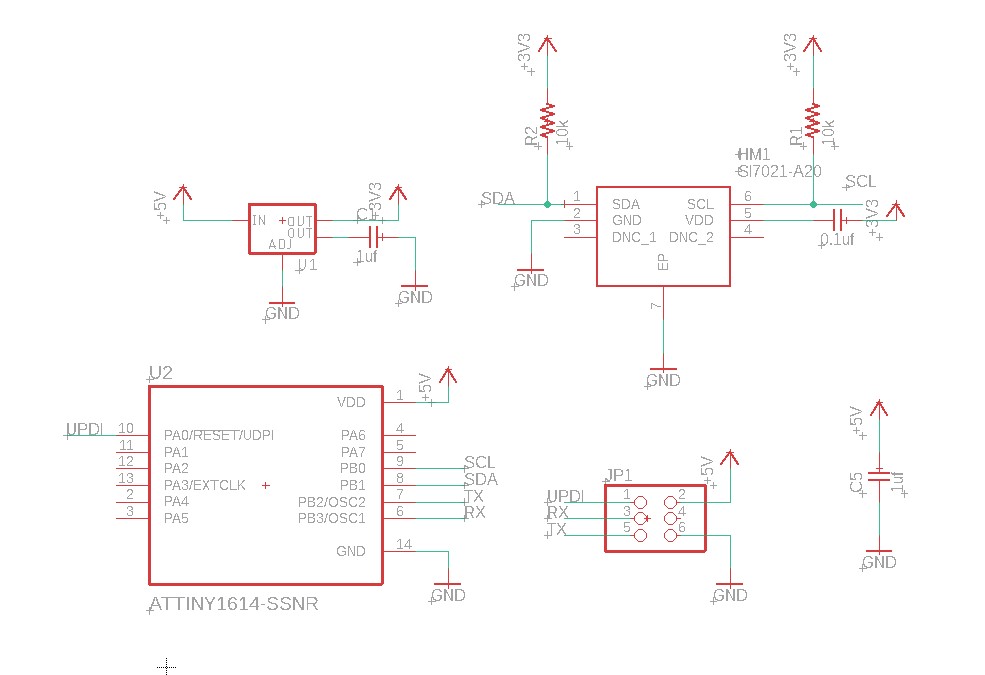
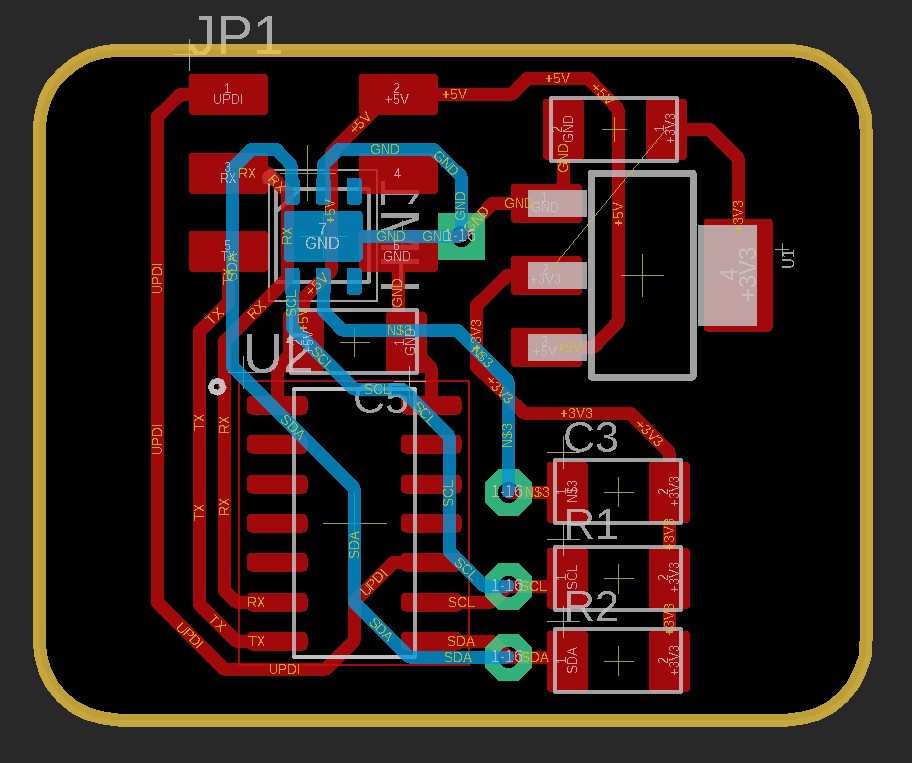
I decide to put the sensor on the bottom of the board for a better integration on my futur project.
The I2C communication:
According with the Data-sheet of the sensor here is the code i use to get the information:
void SensorRead()
{
unsigned int data[2];
// Start I2C transmission
Wire.beginTransmission(Addr);
// Send Humidity measurement command, NO HOLD MASTER
Wire.write(0xF5);
// Stop I2C transmission
Wire.endTransmission();
delay(500);
// Request 2 bytes of data
Wire.requestFrom(Addr, 2);
// Read 2 bytes of data
// Humidity msb, Humidity lsb
if(Wire.available() == 2)
{
data[0] = Wire.read();
data[1] = Wire.read();
}
// Convert the data
Humidity = ((data[0] * 256.0) + data[1]);
Humidity = ((125 * Humidity) / 65536.0) - 6;
// Start I2C transmission
Wire.beginTransmission(Addr);
// Send temperature measurement command, NO HOLD MASTER
Wire.write(0xF3);
// Stop I2C transmission
Wire.endTransmission();
delay(500);
// Request 2 bytes of data
Wire.requestFrom(Addr, 2);
// Read 2 bytes of data
// temp msb, temp lsb
if(Wire.available() == 2)
{
data[0] = Wire.read();
data[1] = Wire.read();
}
// Convert the data
temp = ((data[0] * 256.0) + data[1]);
ctemp = ((175.72 * temp) / 65536.0) - 46.85; // convert temp data in a celsius temp.
Temp = round( ctemp *100 );
delay(1000);
}
Here you could find the Full Code with the communication with the ESP board
Ok for the theorical parts......
But after the Shut down of the lab, i could now have access again to the Fablab, but with only a month to put into the reality everything i theorize and design at home.
Let's start the sprint times......
With the time i have to make my final project & the different missing assignement i design, i have to make some choice. After i fabricate a first prototype of my boards and programming it i encounter a big difficulty, they don't want to communicate each other like i want. I try to debug it and the first problem is : Separatly each board work well but when i try to received information from the Esp board on the ATtiny one the information received was totaly no readable....
After a lot a debugging, reflexions i decide to simplify the communication between boards.
Now on the projectt i have only one way communication with a single charachter to transmit, all the interpretations and the screen programation would be on the Esp directly.
void SendtoMecha()
{
Serial.write(getMechaId(current->id, true));
}
char getMechaId(uint16_t id, bool today)
{
if ( today && id/100 == 8 && (current->dt < current->sunrise || current->dt > current->sunset)) id += 1000;
if ( today && id/100 == 5 && (current->dt < current->sunrise || current->dt > current->sunset)) id += 1000;
if ( today && id/100 == 6 && (current->dt < current->sunrise || current->dt > current->sunset)) id += 1000;
if (id/100 == 2) return 'a';
if (id/100 == 3) return 'b';
if (id == 500) return 'c';
if (id == 501) return 'c';
if (id == 502) return 'c';
if (id == 503) return 'c';
if (id == 504) return 'c';
if (id == 511) return 'd';
else if (id/100 == 5) return 'e';
if (id == 600) return 'f';
if (id >= 611 && id <= 616) return 'd';
else if (id/100 == 6) return 'g';
if (id/100 == 7) return 'h';
if (id == 800) return 'i';
if (id == 801) return 'j';
if (id == 802) return 'k';
if (id == 803) return 'l';
if (id == 804) return 'l';
if (id == 1800) return 'm';
if (id == 1801) return 'n';
if (id == 1802) return 'k';
if (id == 1803) return 'l';
if (id == 1804) return 'l';
if (id == 1500) return 'o';
if (id == 1501) return 'o';
if (id == 1502) return 'o';
if (id == 1503) return 'o';
if (id == 1504) return 'o';
if (id == 1511) return 'd';
if (id == 1600) return 'p';
if (id >= 1611 && id <= 1616) return 'd';
else if (id/100 == 16) return 'g';
}
Finaly after some long crisis debugging. I finally find the problem. For make my LED array working with the classic adafruit library i have to clocked my Attiny1614 to 16mhz, but i find a library make specially by space & konde to program neo pixel with a 20mhz clock.
I do the change with this new one (easy opperations, he make this tinyNeopixel library looking same as the adafruit one ^^).
Now Boards communicate and make what i want they do....
You could find more informations (codes & files) on the development of the communication & of each boards on my final project diary here