Assignment:
Propose a final project masterpiece that integrates the range of units covered
What will it do?
For Final project, I want to make Mobile robot with robotic arm. Robot will be with Omni wheels so it can go in any direction. It will have camera at front which can rotates around and send the visuals. 3DOF (degree of freedom) robotic arm will be placed on top of mobile robot. End factor will be suction cup connected with pump and pneumatic value to control its suction (when to create suction and when to leave). These all will be controlled by using mobile app via Bluetooth.
Who's done what beforehand?
Idea is not new as many companies are making these types of robots for industries to replace the human labor. Out of which KUKA robotics is one best company which is working on robotics and providing the solution. These are very advanced high end systems and also costmore.
KUKA Mobile robot

eing robotics engineer, I always want low cost robotic solutions. So this inspires me to finalize this project.
What will you design?
I am trying to make complete system by my own. I am going to design the Omni wheel, chase, Robotic arm, microcontroller based circuit and Android app to control. For robotic arm I have two ideas. First one is Laser cut and second one is 3D print. As I am going to make robotic arm in a little bit big size, so I prefer the first idea of laser cutting on acrylic.
What materials and components will be used?
- 6mm Transparent/colored Acrylic sheet(2x2-fts)
- 3mm Transparent/colored Acrylic sheet(1X2-fts)
- PLA for 3D printing
- 32U4 based Microcontroller board
- DC motors/Servo motors with continious mode-5
- Smart Servo motors-I perfer (Dynamixel AX-12A)-4
- The ESP32-CAM-1
- HC-05 bluethooth-1
- female to female and male to female wires
- Lipo Battery
- DC pump for suction
Where will come from?
he most of Electronics components (Acrylic and pla) will be borrowed from lab. Following are items which I will buy from outside sources
- Smart Servo motors-I perfer (Dynamixel AX-12A) Robotis.us
- The ESP32-CAM hallroad.org
- Lipo Battery hallroad.org
How much will they cost?
Bill of Material
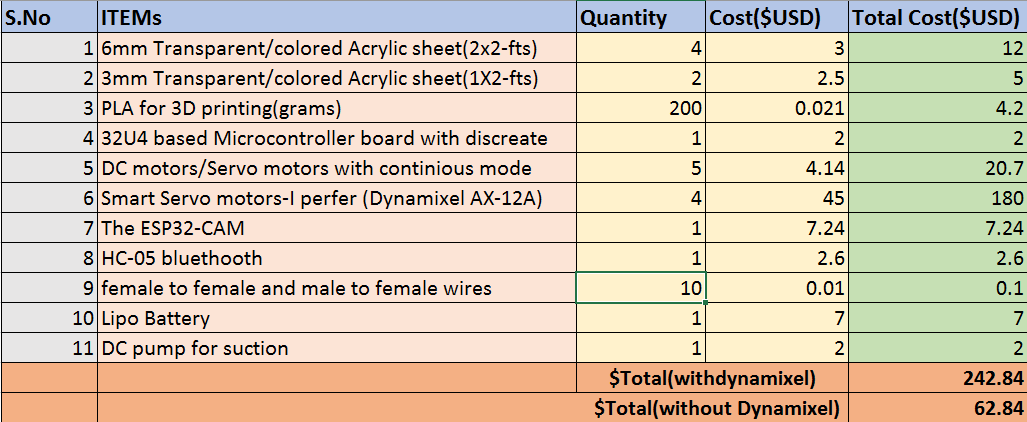
Note: No. 6 is Dynamixel Servo motor. We can replace dynamixel with any servo motor then cost will be different as mentioned in total(without dynamixel)
What parts and systems will be made?
- Press-fit base of mobile Robot
- Robotic arm 3DOF
- 3D printed omni wheel
- 3D printed Camera holder connected to servo to rotate
- Main PCB board of Atmega 32U4 with HC-05
- PCB of motor driver in case of DC motors
- PCB for ESP32-CAM
- Networking of Mobile app with microncontroller
- Networking of ESP 32-cam with pc/mobile
What processes will be used?
- 2D designing and laser cuting: Press-fit base of mobile Robot and Robotic arm 3DOF
- 3D designing and Printing: 3D desinging and printing of omni wheel and Camera holder
- Electronics desinging: Designing of PCB board of Atmega 32U4 with HC-05, pcb for motor driver and PCB for ESP32-CAM
- Electronics Production:generating .rml files from mods, milling using SRM-20 and soldering components.
- Microcontroller programming: Programming will be done in main 32u4 based board. All the motors of moble robot, robotic arm and servo for camera will be interfaced with main board and controlled.
- Interface and Application: Andriod app will be developed to control the mobile robot, robotic arm and angle of camera using bluetooth
- Networking:HC-05 will used to make interface between mobile app and microcontroller via bluetooth and Wifi will be used to transmit the video from ESP32 cam to pc/mobile
What questions need to be answered?
- Is system integrated and work properly as required
- Is robotic arm working correctly? what is accuracy of robotic arm?
- Are all the components easily controlled from mobile app?
- Is app user friendly?
How will it be evaluated?
- Demo video
- Mobile robot should move at least forward-backward controlled via mobile app
- Atleast two 2DOF of robotic arm work properly
- All parts should be cut, made and assembled properly
- Camera and suction cup are optional
