Motivation
I am an Electrical Engineer. My majors are in Electronics. From vey beginning of my undergrad studies, I am attracted towards robotics. I have attended different workshops on robotics and participated in different competitions. My final year project was design and implementation of flight controller for quadcopters. In which I designed and manufactured the prototype of flight controller for quadcopters. Currently, I am working on manipulator design and the study of kinematics and dynamics of manipulators.There are so many companies working on robotics, out of which KUKA robotics is my favorite. They produce high quality manipulators and mobile robots. But they all are very expensive.
My idea for final project is to make low cost mobile robot having 3 DOF robotic arms. Robot will have Omni wheels so it can move in any direction. It will have camera at front which can rotates around and send the video to user. 3DOF (degree of freedom) robotic arm will be placed on top of mobile robot. It will have suction cup as end factor, connected with pump and pneumatic value to control its suction (when to create suction and when to leave). These all will be controlled using mobile app via Bluetooth.
Machnical Structure

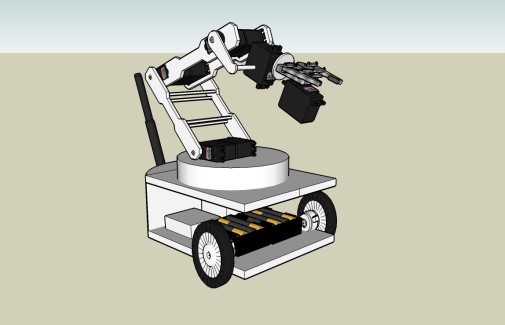
My idea is to make something like this. My robot will have omni wheels, articulated 3DOF robotic arm controlled by mobile app.
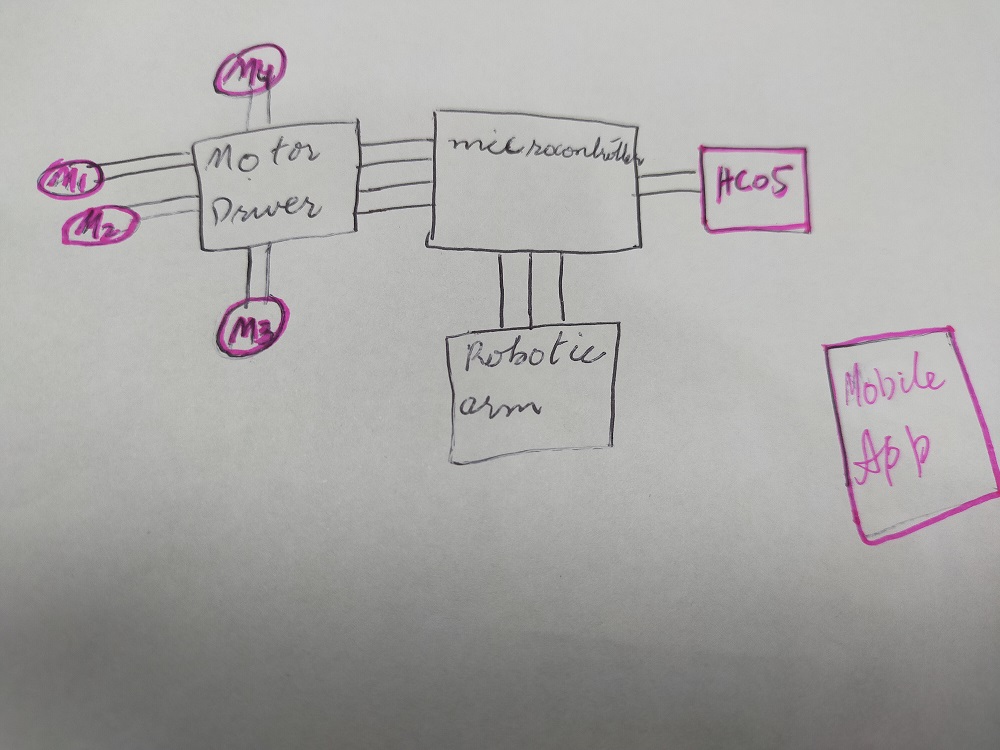
Rough Electrical Diagram
Week wise distribution
- 2D designing and laser cuting: Press-fit base of mobile Robot and Robotic arm 3DOF
- 3D designing and Printing: 3D desinging and printing of omni wheel and Camera holder
- Electronics desinging: Designing of Atmega 32U4 based board with HC-05, pcb for motor driver and PCB for ESP32-CAM
- Electronics Production:Generating .rml files from mods, milling using SRM-20 and soldering components.
- Microcontroller programming: Programming will be done in main 32u4 based board. All the motors of moble robot, robotic arm and servo for camera will be interfaced with main board and controlled via bluetooth.
- Interface and Application: Andriod app will be developed to controll the mobile robot, robotic arm and angle of camera.
- Networking:HC-05 will used to make interface between mobile app and microcontroller via bluetooth and Wifi will be used to transmit the video from ESP32 cam to pc/mobile
