# Ideation
To me, the spirit of FabLabs, and maker spaces in general, is to solve personal problems. It's a way for everyone to make the the product that would never exist because it's so specific to their needs.
So with this in mind, I've been racking my brain in search of a good problem to solve that fits at least most of these criteria:
- feasible: I tend to start a lot of projects (FabLab related or otherwise) and not finish them and part of my desire to attend FabAcademy is to try to help with that
- fun: otherwise, what's the point?
- broad enough: the project needs to include some electronics, at least one input and an input, and some of the techniques we'll be learning, like 3D printing, laser cutting, CNC machining, etc.
I found even this short list of constraints surprisingly challenging, to the point that it almost reminds me of the triple constraint model:

In other words, some of these concern are somewhat antithetical: the more the scope of the project expands to include all the techniques covered in the course, the less likely it is to be feasible, for example.
# Idea 1: "Cat-Off"
Meet the components of this problem:
- one loving but obnoxious orange cat
- one brand new and already clawed leather office chair
Said cat was trained not to claw at the couch when he was much younger with the help of a spray bottle. This is generally considered effective with cats if you're diligent because it attaches an immediate negative consequence (being sprayed with water) to a behavior, while also being painless.
The trick is to be consistent and quick; cats have an even shorter working memory than dogs and a consequence that they cannot mentally map to a behavior that just happened will have no effect other than annoying the cat.
Unfortunately, I'm not in or near the office chair enough to be able to react in time to attempts to turn it into an art installation made of shredded leather.
Hence this idea: a portable, battery operated, computer vision powered device that will deter a cat from entering a specific area.
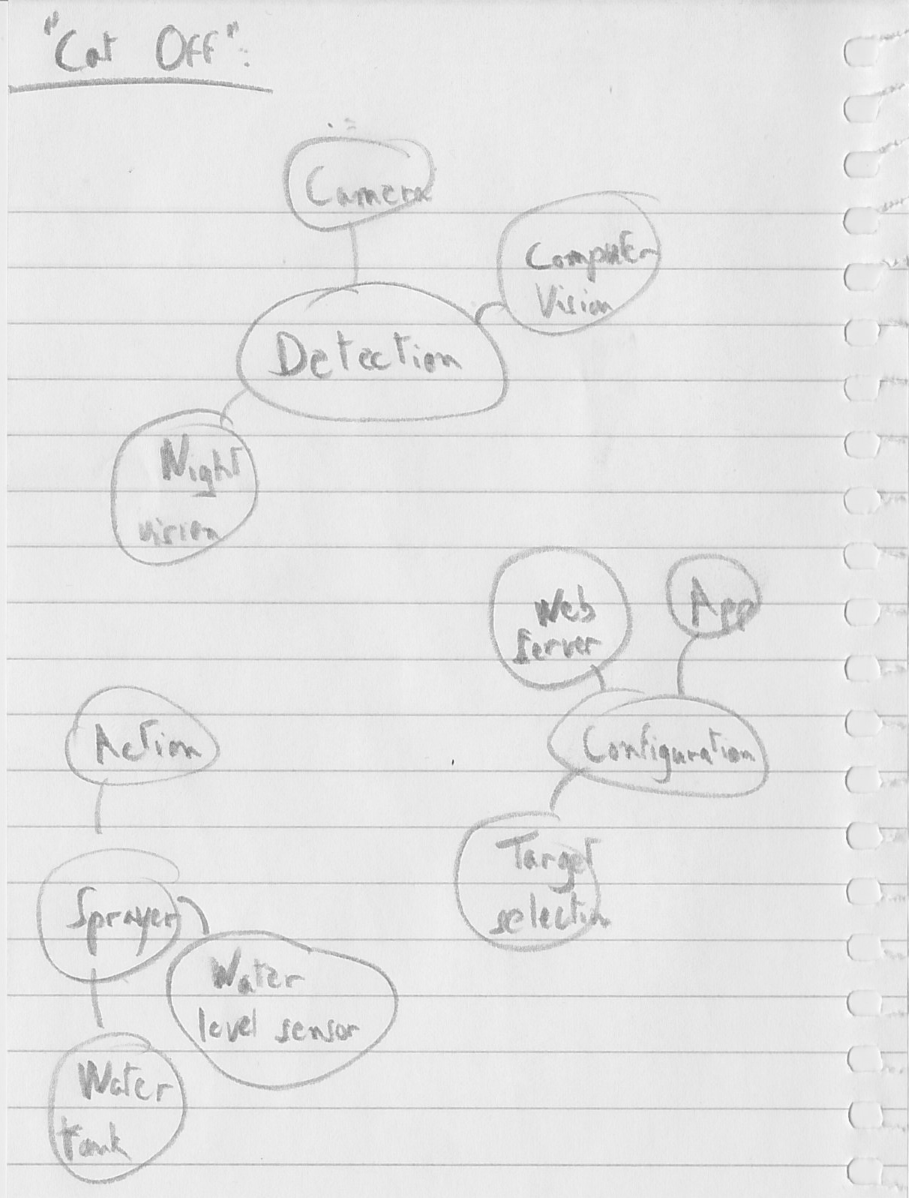
Here's the progress so far on a simple diagram of some of the components and requirements. This is more of a mind map that any formal architecture at this point: some of these are requirements, some of these are functions, some are components in a physical architecture, etc. More details and a cleaner plan next week!
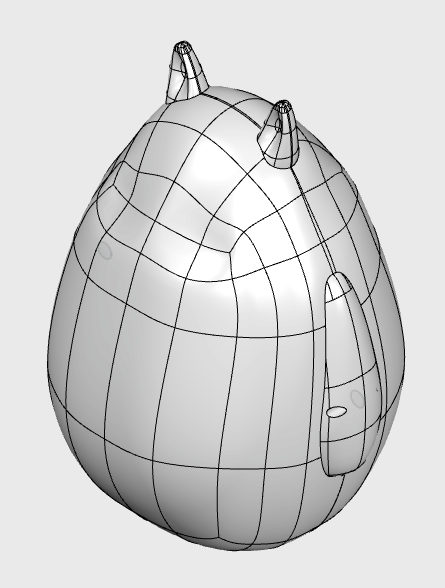
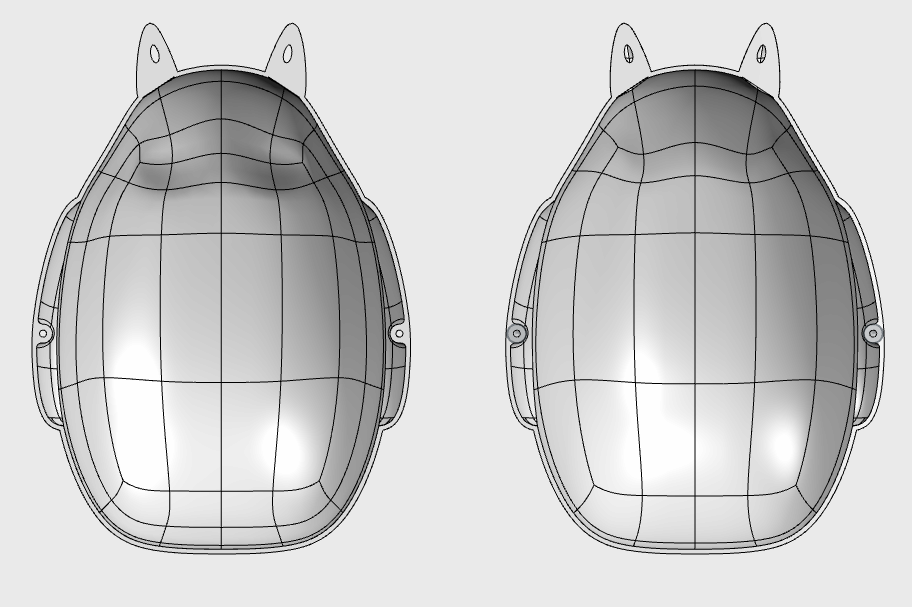
This design will obviously need some sort of packaging, which feels like a good chance for me to move beyond my usual solution (basic laser cut boxes) and attempt to design something more interesting. In week 2, I attempted to begin a more interesting design with subdivision modeling.
# Idea 2: "smart fence"
This is another, perhaps even sillier problem I'd like to solve for myself. I own a pretty basic table saw, one of those plastic job site type saws with the crappy fences that are never true to the table and the blade. A possible solution to this problem (beyond "buy better tools") would be to build a custom fence that is capable of measuring its own distance and alignment to the blade!
Here's a quick and dirty sketch of what that might look like:
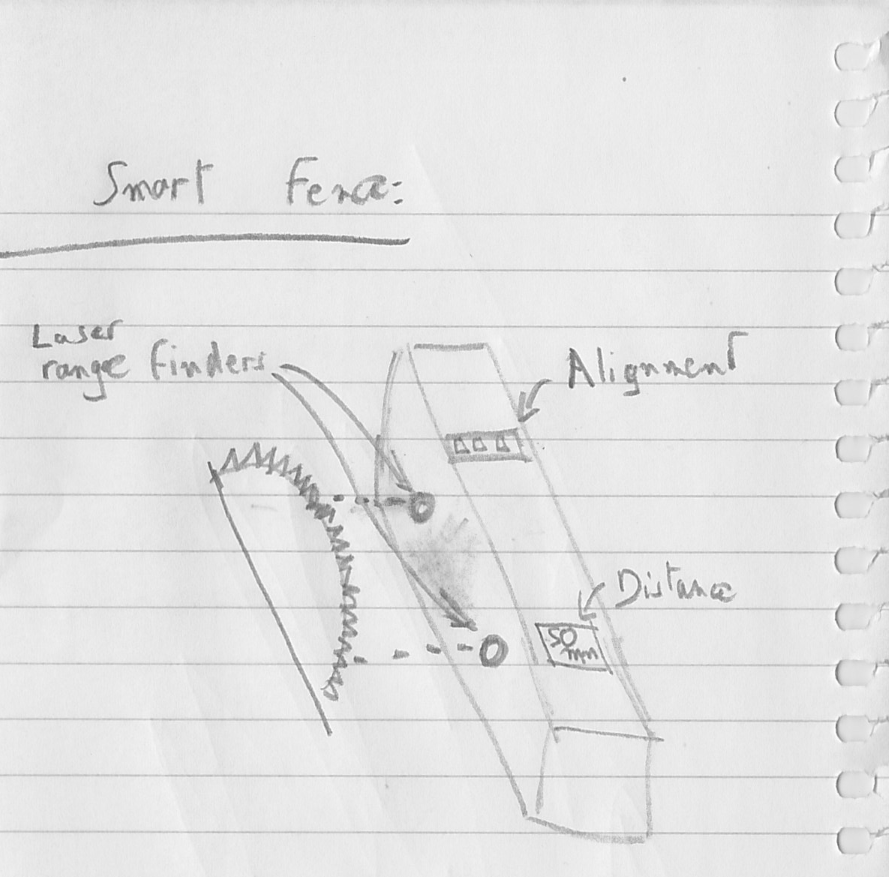
The fence would provide:
- distance to the target (the blade)
- a visual indicator of the parallelism to the target
It seems like this would be achievable by building two distance measurement devices (laser range finders?) in the fence and comparing their results.
At a glance, possible pitfalls here are:
- aligning and calibrating the distance measurement devices perfectly
- designing a fence that is adaptable to various formats of tables
- building this in a cost effective fashion: if this is expensive... why not just buy a decent table saw to start with?
Upon further investigation, it seems like getting a precise enough sensor would be the limiting factor here: the ST Microelectronics VL53L0X seems to be the most popular inexpensive laser-ranging IC available and bills itself as highly accurate. In its "high accuracy" mode, the datasheet lists the accurace as < +- 3%, which sounds reasonable on paper... but here's a quick sketch of what I think the maxium error would look like:
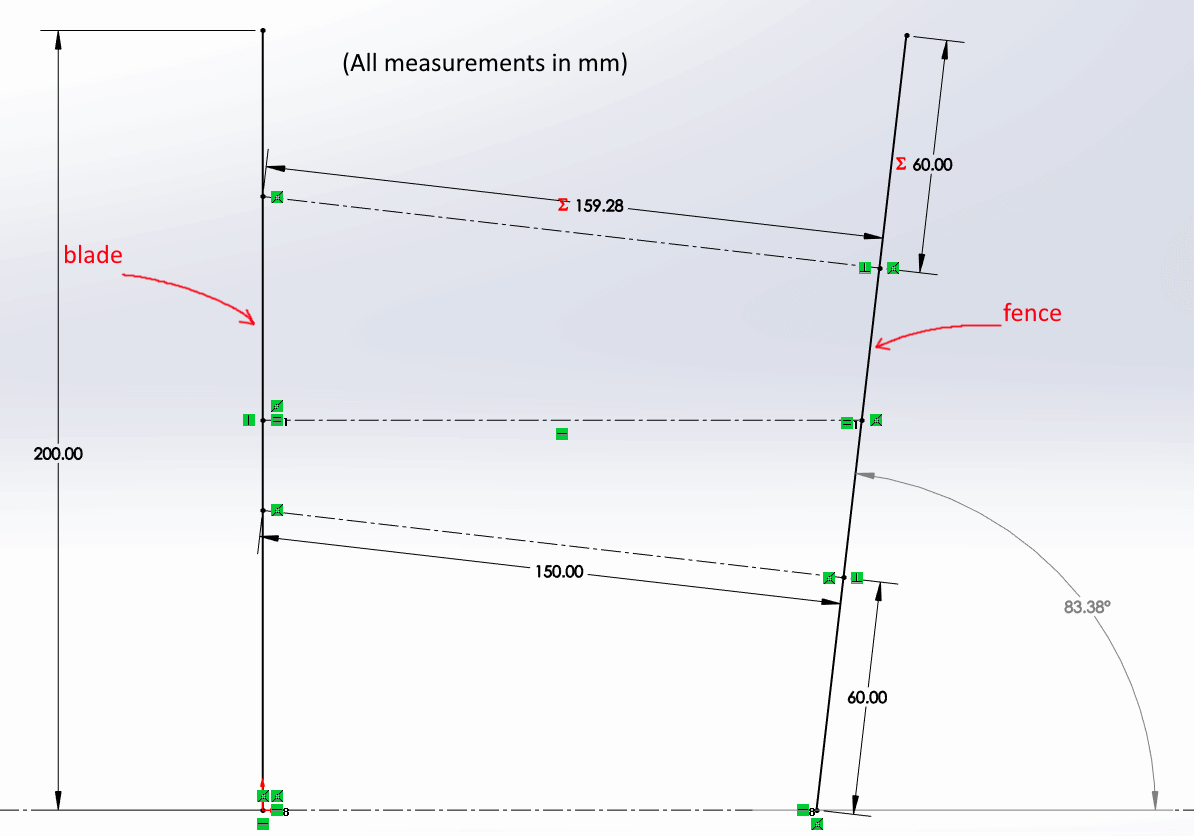
Assuming we're aiming to set our fence parallel to our blade around 15cm, with up to 3% +- deviation on each sensor, it would seem to make sense that both sensors could return 150mm while having a ratio between their real measurements of 1.03 / 0.97, i.e. around 1.062. That is enough of an error to create a very significant deviation from parallel, unfortunately.
For a more practical test of wether or not this has any chance of working, I tried to find existing projects online relying on this IC. This YouTube video makes it pretty clear that the accuracy of the sensor is not going to be sufficient for this application: