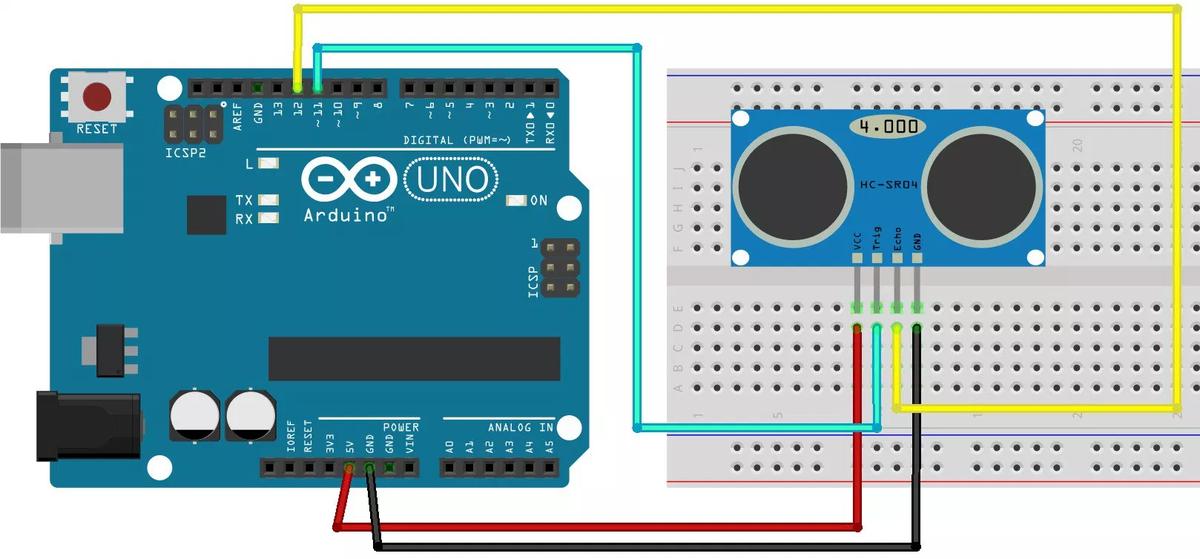
The ultrasonic sensor HC-SR04 provides 2Cm to 400cm of non-contact measurement functionality with a ranging accuracy that can reach up to 3mm. Here is its datasheet. This sensor has 4 pins that we have to connect to our dev board.
- 5V supply
- Trigger Pulse Input
- Echo Pulse Output
- GND
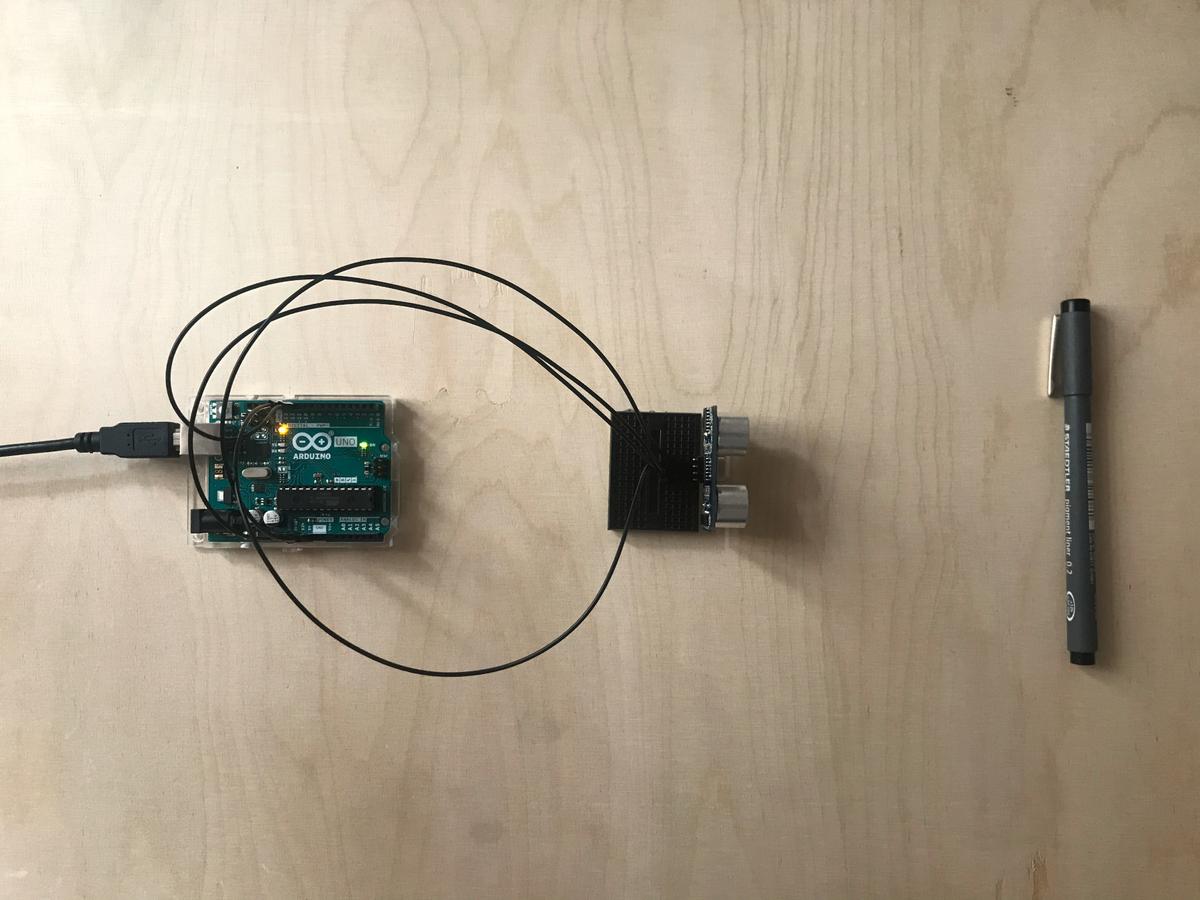
I'm using an Arduino UNO to use this sensor because it needs a voltage of 5V. Unfortunately, the Barduino and its ESP32 only has a voltage of 3.3V.
Connection
The connection is quite simple, the VCC goes to the 5V, the GND to the GND, the Echo to a digital pin, let's say the 12 and the Trig to another digital pin, the 11.
Code
Here is the basic code to read data from the ultrasonic sensor, to convert them into readable values (cm) and print it on the serial monitor.
To quickly create a PlatformIO project for the Arduino UNO, open a terminal and navigate to a freshly created folder and type $ pio project init --board uno. As simple as that.
Create in new main.cpp file into the src folder.
int trigPin = 11;
int echoPin = 12;
long duration, cm;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
cm = (duration/2) / 29.1;
Serial.print(cm);
Serial.print("cm");
delay(250);
}
Compile it and upload it to the UNO pio run -t upload and open the serial monitor pio device monitor to see the distance value calculated by the ultrasonic sensor. I'm impressed how fast and accurate it is.
Explanations
cm = (duration/2) / 29.1 is how we convert the duration to a distance, using a formula: distance = (traveltime/2) * speed of sound. The speed of sound is 343m/s wich is equal to 1/29.1 cm/uS. We need to divide the traveltime by 2 because the wave we sent hit the object and then returned back to the sensor.