Document
Output Devices
Output Devices
.png)
For this week assignment I tryed to control the 5V servo motor Sg 90. For control was use the Attiny 45 microchip, and for design the board the Kicad software.
Components:
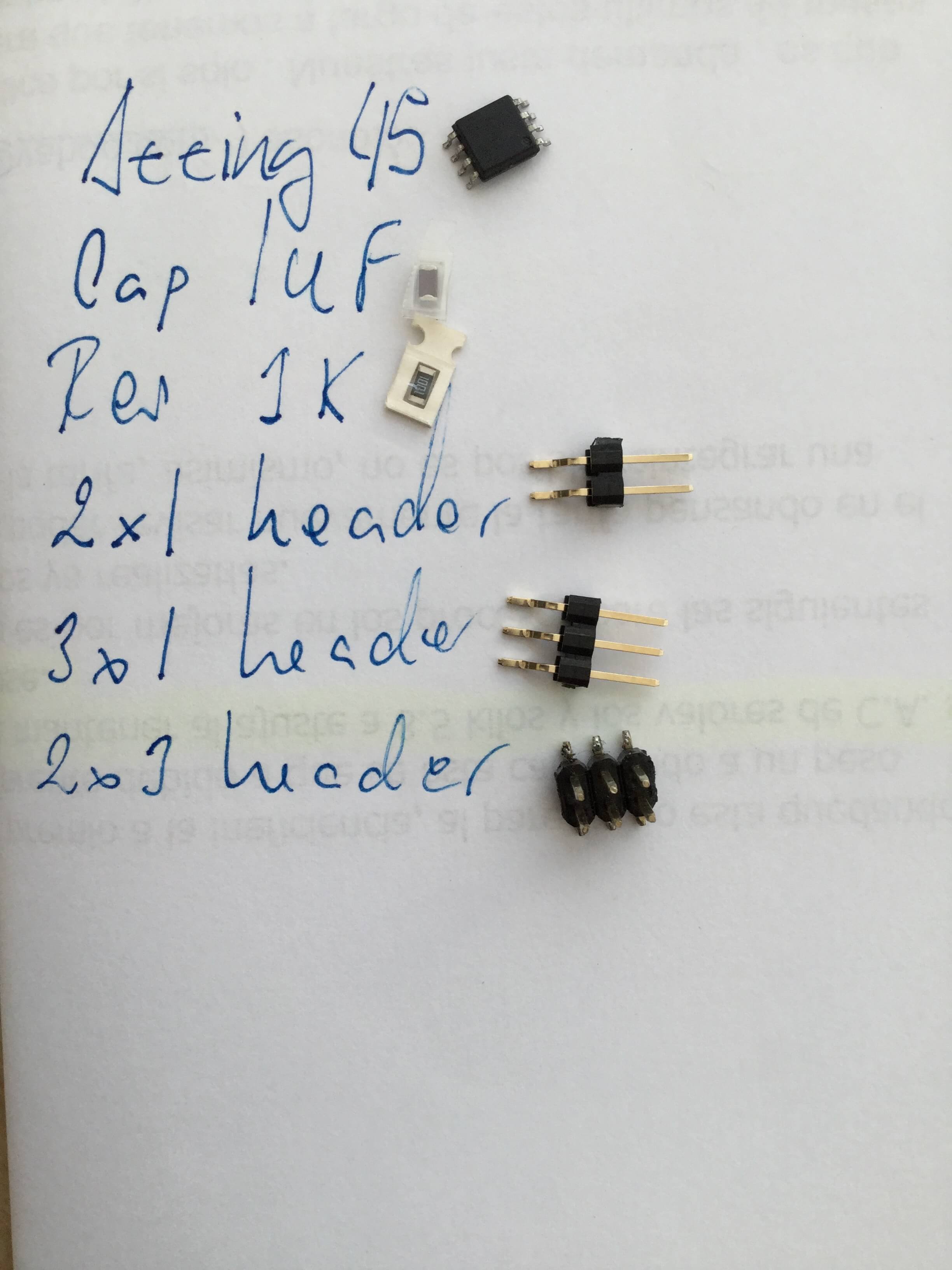
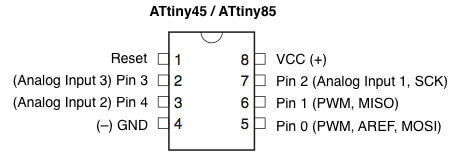
For design the schematic is important to know the pinout of the micrichip: So, in this example I connect the PWM output (for control the servo, the others outputs are ground and current) of the servo with the pin 3 (physically the pin 2) of the Attiny 45.
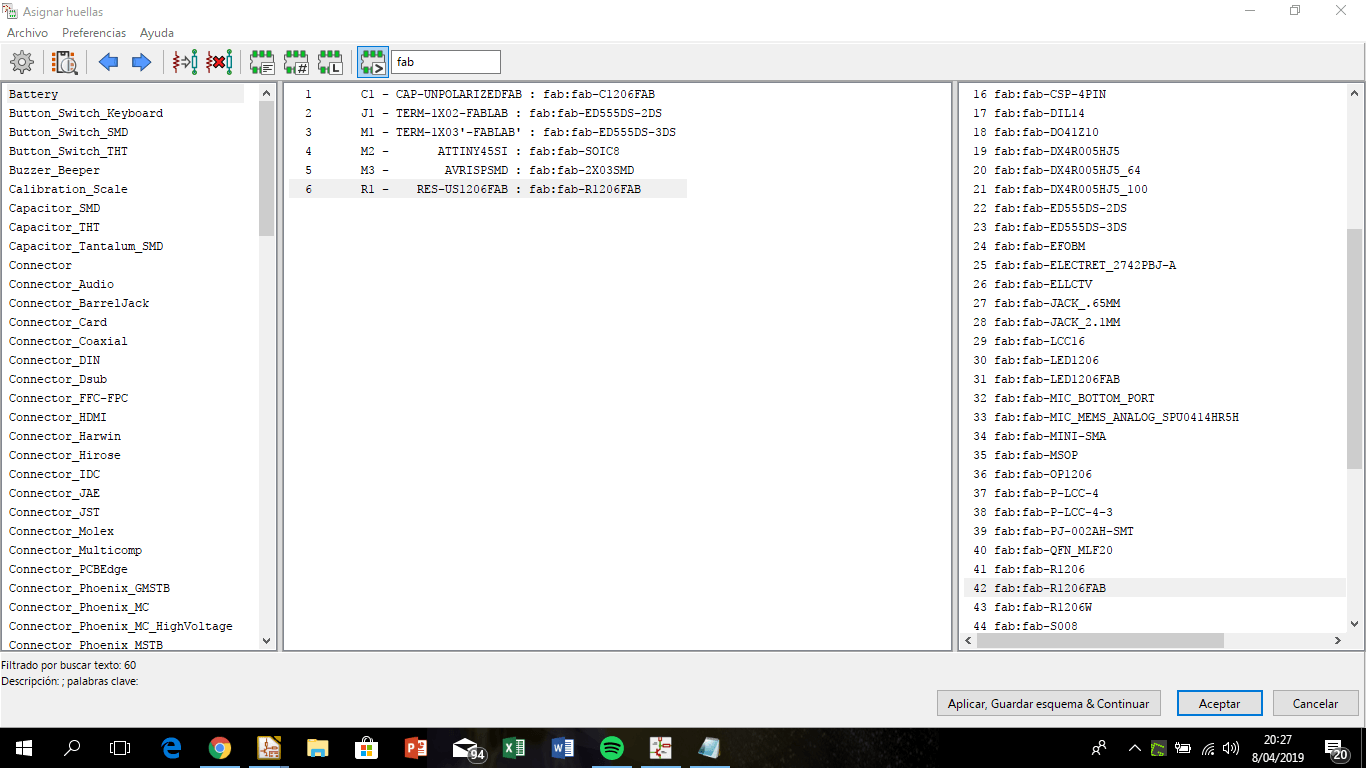
In Kicad is necesary to assign the footprints to the components in the schematic construction.
 Click to expand
Click to expand
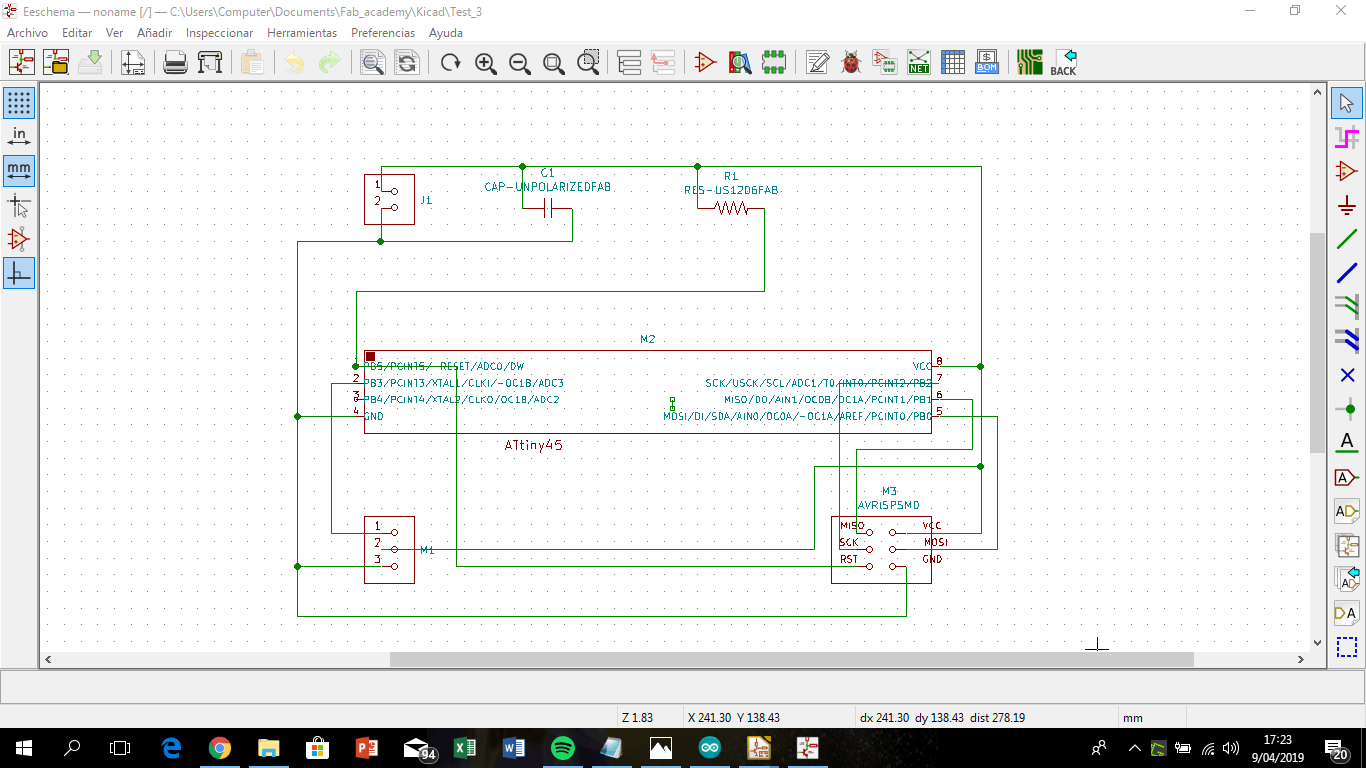
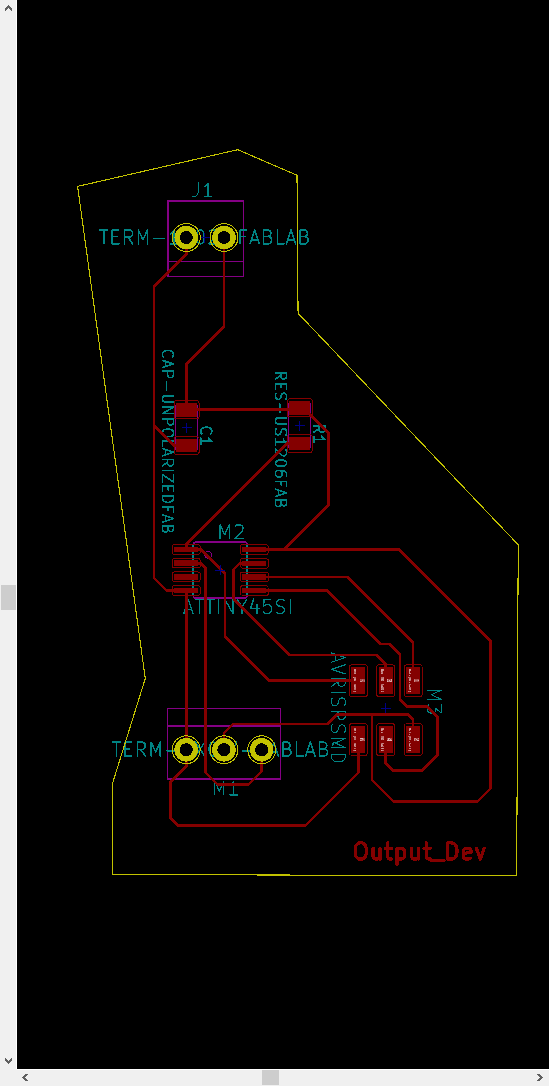
The schematic
The board: In Kicad (board framework) for print it, I select the layers for traces and interior and export (red and yellow) as PNG, then process in Mods and generate a .rml file.
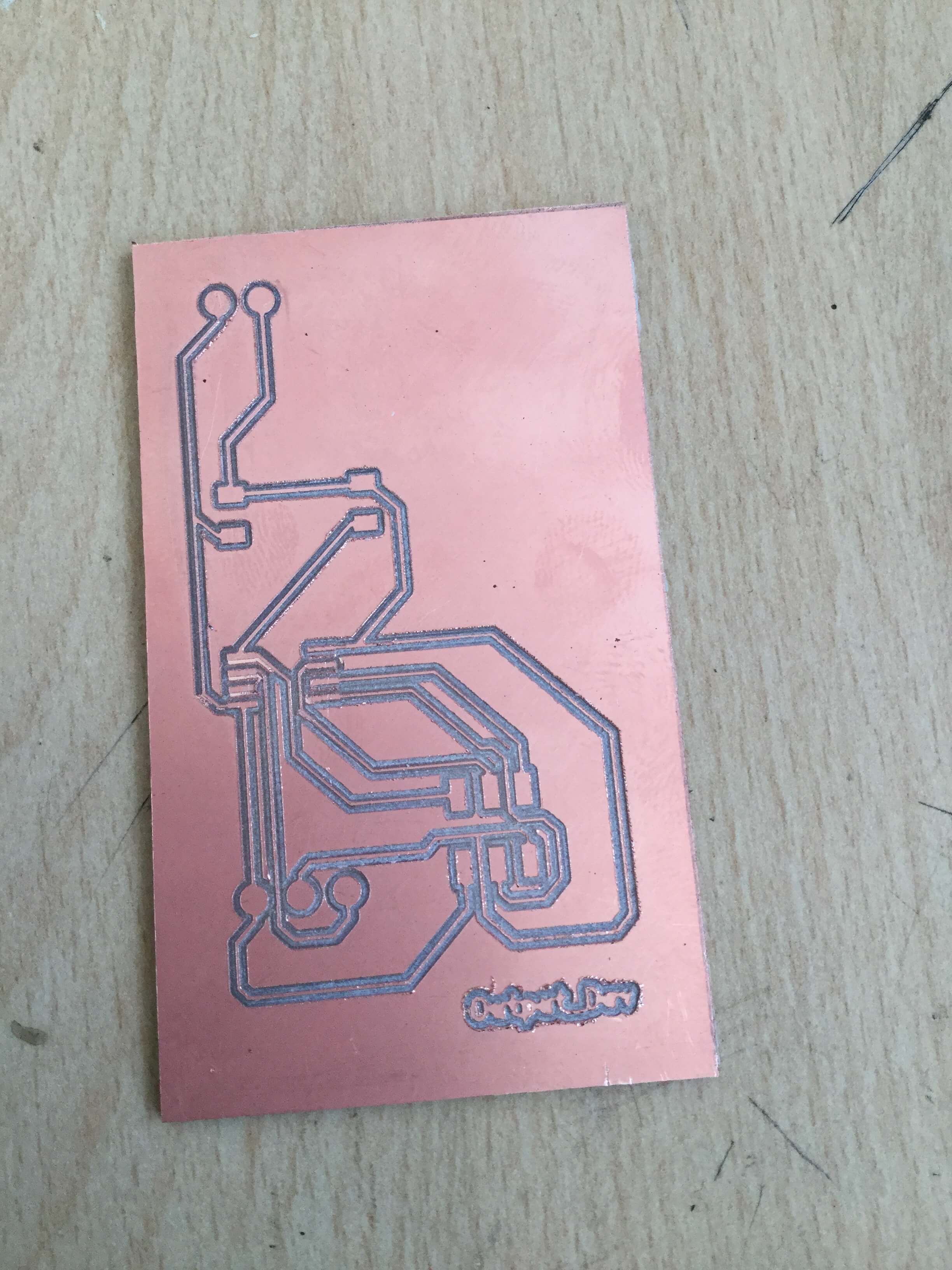
Once I have the .rml files, I work with Roland Monofab SRM 20 for machining the board.
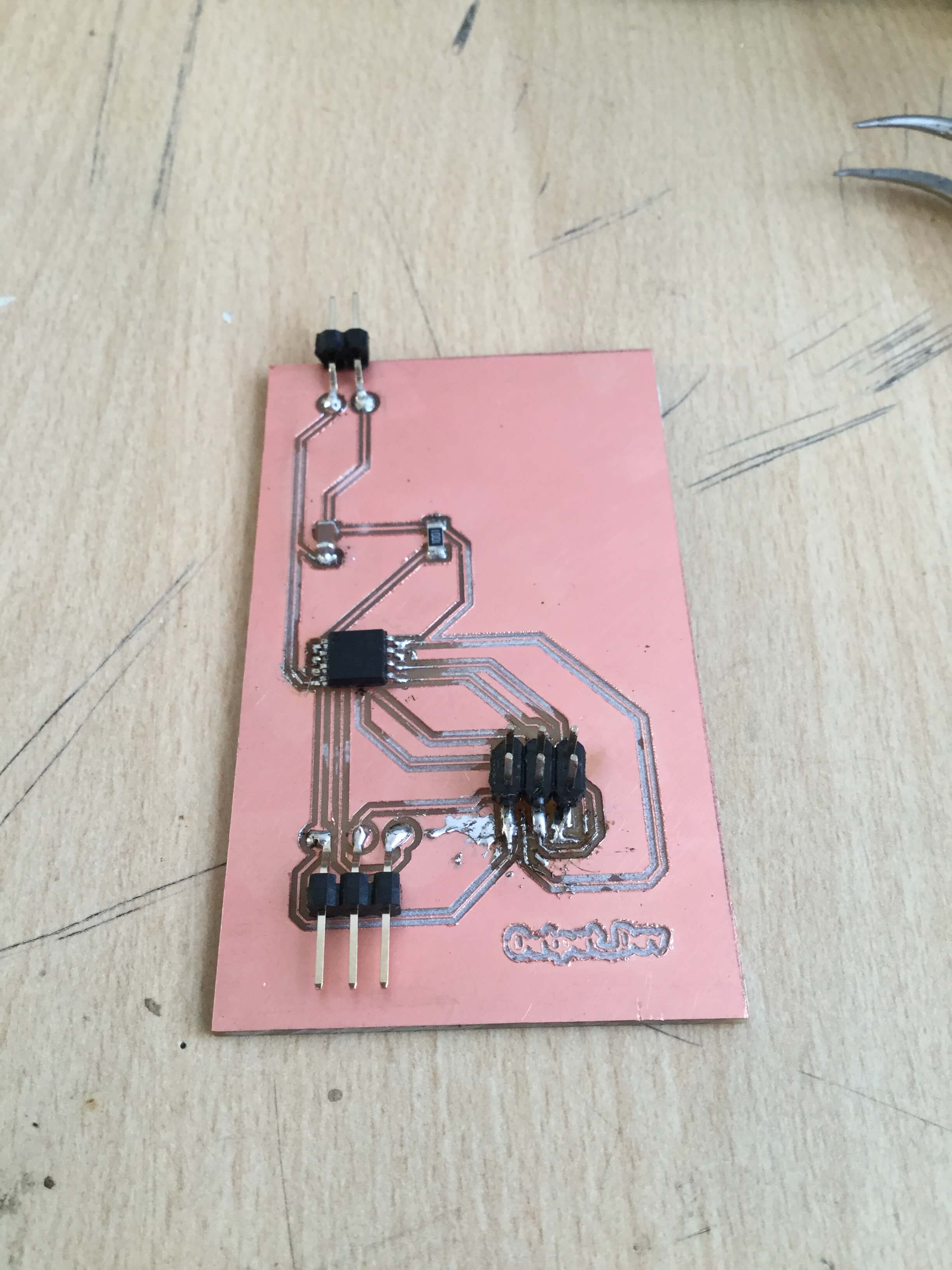
Finally I soldered de components.
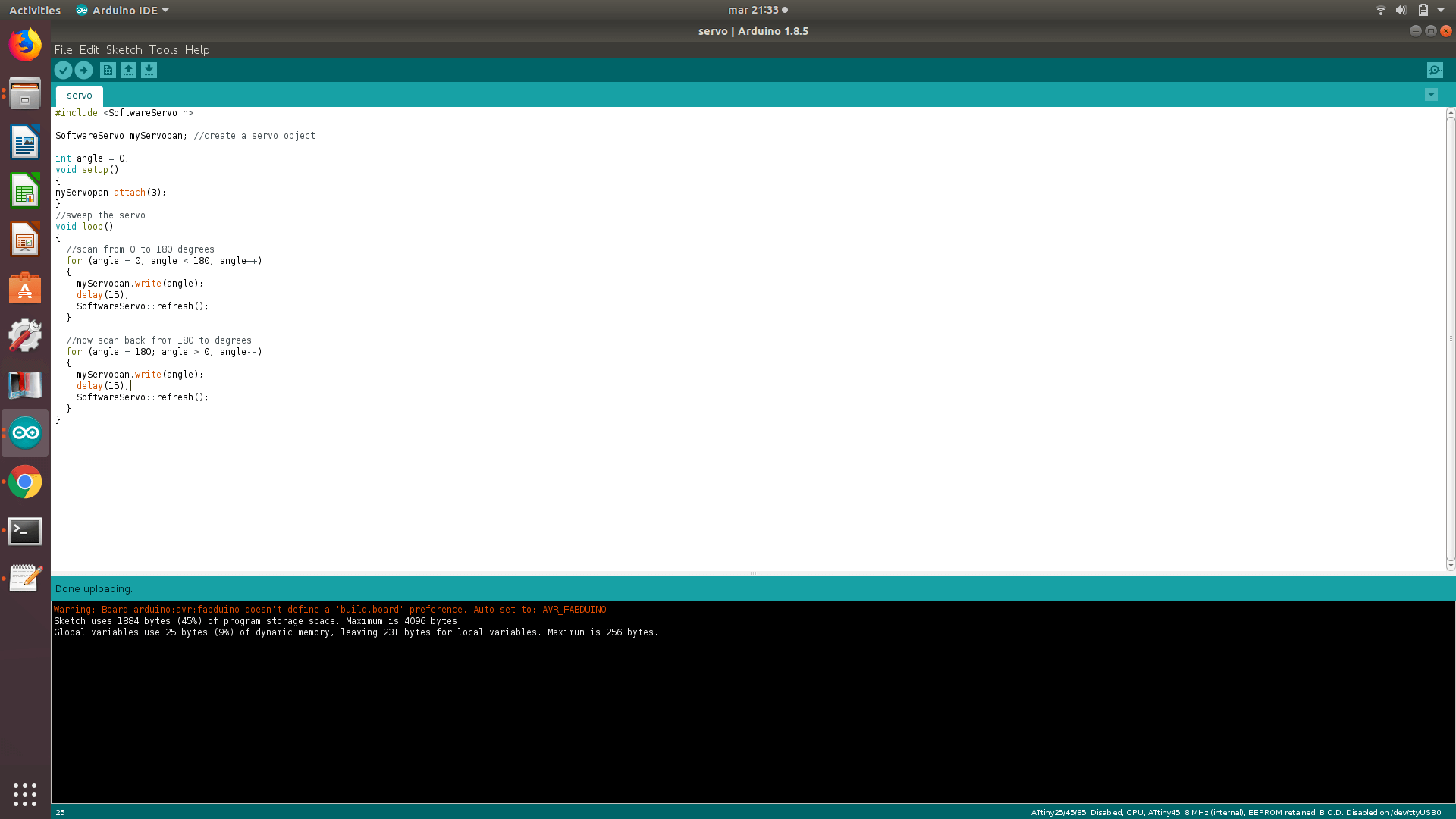
Then, I used the Arduino IDE for load the program in the microchip. For this process I use the AVR ISP as programmer, so I set it in the Arduino IDE.
 Click to expand
Click to expand
 Click to expand
Click to expand
For control the servo, I use the SoftwareServo librarie, and this code, that explains each function of the command line (as comments):
#include < SoftwareServo.h >
SoftwareServo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
void setup()
{
myservo.attach(3); // attaches the servo on PB3 to the servo object
//myservo.attach(4); // attaches the servo on PB4 to the servo object (i didn´t use this pin)
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
SoftwareServo::refresh(); // must call at least once every 50ms or so to keep your servos updating
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
SoftwareServo::refresh();
delay(15); // waits 15ms for the servo to reach the position
}
}
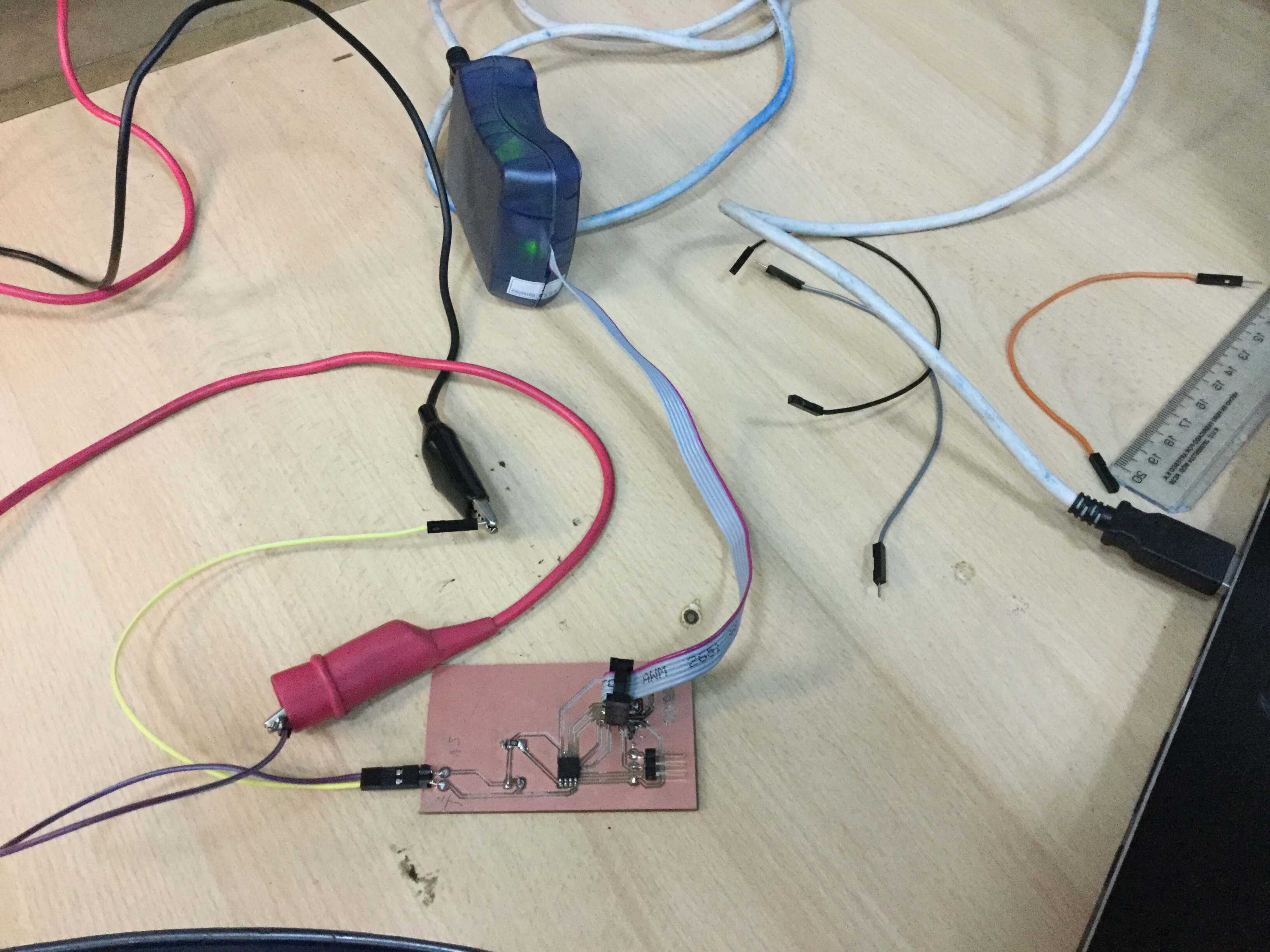
Finally, I test the board, using a 5V current source and the servo moved.

Asignment goals
- Measure the power consumption of an output device (Group assignment).
- Add an output device to a microcontroller board you've designed and program it to do something.
Board Files
Learning outcomes
- Demonstrate workflows used in circuit board design and fabrication.
- Implement and interpret programming protocols.
Have you?
- Described your design and fabrication process using words/images/screenshots, or linked to previous examples.
- Explained the programming process/es you used and how the microcontroller datasheet helped you.
- Outlined problems and how you fixed them
- Included original design files and code