21 Final Project¶
A bit confusing and feels a bit redundant to discuss the Final Project again here but just following up on the objectives we need to prepare the marketing materials and final build here.
Choices, choices, choices … to be made here.
Did i simply join Fab Academy 2019 to get my certification as fast and simple as possible?
Or grab this opportunity to, for once in my life, educate myself and at the same time fully emerge and enjoy the experience AND try to make minimal impact on an ever growing group of Makers and DIY people in the world?
Even though i might jeopardize my deadlines and potentially my contractual obligations to the sponsor i want to be proud of my project and launch it after FabAcademy as open-source.
What was done on the project?¶
Week 3: Initial conception of the revolver head and first parametric design of the XYZ motion system Week 11: Input week the end-stopper and proximity/distance sensor Week 12: Output week stepper motor controller with integrated end-stopper Week 14: Build the wireless main controller board for the final project based on ESP32 with virtual COM ports connecting to the motor drivers. Week 16: User Interface and interfacing infrastructure built Week 15 / Week 17 Machine building & design the full SVG to CNC workflow using CNCJS as platform
Marketing & Presentation¶
All that needs a good catchy name so i sat down with a beer and came up with “RotoPick” and started to think of it as a startup rather than a Fab Final project. But the rest of the story is ofcourse identical, work work, try and fail and do again.
We need a logo (courtesy of Looka.com’s AI engine)

More compact format “AI-dvised” to me

Final project questions and answers¶
With the logos and the baseline story and answers to the questions below i can build the project slide show
Questions to be answered:
What is RotoPick?
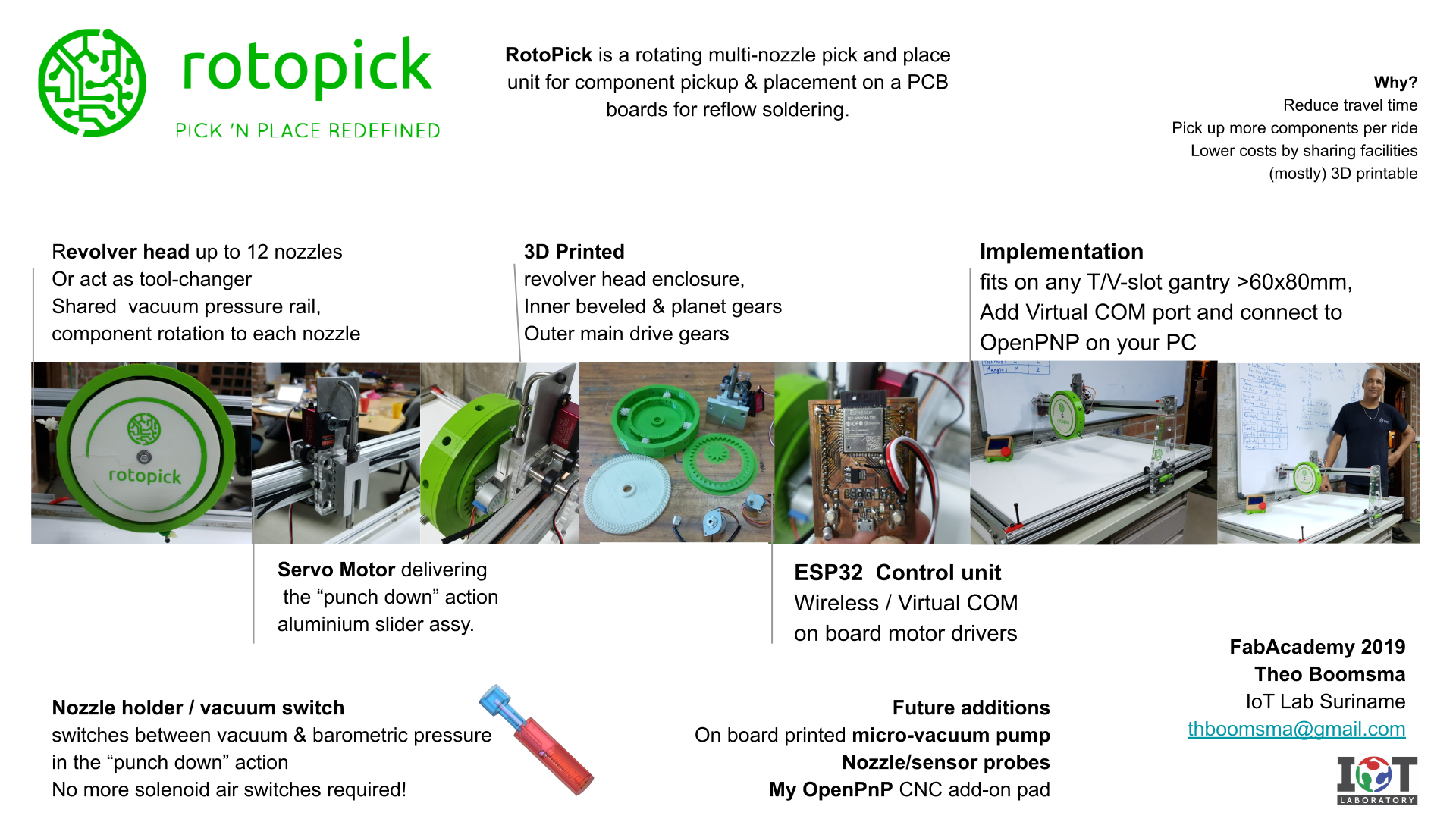
RotoPick is a rotating multi-nozzle pick and place unit for component placement on a PCB for reflow soldering.
Why?
Many DIY pick and place machines efforts have been made all using pickup heads consisting of a servo or stepper to push the head down for pick or place, a vacuum pump and solenoid air-valve to add/remove vacuum, a nema14 stepper motor with hollow shaft rotate/calibrate components selected and to pass the vacuum pressure to the nozzle. The mostly used nozzles are Juki types. The head is mounted on an XYZ motion frame and typically travels between component tray and workpiece once per component resulting in a lot of motion for each project. To reduce travel some increased the number of pickup heads to 2 or even 4 (doubling up all above mentioned and thus increasing investment costs.
RotoPick design
RotoPick is a component pick and place (PnP) revolver head hosting up to 12 nozzles, thus allowing PNP machines to pickup and deliver up to 12 components from pickup zone to workpiece. It can also act as a tool-changer for PNP hosting a selection of different purpose pickup nozzles.
RotoPick provides shared facilities like suction pressure rail, component rotation to each nozzle from a compact enclosure
RotoPick nozzle holder
Critical part designed for this is the nozzle holder that switches between vacuum & barometric pressure in the “punch down” action.
Current model was built for Juki type nozzles but adapters will be available for other types.
What just happened to Pick n Place?
- No more for solenoid air-valves
- A single hollow-shaft nema14 for 12 nozzles
- Add a single stepper for component calibration
Housing & moving parts
RotoPick has 3D printed housing, gears and nozzle holders with built in yaw stepper motor, external rotational stepper motor and a servo motor delivering the “punch down” action via an aluminium slider assy.
Control unit
The control unit operates semi-independent and is built around the ESP32 module that connects wirelessly to your network offering full control and monitoring via Virtual COM port. Drivers for stepper and servo control and micro-vacuum pump are alsonbuild in. Sensors include hiight probe add-on allowing the system height to be perfectly aligned, vacuum pressure & pulse sensing to detect vacuum engage on the system (active head engage).
Implementation
The whole system fits on an Openrail or V-slot gantry of at least 60x80mm, but with adapters it should work on any XYZ motion system accurate, sturdy and fast enough to provide PNP.
Connect to OpenPNP by just adding the VirtualCOM to your system and control it as if directly connected to your PC.
Sources
Internal stepper was sourced from an old CD-rom player and the rotational stepper from an old harddrive stepper.
Electronics sourced online and some mechanical parts were upscaled from engineering projects.
How much did it cost?
The RotoPick head itself cost us roughly $30 in parts as we used existing harddrive and CD-Rom motors. I think a DIY build would cost around $100 including 3D printing and electronics.
The XYZ motion system was also mostly built from available materials but would cost roughly $250 when build from purchased parts.
Add-ons
The RotoPnPLab
Your own plug in PNP Lab offers you the rest of the OpenPNP facilities in a quick to setup box. Assemble kit and set it up on your CNC system, connect to power and laptop and run your own OpenPnP on any CNC.
NozzleHolders
Assortment of smart nozzle holder/adapters for other types of nozzles
RotoPick Adapters
Assortment of adapters for fitting RotoPick to standard CNC machines or standards on the market.
Final Project Poster¶

The resulting project information poster
{kind=link}
Final project video¶
Now it’s time to show off the functioning rotating nozzle holder in a short video explaining its workings in more visual details

Final project dedicated page¶
The final project summary page can be found here
The final project detailed activity page can be found here
Implications¶
I hope a RotoPick delivers now and in the future on the promise to help the DIY and makerspace in small scale electronics production from home on any existing XYZ host system.
Thanks for the experience @ FabAcademy 2019

License¶
License for my work was selected in week 19: Invention, intellectual property and income

This work is licensed under a Creative Commons Attribution 4.0 International License.