Output Device
Assignment : Add an output device to a microcontroller board you've designed and program it to do something
Work
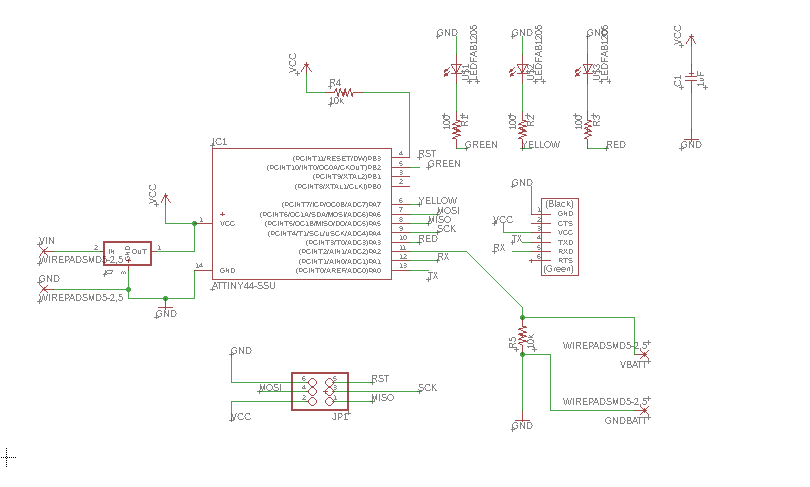
For This Assignment first I use my Hello Board produced in the Electronic Production Week, and I use Arduino Ide for program It. The first sketch i do, I use as output a piezo and I connect it on a PWM PIN.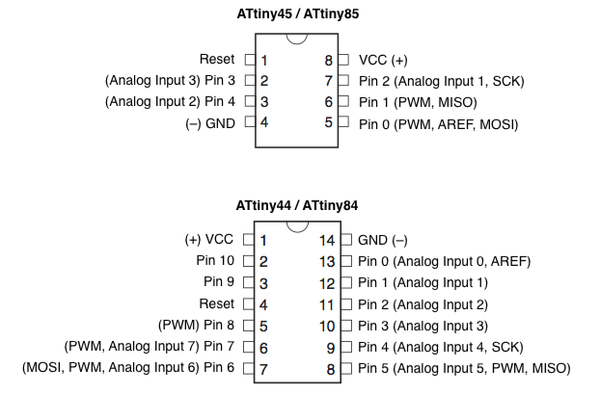
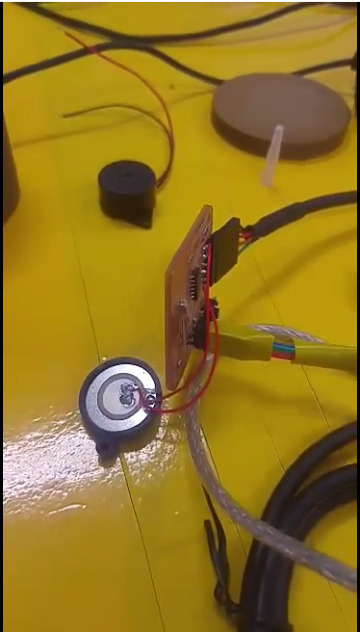 Here you can see the video of the sketch:
Here you can see the video of the sketch:Tone Melody Attiny44 - Piezo
#define c 3830 // 261 Hz
#define d 3400 // 294 Hz
#define e 3038 // 329 Hz
#define f 2864 // 349 Hz
#define g 2550 // 392 Hz
#define a 2272 // 440 Hz
#define b 2028 // 493 Hz
#define C 1912 // 523 Hz
#define R 0
int speakerOut = 8;
int DEBUG = 1;
void setup() {
pinMode(speakerOut, OUTPUT);
}
int melody[] = { C, b, g, C, b, e, R, C, c, g, a, C };
int beats[] = { 16, 16, 16, 8, 8, 16, 32, 16, 16, 16, 8, 8 };
int MAX_COUNT = sizeof(melody) / 2; // Melody length, for looping.
// Set overall tempo
long tempo = 10000;
// Set length of pause between notes
int pause = 1000;
// Loop variable to increase Rest length
int rest_count = 100;
int tone_ = 0;
int beat = 0;
long duration = 0;
void playTone() {
long elapsed_time = 0;
if (tone_ > 0) { // if this isn't a Rest beat, while the tone has
// played less long than 'duration', pulse speaker HIGH and LOW
while (elapsed_time < duration) {
digitalWrite(speakerOut,HIGH);
delayMicroseconds(tone_ / 2);
// DOWN
digitalWrite(speakerOut, LOW);
delayMicroseconds(tone_ / 2);
// Keep track of how long we pulsed
elapsed_time += (tone_);
}
}
else { // Rest beat; loop times delay
for (int j = 0; j < rest_count; j++) { // See NOTE on rest_count
delayMicroseconds(duration);
}
}
}
void loop() {
// Set up a counter to pull from melody[] and beats[]
for (int i=0; i
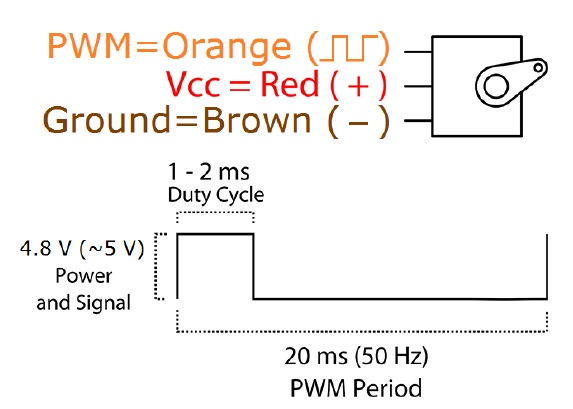
After this Test I try to understand How I can Program a servo and a Stepper Motor, because I need to use them in the Machine Disign Assignment. I first use Arduino and a bradboard, and I create a small cirtuit first with the servo, and after with the stepper motor. The Servo I use is the SG90.

This is th Cirtuit:
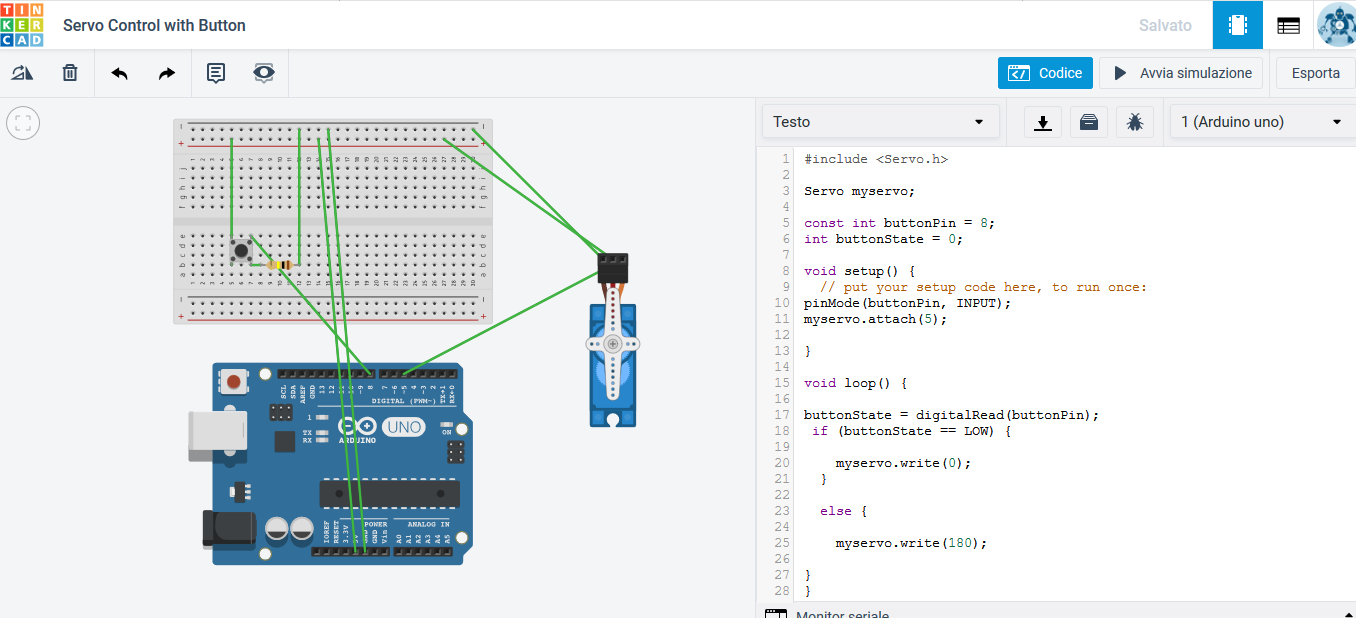
Simulation with Thinkercad
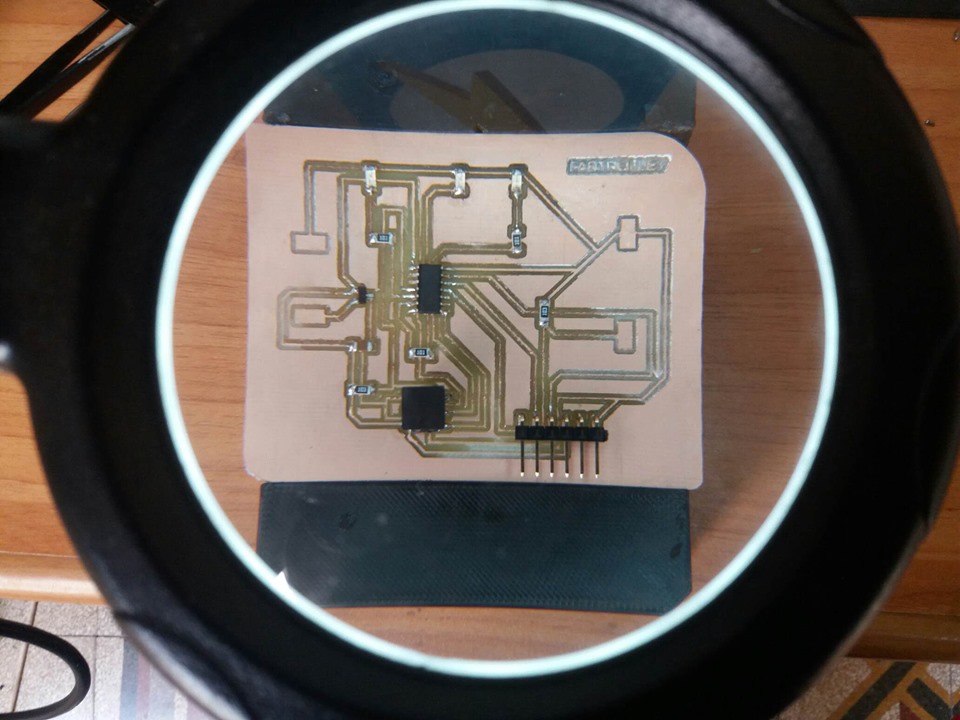
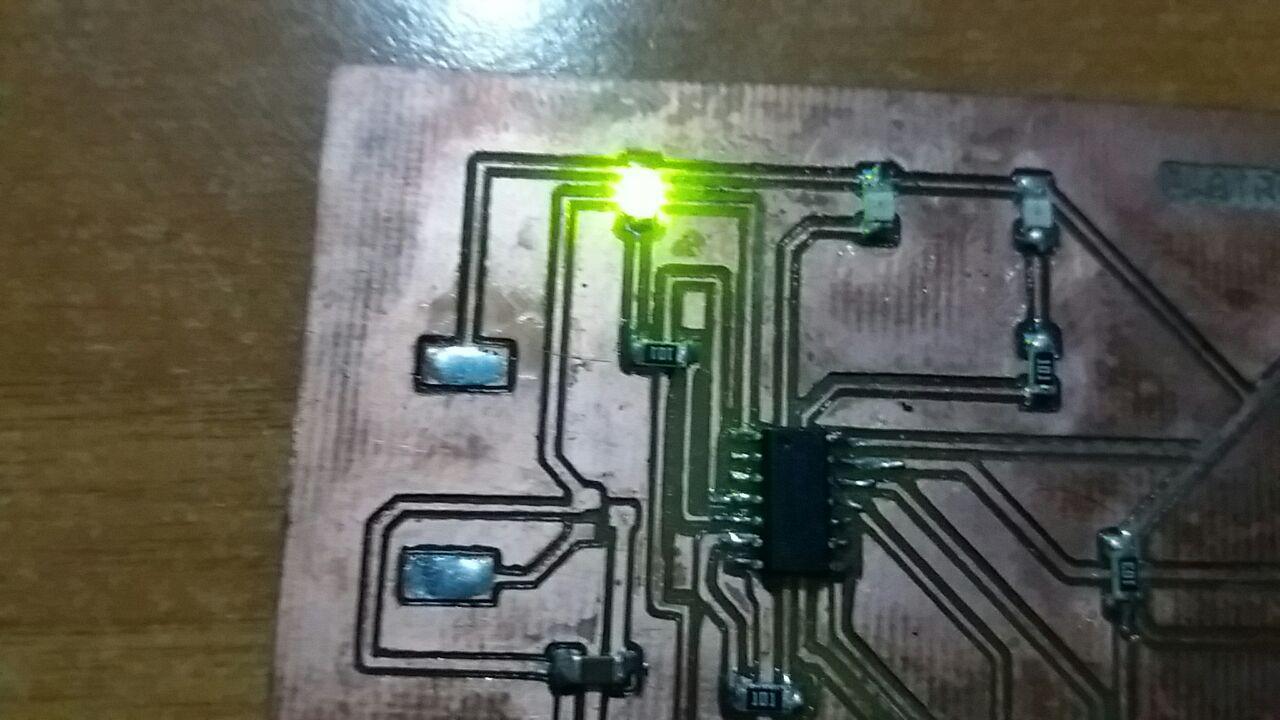
With the board built for my Final Project I made a small sketch to test the LEDs on the board.
You can find all the information on how I designed and created this board on the Final Project page.
Download ZONE
- Servo_control_with_button
- Servo_control_with_button - Thinkercad schematic
- Tone Melody Piezo
- Blink with FabTrolley board
- Blink Hex File
- Back To: Home
- Date: 26th April
- Topic: Output Device