
FabFlyPong
First of all: We decided to create a ball tossing game using the idea of a SkyCam, you can read more about our idea, why we created it as we did and how it came together on our group page.
The Winches
First of all I used Fusion 360 to create a winch model, which was straightforward. Just some cylinders and differences between them. The middle shaft of the motor is 5mm big. The holes to fix the rope are vertically through the top plate and horizontally through the middle part of the winch. There are two holes horizontally through the top part of the winch, where we put 2mm wide screws in to fix the winch on the motor shaft.
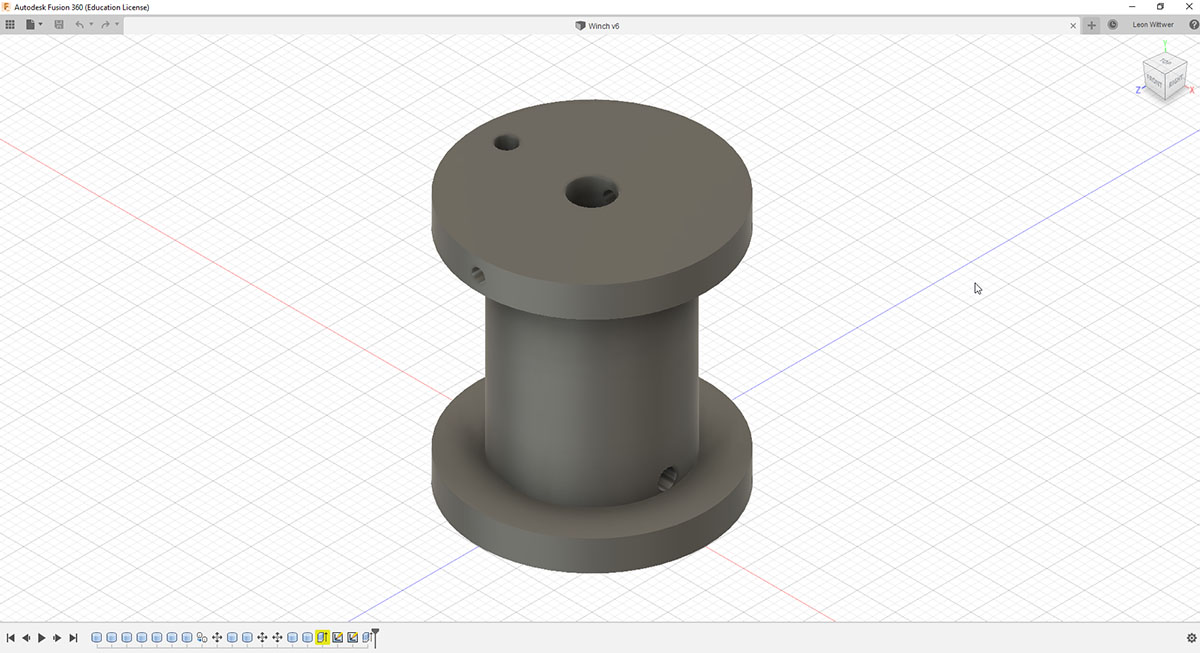
The model of the winch in Fusion
Then I started with test printing. I decided to use the Prusa i3 Mk2 we have in the lab to print everything and used a Layer height of 0.1mm for good precision and an infill of 100% to get good stability of the winch. I did several test prints of the object shown below with different values for the size of the hole in the middle to finetune the size to the prusa and the winch shaft. I also printed the small hole you can see in the image on the right in different sizes to see which would be the perfect size for a 2mm screw.

The test print for the motor shaft and screw
With this fine tuning, I could finally print the winches with parameters so that they fitted perfectly.
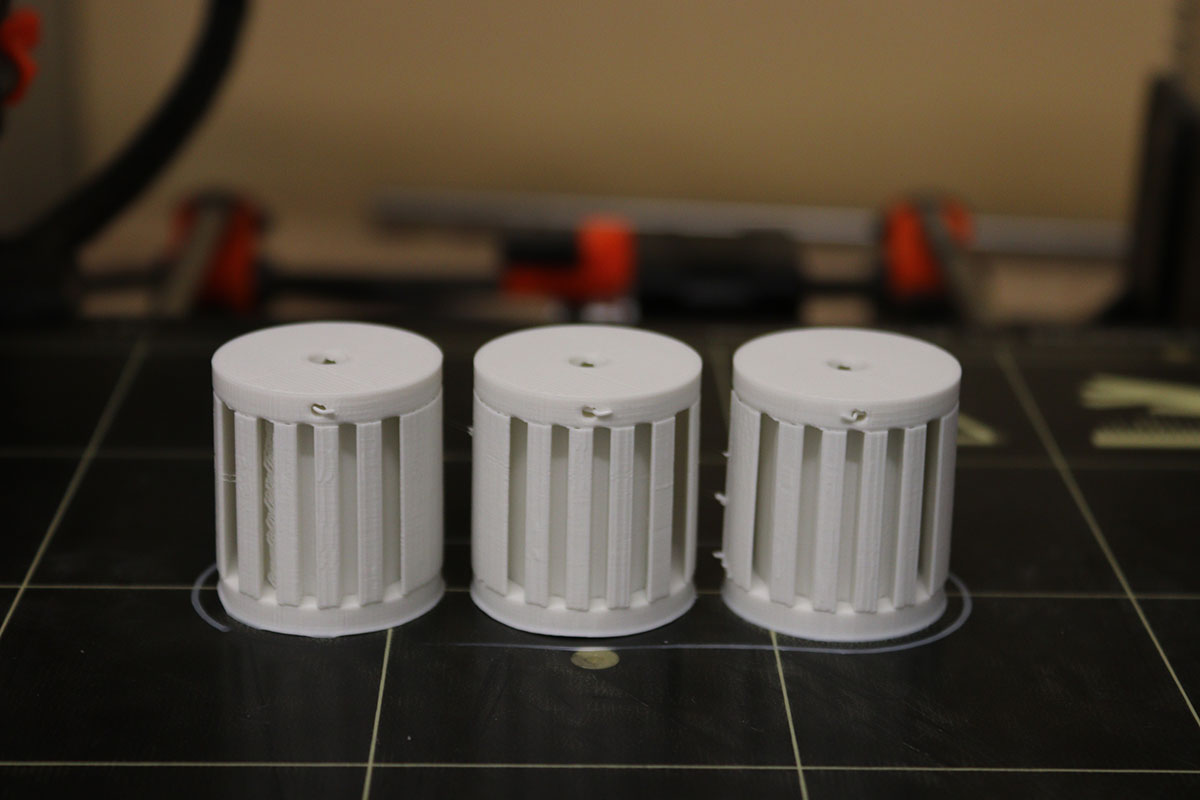
The print of three of the winches
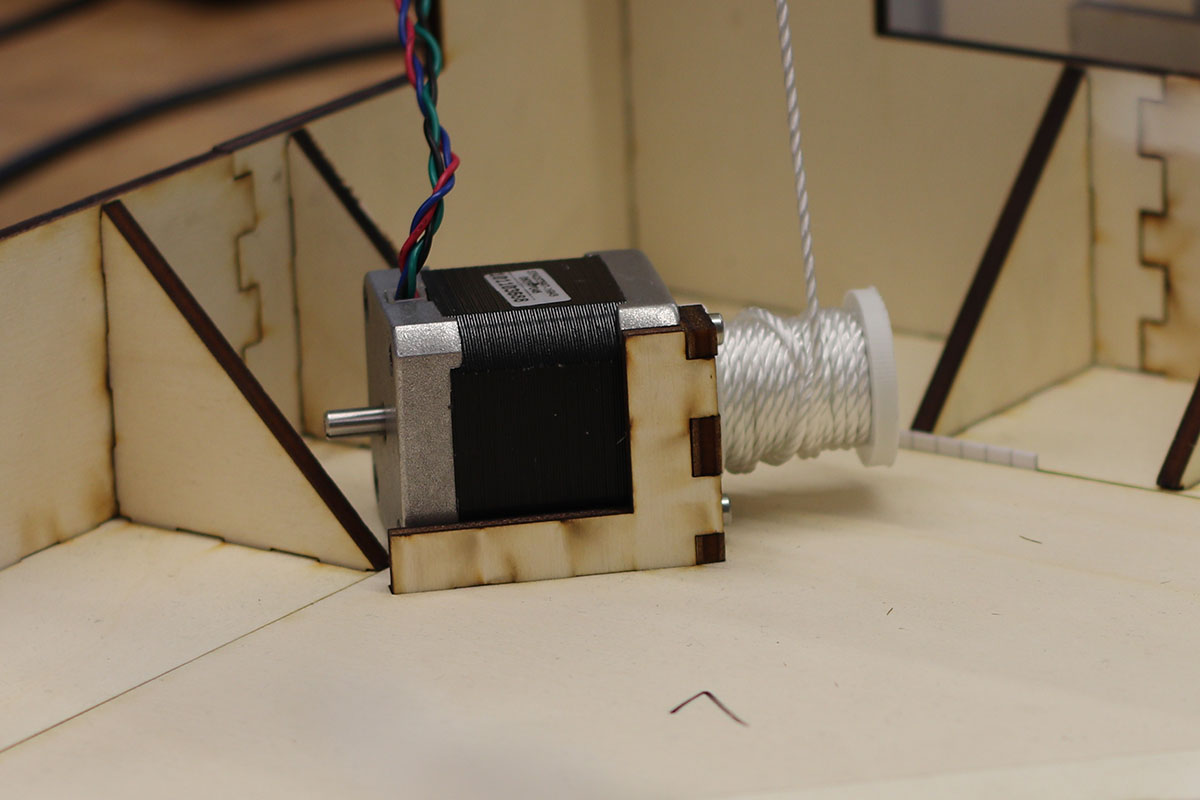
Here you can see the winch working on the motor shaft with rope on it
The Frame
First of all I decided to create a frame with 4 towers for the ropes. Then I decided it should be 50cm high and the ground plane should be 100 x 100cm. I wanted to assemble every tower individually and connect them afterwards. Each tower consisted of 6 big parts, the plates and a lot of connectors for stability.
So with that I went to OpenSCAD, to design the frame parametrically, so that we could easily make changes if we need a bigger or higher frame or whatever. It started out good, but it got messy pretty fast. When working with OpenSCAD for such a design it is important to work more clean then I started, with really good functions and abstraction, otherwise it is just confusing. So in the end I did all the hard work, the outline of the parts and the finger joints in OpenSCAD. Afterwards I added the rest of the joints in Inkscape, because I didn't want to calculate normals of skewed joints to adjust for kerf.

One tower of the finished frame ready for cutting
Then I went to test my design for kerf and if my designs could stay together as I wanted on a small scale.
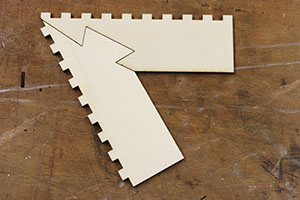
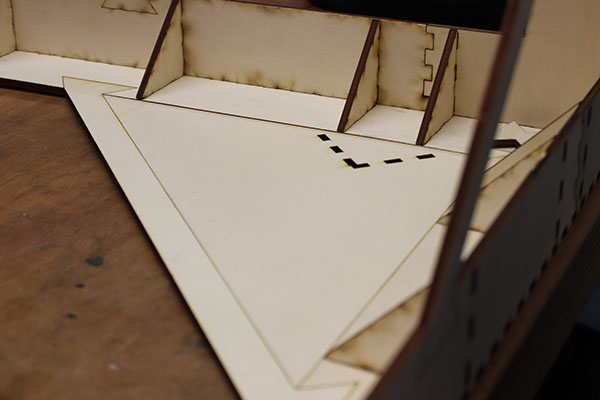
Angular joint

Joint for the low parts

And another one

From the back
Then I first cut a test tower to test if everything worked together. There I found that it was not rigid enough and there was play especially in the towers on all axis, because you had a long tower but only a small part of joints. This first tower you can see in the foreground on the next image. The improved version is in the background, and it was rigid enough to make the frame. The improvement was small wood strips with a really high anchor point on the tower, so that the towers have more stability.
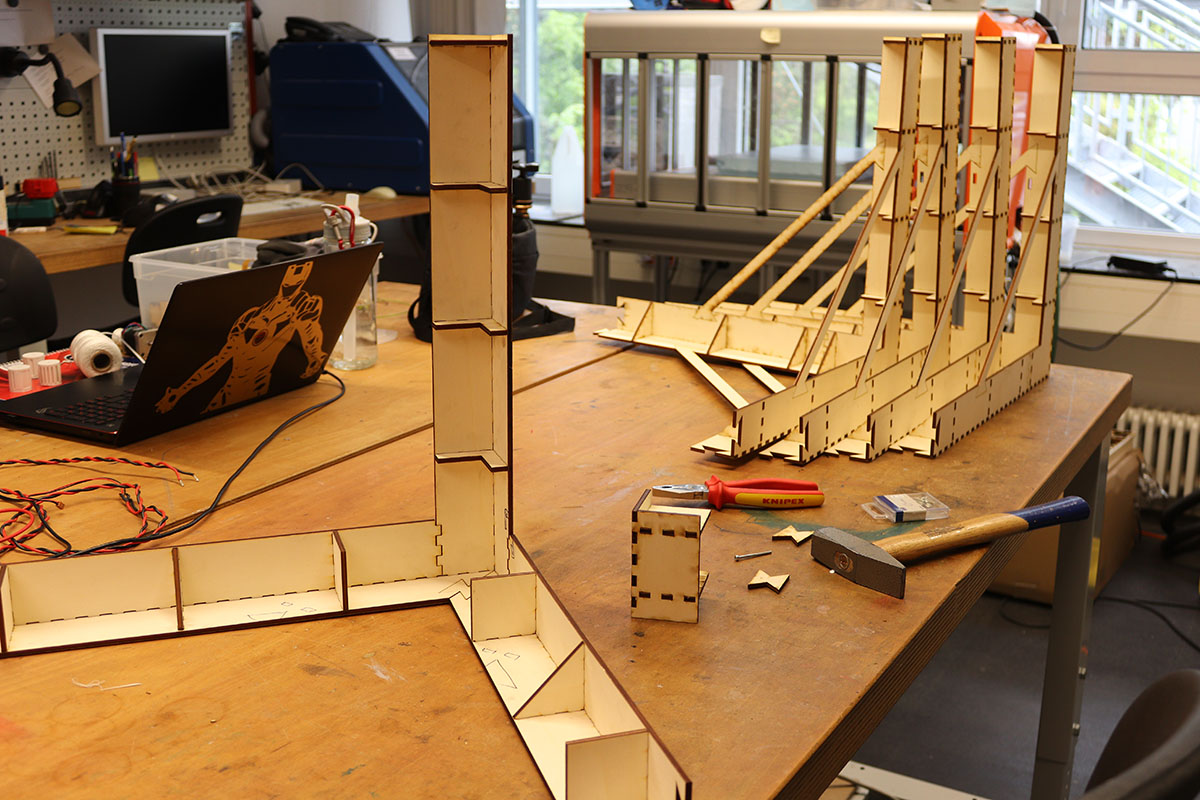
The evolution of the tower
And after cutting everything and hammering everything together, because my press fit was really tight, I finally had the finished frame in front of me.
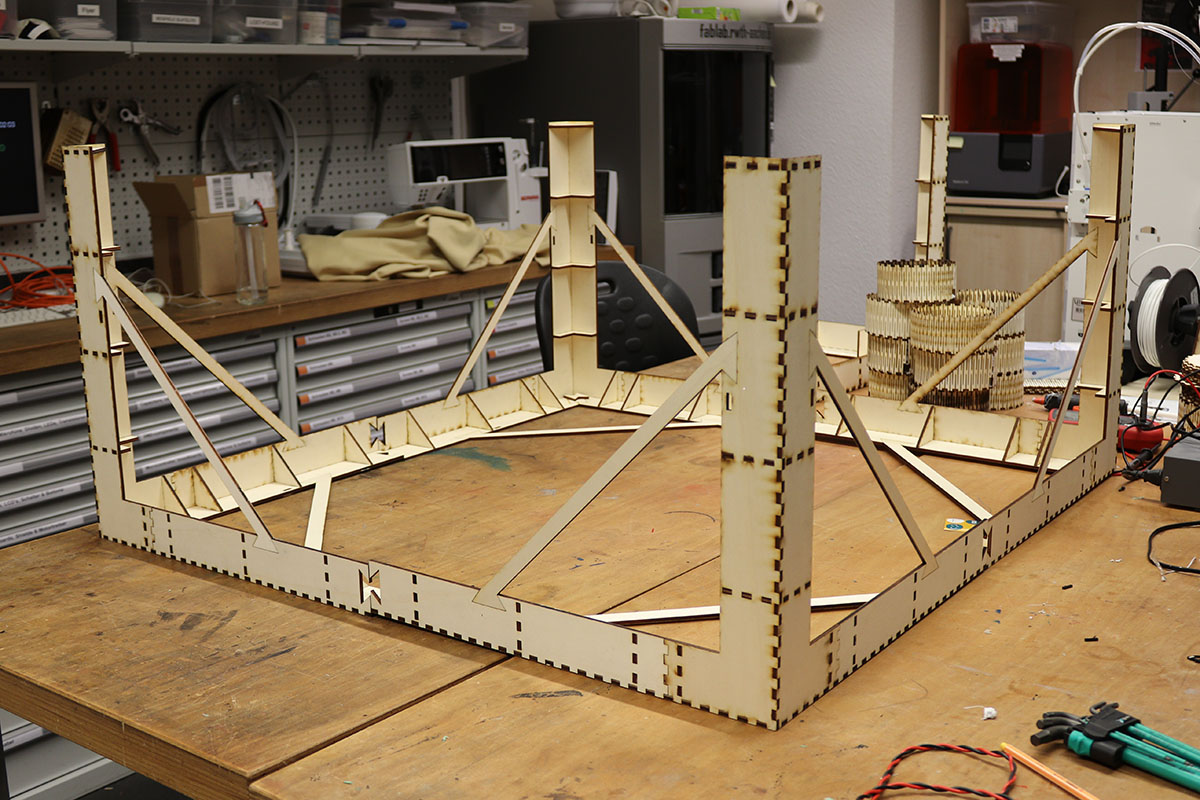
The finished frame
Then I still had to design the motor mounts for the Nema 17 Motors we used:
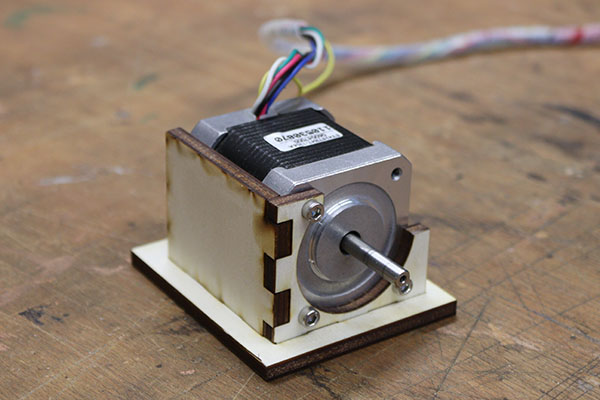
The motor mount
Ground plate for the motor mount
And put the hooks for the rope into place and my part was finished.

The hook at the top of the tower
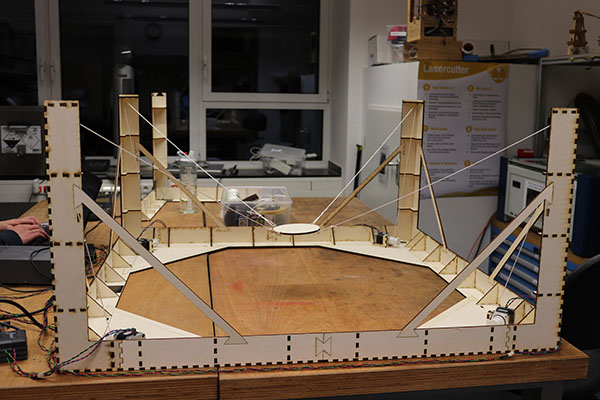
The finished frame with motors and ropes
Files
Here you can download the files created during this week:
The finished winch fusion file
The finished winch stl file
The winch test fusion file with all the test prints
The frame designed in openscad
The frame svg ready for cutting
All the test cuts I did