Mechanical Design
For this assignment we were a mixed group with FabAcademy classmates travelling from north Iceland. Complication was that due to mixed agendas we only had an overlap of three days together in Reykjavík. So our priority was to be as efficient as possible.
We diveded our tasks based on our strengths and mine is figuring out software.
The Group
were me,
Svanur,
Jón
(FabLab Akureyri) and
Karítas
(FabLab Sauðárkrókur)
sat together and discussed what we wanted to make.

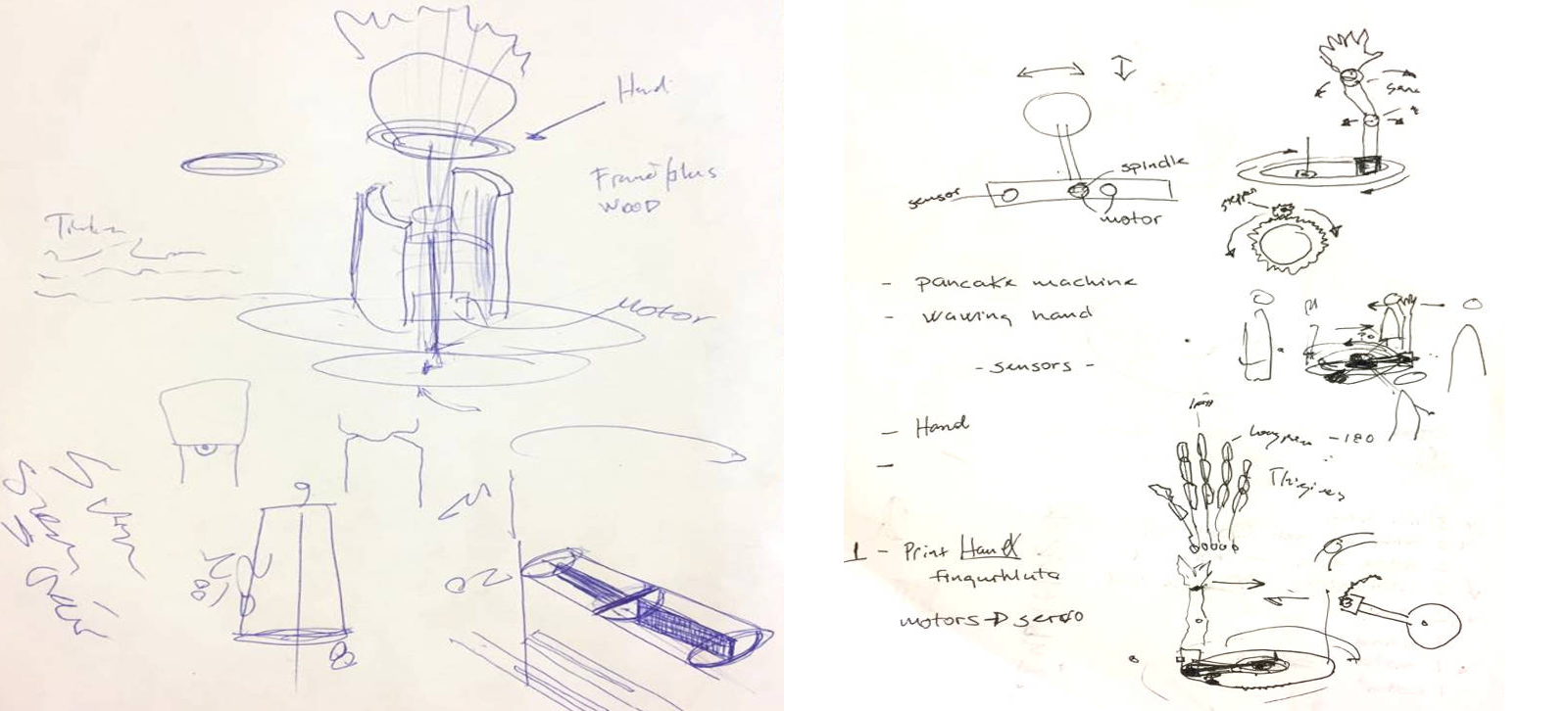 We came up with an idea to make a hand that rotates and waves. Behind the arm we wanted a sensor so that if someone is there, it rotates and waves to that person. We seperated our workload and my task was getting the
TinyG board
working. With the board there is a very clear
wiki page
that goes through programming and instructs how to get it working. It was easier than expected and I used
CoolTerm
to talk to the board. I typed commands in coolterm to run the motor live and I did not create any g-code file.
We came up with an idea to make a hand that rotates and waves. Behind the arm we wanted a sensor so that if someone is there, it rotates and waves to that person. We seperated our workload and my task was getting the
TinyG board
working. With the board there is a very clear
wiki page
that goes through programming and instructs how to get it working. It was easier than expected and I used
CoolTerm
to talk to the board. I typed commands in coolterm to run the motor live and I did not create any g-code file.
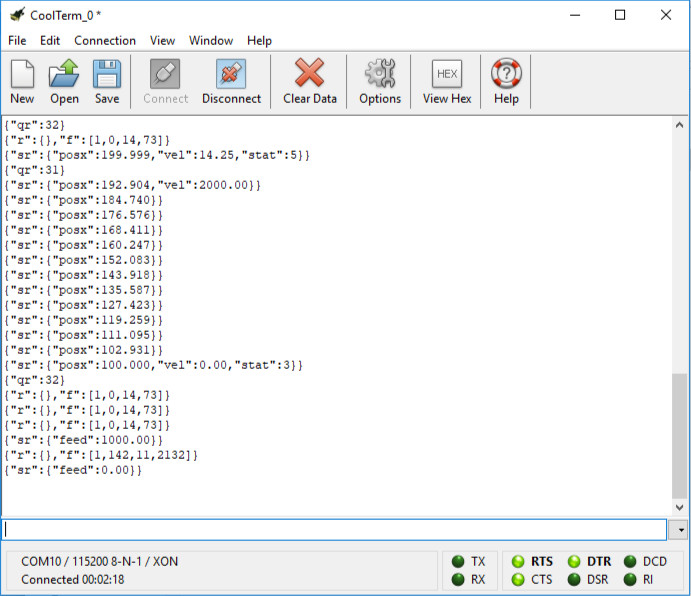 In the guide I'm following, it stated that I had to use the 1.4.3 version since the latest doesn't do well with sending large files. So uninstalled the newer version and installed the older one instead. The guide showed me how to connect the motor and it ran perfectly on first try. So I decided to test different speeds. Linda recommended looking at the
MakeMagazine's "Get to Know Your CNC: How to Read G-Code".
giving me insight on how to play around with g-codes.
In the guide I'm following, it stated that I had to use the 1.4.3 version since the latest doesn't do well with sending large files. So uninstalled the newer version and installed the older one instead. The guide showed me how to connect the motor and it ran perfectly on first try. So I decided to test different speeds. Linda recommended looking at the
MakeMagazine's "Get to Know Your CNC: How to Read G-Code".
giving me insight on how to play around with g-codes.
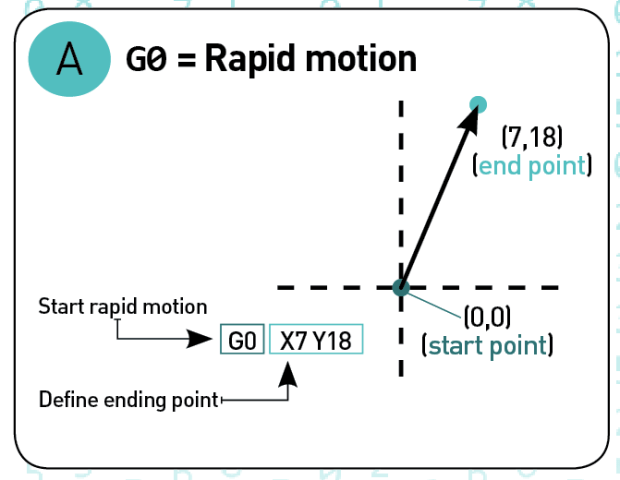 In g-code you have to declare which operation you are going to use, i.e. G0/G1.... Then you have to declare which axis is going to move and how far. G0 goes in rapid motion but G1 you have to declare how fast it will go.
In g-code you have to declare which operation you are going to use, i.e. G0/G1.... Then you have to declare which axis is going to move and how far. G0 goes in rapid motion but G1 you have to declare how fast it will go.
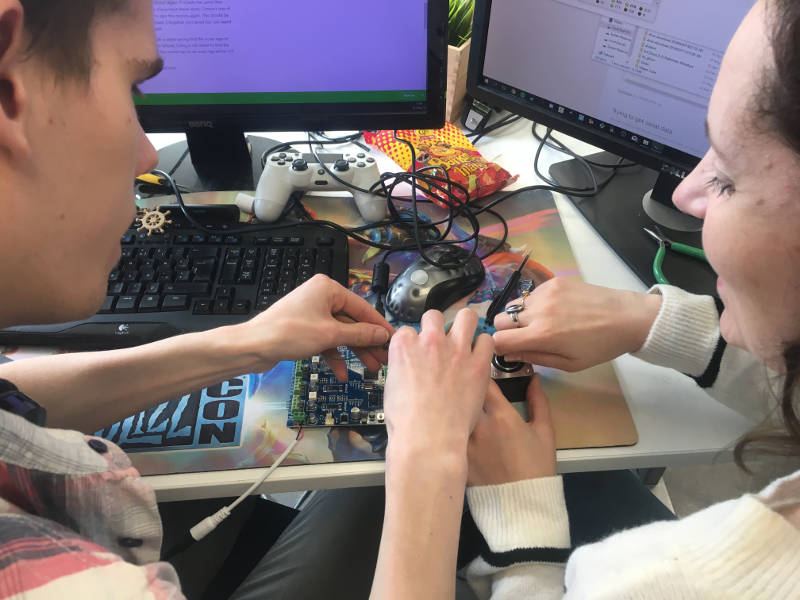
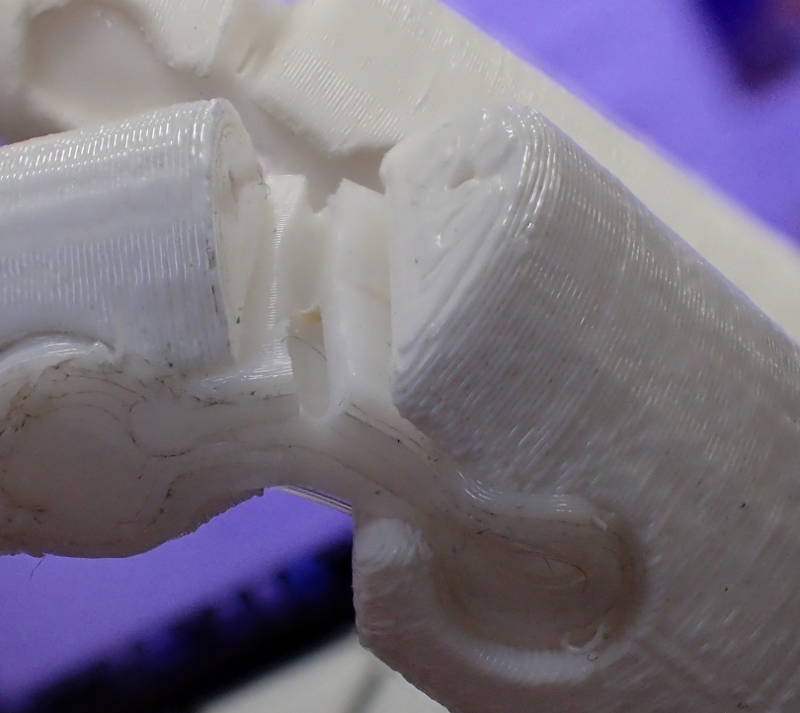
Jón and Karítas worked on designing the gear train prototype. Me and Svanur worked on 3d printing a finger for our project. Karítas assembled it, threading the wire through the parts. Then me and Karítas tested the g-code. We tried how fast and how long we should have to leave the motor running to make the finger bend.
 The finger is made of 4 parts that are printed seperately. To connect the parts we printed joints with TPU which is a flexible fillament. But when testing the result was a rather stiff movement. So I tried to cut them half way which made them more flexible.
The finger is made of 4 parts that are printed seperately. To connect the parts we printed joints with TPU which is a flexible fillament. But when testing the result was a rather stiff movement. So I tried to cut them half way which made them more flexible.
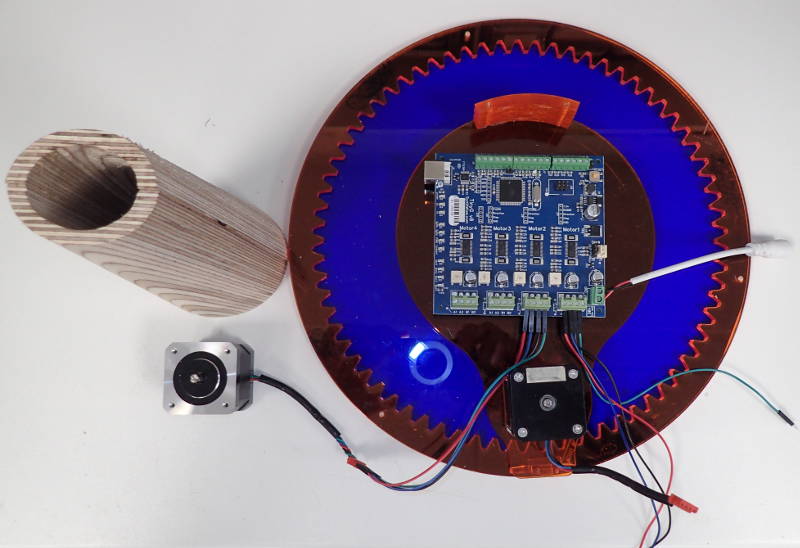
This picture shows the version 2 of the base of the hand. We had the TinyG sitting in the middle. Because the TinyG is connected to the computer, we had to limit the rotation from 360° to 180° so the wires wouldn't tangle.
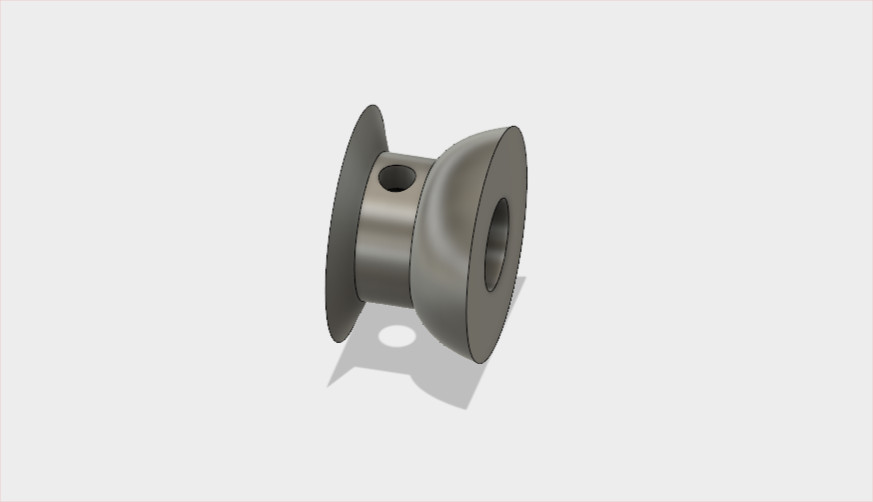
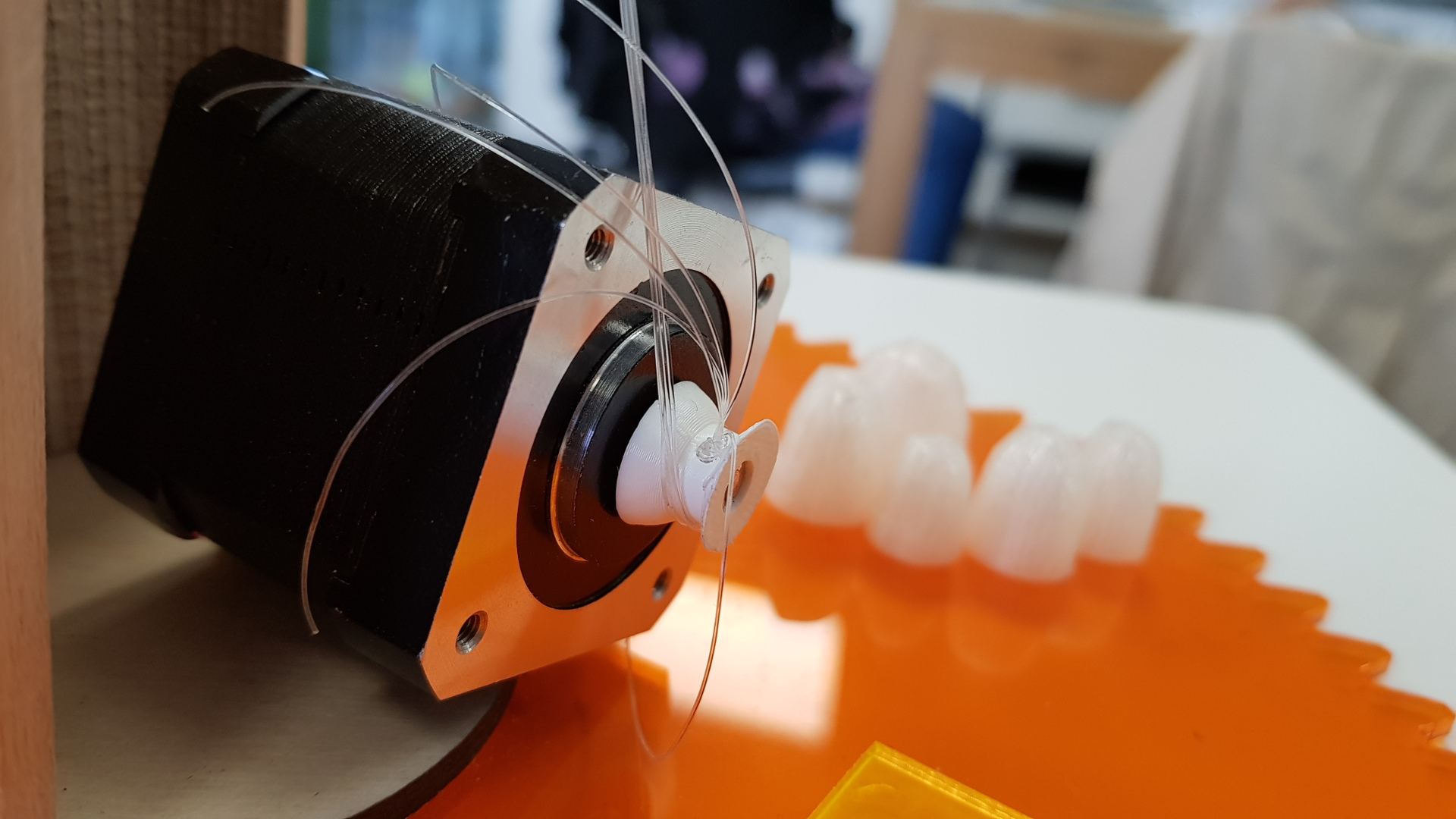
 One of the design issues was to figure out how to hook the strings to the pin of the motor. As a solution I came up with this design which I made in Fusion 360.
One of the design issues was to figure out how to hook the strings to the pin of the motor. As a solution I came up with this design which I made in Fusion 360.
 The rest of the documentation continues in the next week, machine design.
The rest of the documentation continues in the next week, machine design.
Fusion file for the knob