01
04
07
08
This is the mechanical part of my final project. In this part I'll show you the things I made to complete my mechanical section.
09
Introduction
I milled the frame parts before we got our own 4-axis mill in december 2017 in the Institute of Mechanical Engineering. Thanks to my collegue Robert for his time to help my with their 5-axis mill.
My (very old) idea from 2016 was to mill the frame out of wood, but as wood is not that reliable against mechanical stress, I decided to mill the main frame and the motor lever out of aluminium. To do this, I had to use a proper mill.
10
CAx
I designed the parts in Inventor and even made the CAM in it. The very nice feature Autodesk offers, is a free Post library where - if you're lucky - you could find generic posts for your machine. This posts can be used for all HSM products and even Fusion360. This is a real adavantage against all other CAx suppliers.
The main frame is a simple 5mm aluminium sheet with some holes to mount the battery trays and the tripod head to mount the camera.
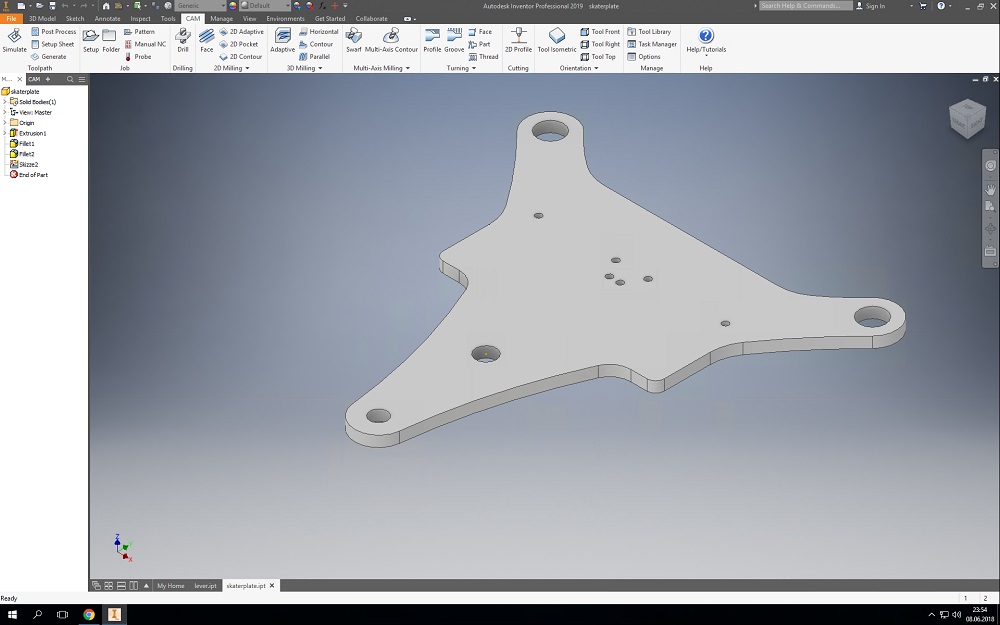
The CAM program for the main frame is not really tricky. The best way to do such operations is to mill from the inner side to the outer. This allows you to secure the inner parts with the drilled holes. The first step is to drill the small 3mm holes, then the holes for the brass bushings with a helix and the last step was to mill the outer contour. To avoid the milled part from loosing (normally such sheets were glued with double-sided tape to a sacrificial layer) while milling the outer contour, just stop the program on the machine and secure the sheet via some wood screws.
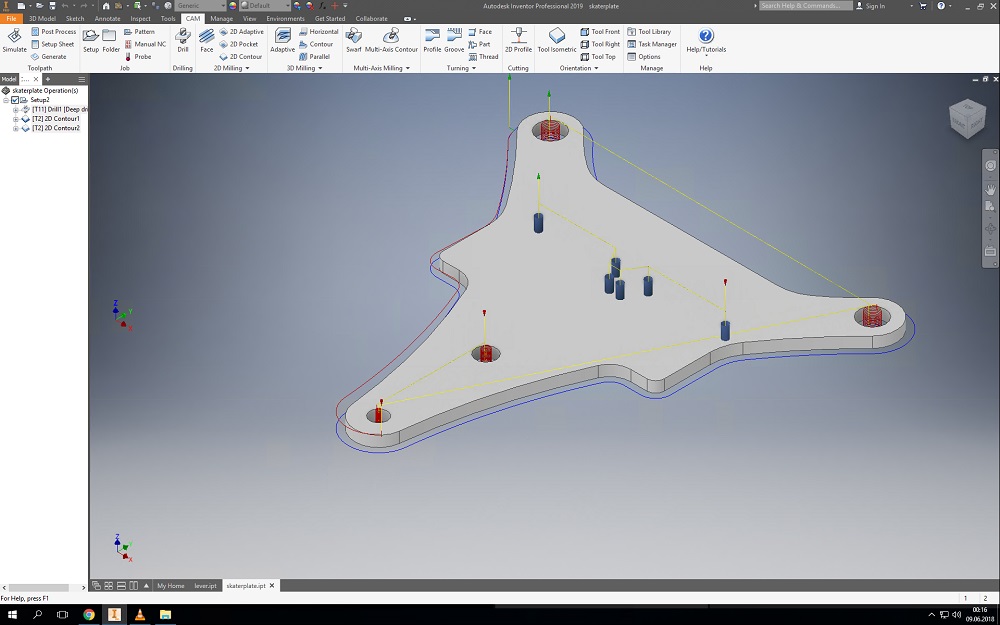
I thought it's the best way to show you the operation as video :)
It's the same with the lever which holds the motor. The part itself is easy to draw, as this is only a aluminium sheet. The dimensions to secure the motor came from the datasheet of the motor.
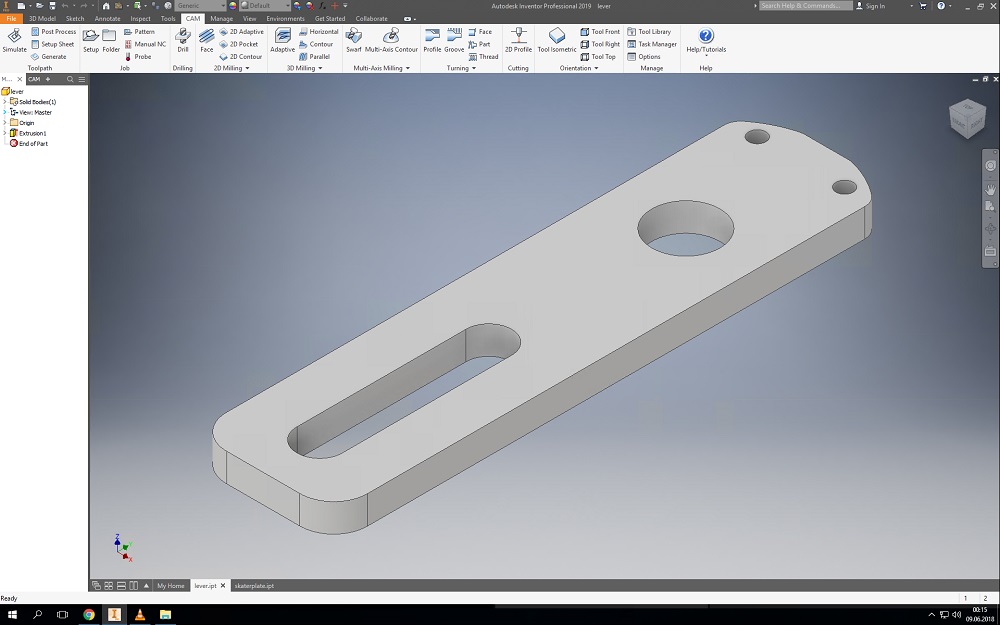
The first step is to The way to secure the parts while milling is the same. Let the machine drill the holes and mill the slot, then secure the part with wood screws. All operations were done as ramp or (in non-drilled) holes as helix, to avoid a too small feed rate.
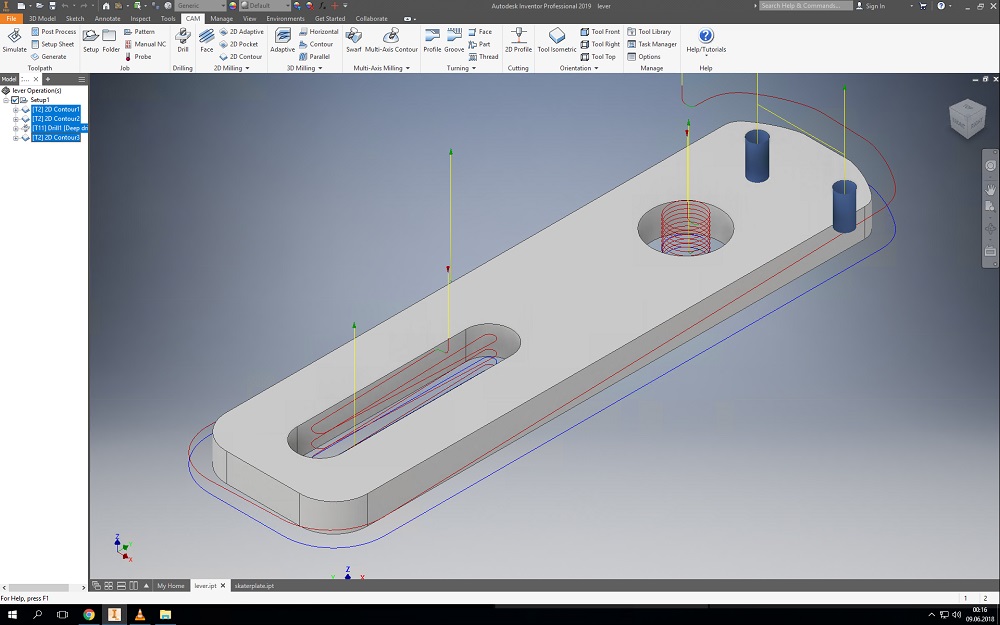
The usual video to show the CAM operations...
As our FabLab had no mill in 2016 and even in 2017, I had to ask the collegues from the other Faculty if they could help me. They said yes and we made an appointment to mill my parts on their Hermle C30U. This is a large and fast 5-axis mill.

I secured the aluminium sheets as mentioned before with wood screws on the sacrificial layer.
As usual when milling with coolant, there is nothing to see :(

Even the video does not offer any better overview...
The mill left a relief of both milled parts in the sacrificial layer. :)

This is the milled main frame directly out of the Hermle mill. My collegue Robert has done a face mill process on the whole aluminium sheet before, to ensure the thickness of the sheet, before milling. The main frame itself has a absolutely great quality with a flawless surface. Great!

The lever has the same flawless quality, I brought the motor to test the alignment of the holes and the shaft in the lever. Everything worked well.

11
Enclosure print
The task is to develop a 'product', which includes developing an enclosure for the electronics. To include a further process, I decided to print the enclosure, instead of milling it out of aluminium or POM. I designed the enclosure in Inventor.
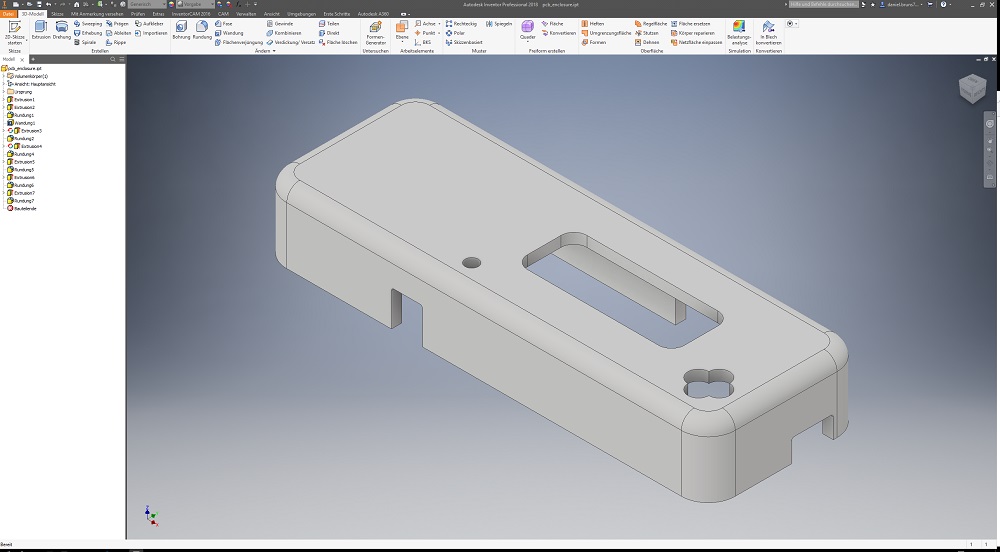
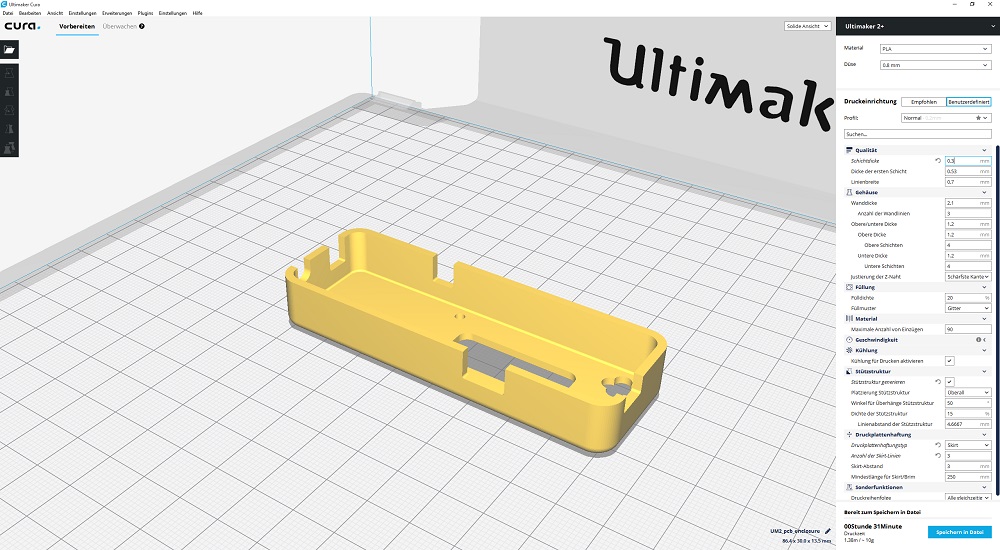
I exported the file as .stl, opened it in Cura and printed the enclosure with a 0.6mm nozzle.
12
Downloads
Skater-dolly frame as .ipt
Skater-dolly frame as .stp
Skater-dolly lever as .ipt
Skater-dolly lever as .stp
PCB enclosure as .ipt
PCB enclosure as .stl

This work by Daniel Bruns is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.