07
After thinking a lot about possible final projects, I realized the chance to do one of my favorite things I ever wanted.
The skater dolly. Just 3 wheels, a wheelbase, a motor and some electronics to control the camera and the movement.
I've started this project with some prototypes many many years ago, but never finished it. As my hobby is taking timelapse and filming, I spend a lot of time to invent and built things you can't buy (... or you don't want to pay that much money).
After developing a lot of gradient filter lens hoods for ultra-wide lenses, GoPro adapters for large gradient filter, different slider dollys, I decided to build a skater dolly.
08
Introduction
A typical camera dolly is a part to move a camera while filming. This gives you an natural and stereoscopic view.
There are different systems, called "dolly". The first one is the typical slider dolly, which consists of a rail, where the moving part is mounted. This system allows you (normally) to move the camera straight one axis. The second and in my opinion much more interesting system is the so called skater dolly, which also allows to move straight, but by turning two of the three wheels, the skater is also able to move in a defined curve.
Slider compared to a very early skater dolly prototype, years ago

At start of the FabAcademy (2016...) my skater is dumb.
Without any electronics, motor or something else. Just the naked prototype.
To include an option to move the skater by itself, I bought a RB35 geared DC Motor, some years ago.
This motor is just a simple DC motor without any control. You had the choice to select the speed by increasing or decreasing the number of batteries. This was just crap...
This construction had some serious problems:
Problem 1: The non existing option to control the motor, which is needed to shoot timelapse at night, where you don't want to move while capturing a picture
I'll try to explain this problem a bit: here at our degree of latitude, you need an average exposure time of 13 to 25 seconds (depending on your lens, ISO value,... eg.) per picture.
This means: your dolly has to stop the movement, to avoid any blur.
Problem 2: The lack of a camera trigger (which was not needed, due to the fact that there was no stop-and-go until now), which is necessary to shoot a picture at the right time, when the skater stopped.
09
Goals
I'd like to develop a much smaller, stiffer and better version of my old wheelbase, change the simple motor or add an encoder and add some electronics to control the speed, movement and the camera via the sync port. These are
10
First ideas
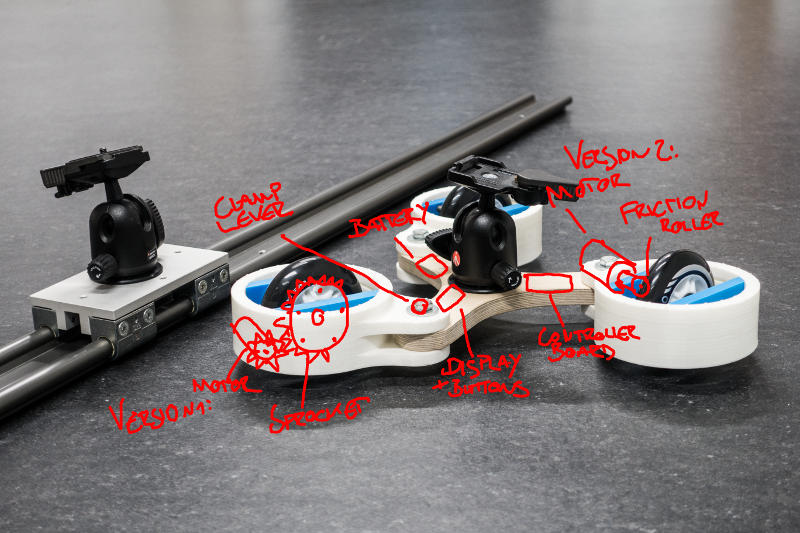
To capture my first ideas, I tried (doesn't look that good..) to draw them into a picture.
As drivetrain there are two options:
First option: Use a sprocket/gear/whatever to drive one wheel
Second option: Use a silicon hose or something else as friction roller
These two very different concepts both have a lot of pros and cons. I don't know what to use at the moment and will decide it later.
As user interface I'd like to use a display and buttons or an encoder.

This work by Daniel Bruns is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.