Mechanical Design
2012/05/15
Our project is stalled this week
We continue to work on our machine. Step by step, we are making progress on it. This week we received finally the pieces of our machine.


In our setup, we are following a special teacher called OBIJUAN. The OBIJUAN website (wiki-robotics) is very complete.

We have had various problems that help us improve. Thus our makerbot crashed when we were doing our 3d pieces. A regulator (LM1084-5V) has burned and our makerbot does not work. It is true that we have printed many 3d parts before the machine broked.
As we are boys with imagination we redesign parts for our laser cutter and we have devoted much time to draw it. The result has surprised us.




We're mounting, step by step, the machine. The engines are running Ramps based electronics (built and welded with smd components) and Arduino Mega. At the moment, to be sure, we use this electronic, when it is right then we changed the electronic for other electronic built by us.


We continue to work...
2012/05/22
Our project is stalled this week
We
are waiting for our order for the mechanics of the "Prussian mendel".
We met a student of the University of Seville and he has impressed to
us, he is very young and we are in contact with him in order to change
knowledge. His youtube videos are very good and they are in Spanish.
We've encouraged him to translate them into English.
2012/05/08
Notes and links on machines that make machines, for the Fab Academy 2013 @ Fab Lab Sevilla
We have to make one machine in the next weeks. We are studying three main possibilities right now; and maybe their recombination.
a/
making the MTM Snap machine; the issues here are that the parts have to
be ordered from several US vendors, which makes it a bit complicated;
some of them not shipping to Europe in an easy way. A possibility would
be to use the MTM electronics and applying them in a different
architecture, for example a reprap based architecture. We still have a
question about the 24V/4.5A power supply which doesn’t seem to be a
standard one. Another issue would be the electronics part for the
milling part of the machine, which we still have to look for or develop
ourselves. We did work on the hello.dc.motor board that should be
usefel here. This is a design by Jonathan Ward and Nadia Peek at MIT.
b/
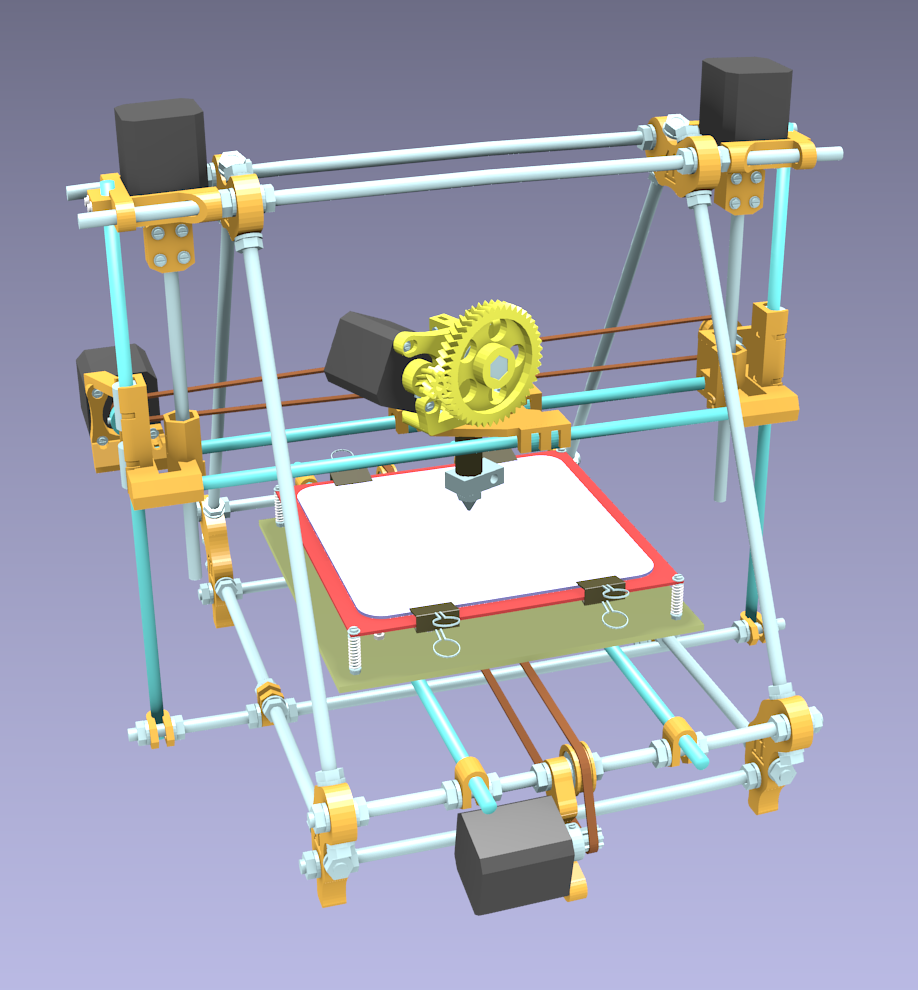
making some version of the RepRap Prusa i2; but instead of having the
3D printer head, trying to incorporate a milling device, and probably
beginning with just a pen; as a plotter. Here we would go probably for
RAMPS in electronics, or Gen7; however Gen7 has some of the electronic
with through hole components, that we might translate to smd. A variant
on this alternative would be using reprap mechanics with MTM
electronics. This is my own favourite choice right now. This is an open
source design by Eric Prusa and the RepRap community.
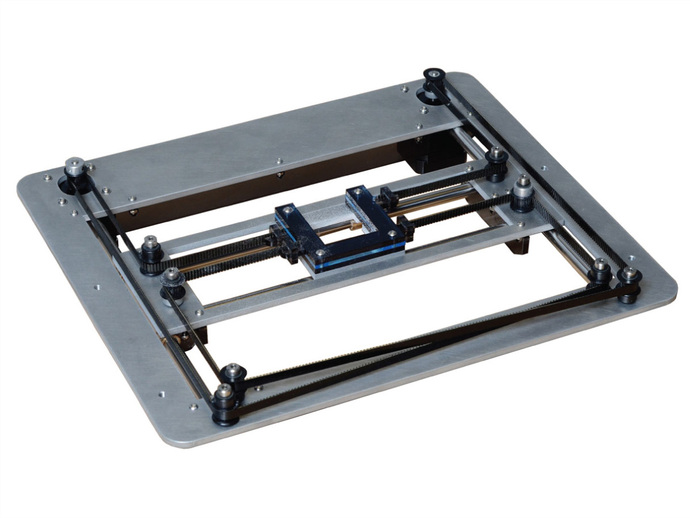
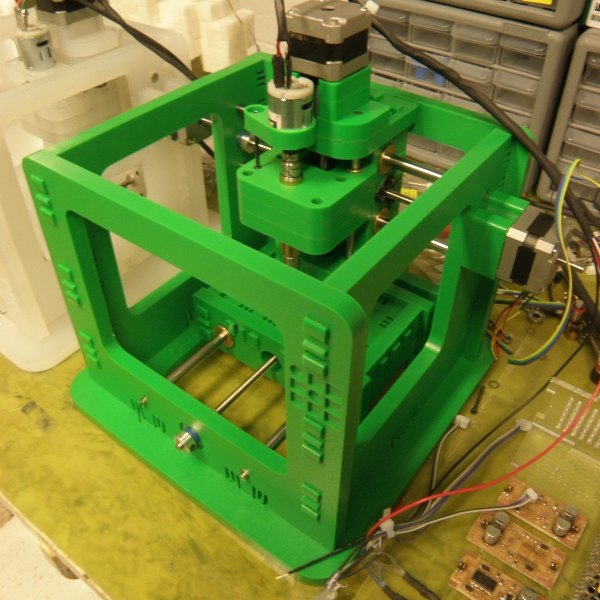
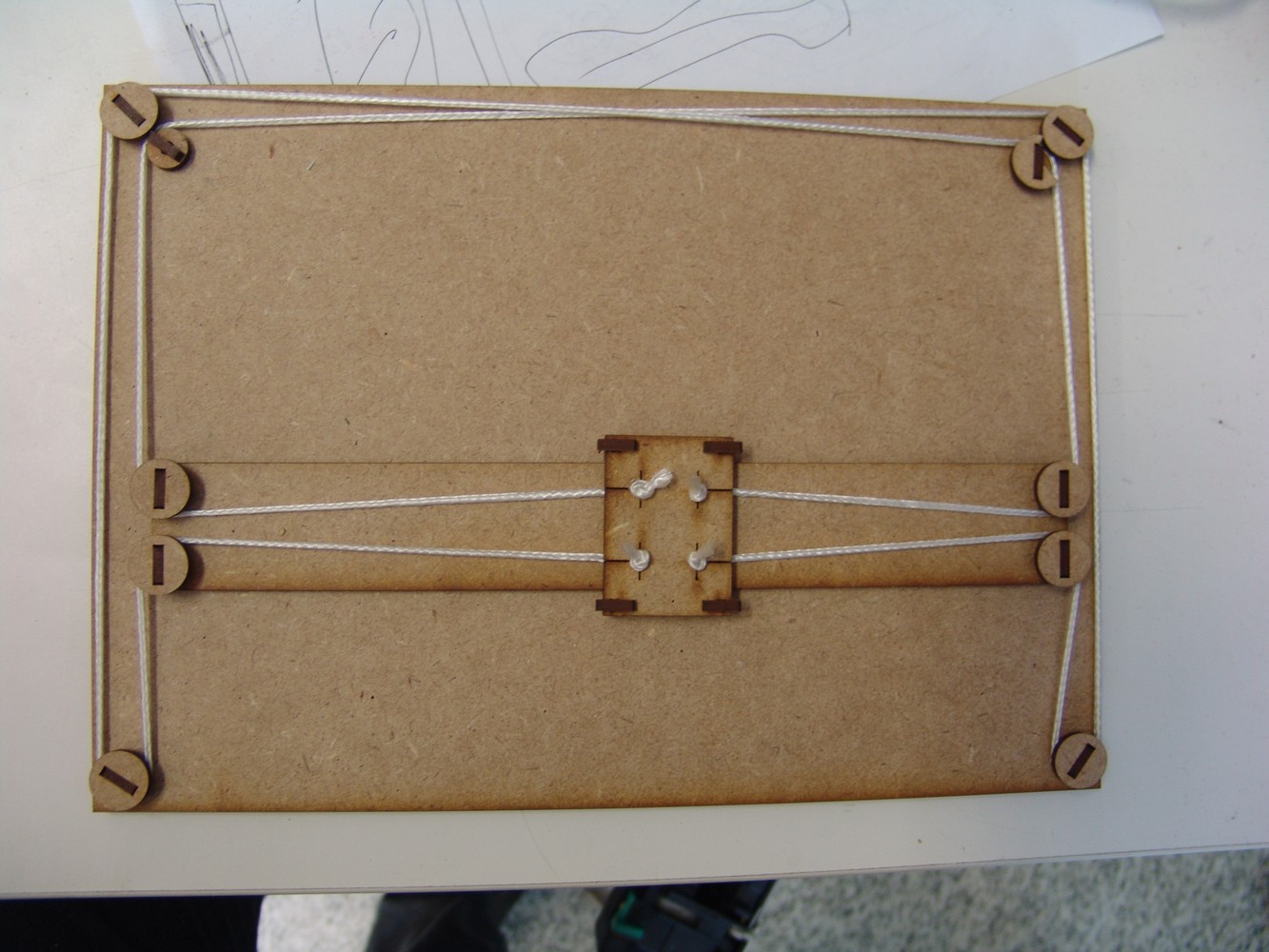
c/ using CoreXY as the mechanical part and trying to couple it either with MTM electronics or RAMPS-Gen7. Programming of the machine movemente here will probably need some more work… We haven’t found yet if there is a specific electronics-software solution available for CoreXY. This is a design by Ilan Moyer at MIT.
What we learned and did this week::
We made a lot of research about the MTM Snap, the RepRap Prusa Mendel i2 and the CoreXY mechanical system.
Following the MTM website we planned our future work in three areas:
It was also extremely helpful to follow the tutorial by ObiJuan, the leader of the Madrid bases Clone War projects, who have been cloning repraps for some time now.
http://www.iearobotics.com/wiki/index.php?title=Guia_de_montaje_de_la_Prusa_2

VIDEO (VIMEO)
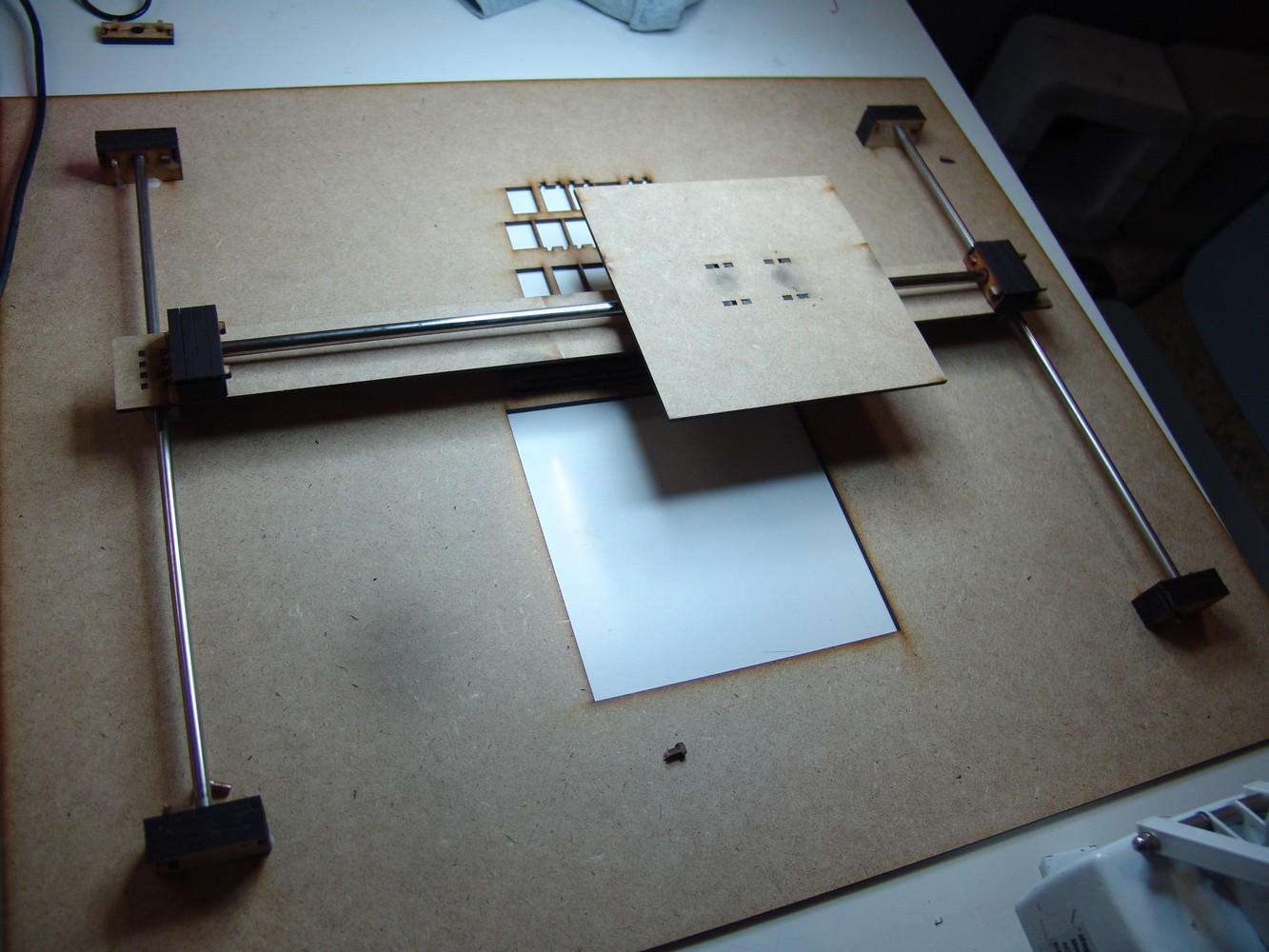
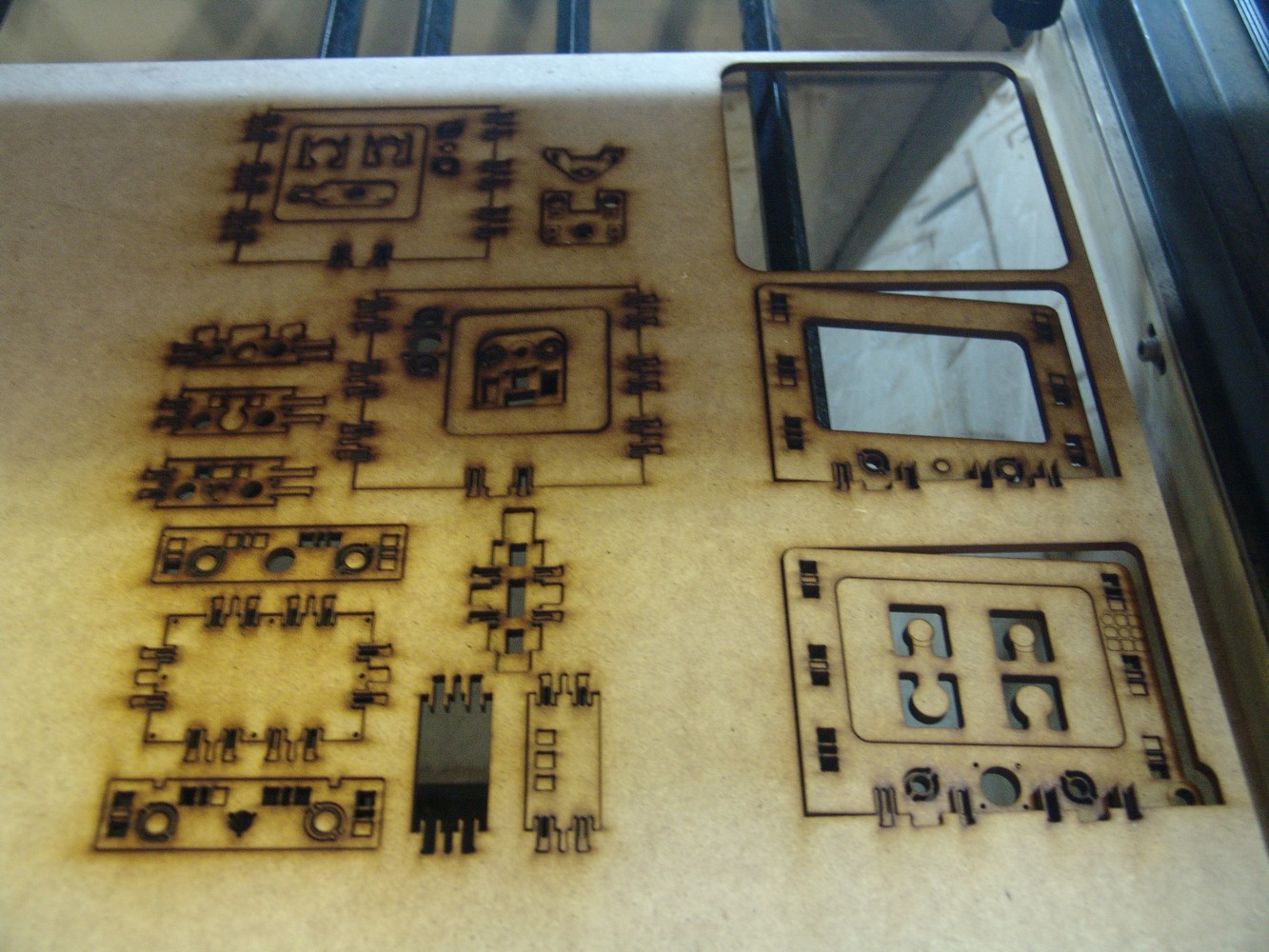
After studying these two examples, and making two fast prototypes of the CoreXY platform, and we laser cut a scale model (12/5) in 5mm mdf, to see how the assembly works. Particularly the z axis was difficult to understand using only the drawings.
Usingthe dxf files we rebuild the 3D model in Rhino, too. (mtm_snap_20111129.3dm)


Vídeo (VIMEO)
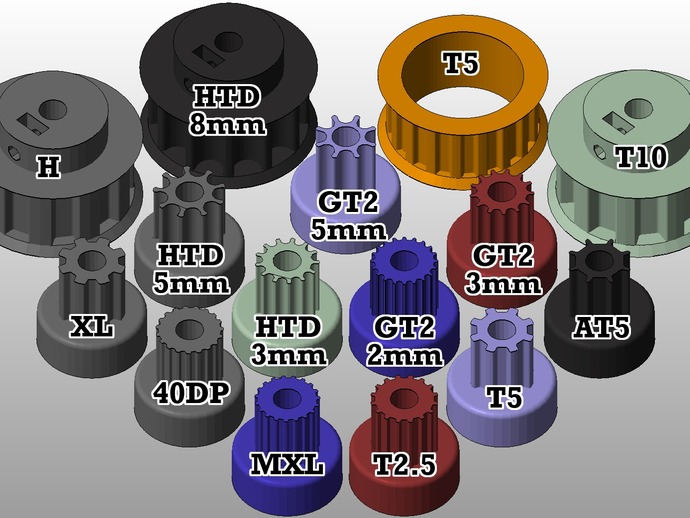
Then we 3D printed some parts, pulleys and bearing guides, with the Makerbot Replicator, to try them on oneof our CoreXY platforms. We were checking Eric Prusa’s github repository, but eventually used some parts downloaded from Thingiverse. It was particularly intersting an openscad parametric file to generate multiple instances of pulleys, that we tuned to fit a belt that we had extracted from an old printer.

Actually part of the weeks work was looking for old hardware around the school and disassembling it, looking for steel bars, stepper and dc motors, timing belts and pulleys…

At some moment we decided to go for some [Internet] shopping.
On one hand in reprapworld.com we bought:
- A set of RAMPS based electronics; to be assembled by us.Including two sets of Nema 17stepper motors.
- The basic RepRap Prusa Mendel i2 mechanicals parts: belts, pulleys, bearings, and smooth bars. This was easier and more accessible for us from Spain - hopefully as the pieces haven’t arrived yet.
On the other hand we ordered from digikey:
- The electronic components for the MTM Snap electronics as listed in the BOM in the MTM page.
Concerning the software we will study in parallel, on one hand, the grbl development that works with the MTM machine, on the other the srpinter / prompterface software proposed by the Madrid RepRap community.
Finally, we haven’t decided yet what kind of tool we will try to implement. Probably we will start with a pen. And once we get it working we will go for the Fab5 spindle, as proposed by Ilan Moyer.
//
So, our plan right now is to use a mechanics architecture derived from the RepRap Prusa Mendel i2, that is, motor plus belts in the x and y axis; 2 motors with threaded rod in the z axis.
We will assemble and test the RAMPS 1.4 electronics.
We will assemble, install the software and test the MTM electronics…
We will test both electronics + software system with the RepRap based mechanics.
We will make it work with a pen.
Eventually we will try to make it work with a DC motor (probably a spare one one that we have for the iModela) and some derivative of spindel Fab5.
//
In parallel we will make and check the electronics and software config for the CoreXY system.
c/ using CoreXY as the mechanical part and trying to couple it either with MTM electronics or RAMPS-Gen7. Programming of the machine movemente here will probably need some more work… We haven’t found yet if there is a specific electronics-software solution available for CoreXY. This is a design by Ilan Moyer at MIT.
What we learned and did this week::
We made a lot of research about the MTM Snap, the RepRap Prusa Mendel i2 and the CoreXY mechanical system.
Following the MTM website we planned our future work in three areas:
_ mechanics
_ electronics
_ software
_ electronics
_ software
It was also extremely helpful to follow the tutorial by ObiJuan, the leader of the Madrid bases Clone War projects, who have been cloning repraps for some time now.
http://www.iearobotics.com/wiki/index.php?title=Guia_de_montaje_de_la_Prusa_2
VIDEO (VIMEO)
After studying these two examples, and making two fast prototypes of the CoreXY platform, and we laser cut a scale model (12/5) in 5mm mdf, to see how the assembly works. Particularly the z axis was difficult to understand using only the drawings.
Usingthe dxf files we rebuild the 3D model in Rhino, too. (mtm_snap_20111129.3dm)
Vídeo (VIMEO)
Then we 3D printed some parts, pulleys and bearing guides, with the Makerbot Replicator, to try them on oneof our CoreXY platforms. We were checking Eric Prusa’s github repository, but eventually used some parts downloaded from Thingiverse. It was particularly intersting an openscad parametric file to generate multiple instances of pulleys, that we tuned to fit a belt that we had extracted from an old printer.
Actually part of the weeks work was looking for old hardware around the school and disassembling it, looking for steel bars, stepper and dc motors, timing belts and pulleys…
At some moment we decided to go for some [Internet] shopping.
On one hand in reprapworld.com we bought:
- A set of RAMPS based electronics; to be assembled by us.Including two sets of Nema 17stepper motors.
- The basic RepRap Prusa Mendel i2 mechanicals parts: belts, pulleys, bearings, and smooth bars. This was easier and more accessible for us from Spain - hopefully as the pieces haven’t arrived yet.
On the other hand we ordered from digikey:
- The electronic components for the MTM Snap electronics as listed in the BOM in the MTM page.
Concerning the software we will study in parallel, on one hand, the grbl development that works with the MTM machine, on the other the srpinter / prompterface software proposed by the Madrid RepRap community.
Finally, we haven’t decided yet what kind of tool we will try to implement. Probably we will start with a pen. And once we get it working we will go for the Fab5 spindle, as proposed by Ilan Moyer.
//
So, our plan right now is to use a mechanics architecture derived from the RepRap Prusa Mendel i2, that is, motor plus belts in the x and y axis; 2 motors with threaded rod in the z axis.
We will assemble and test the RAMPS 1.4 electronics.
We will assemble, install the software and test the MTM electronics…
We will test both electronics + software system with the RepRap based mechanics.
We will make it work with a pen.
Eventually we will try to make it work with a DC motor (probably a spare one one that we have for the iModela) and some derivative of spindel Fab5.
//
In parallel we will make and check the electronics and software config for the CoreXY system.
////////////////////////////////////////////////
LINKS
[mtm snap]
Index :: http://mtm.cba.mit.edu/machines/mtm_snap-lock/index.html
Nadia Peek htmstm(a)a :: http://fab.cba.mit.edu/classes/S62.12/people/nadya.peek/
Othermill, J. Ward :: http://www.kickstarter.com/projects/otherfab/the-othermill-custom-circuits-at-your-fingertips
[electronics]
http://mtm.cba.mit.edu/machines/mtm_snap-lock/build/electronics.html
[software]
http://mtm.cba.mit.edu/machines/mtm_snap-lock/build/software.html
[mechanics]
BOM:: http://mtm.cba.mit.edu/machines/mtm_snap-lock/build/snap_bom_20111021.html
MTM Little John: http://mtm.cba.mit.edu/machines/mtm_lj/Site/MTM_Little_John.html
[spindle]
http://mtm.cba.mit.edu/toolheads/spindle/makeit.html
[reprap]
Prusa Mendel, general overview, components::
http://reprap.org/wiki/Prusa
[electronics]
http://www.reprap.org/wiki/List_of_electronics
[stepper motors]
http://reprap.org/wiki/Stepper_motor
stepper wiring: http://reprap.org/wiki/Stepper_wiring
[mechanics]
BOM mechanic componentes Prusa i2:
http://www.reprap.org/wiki/Clone_wars:_Prusa_Iteraci%C3%B3n_2
Printed pieces stl files:
https://github.com/prusajr/PrusaMendel/tree/master/metric-prusa
Printable pulleys Thingiverse:
http://www.thingiverse.com/thing:16627
Bearing guides Thingiverse:
http://www.thingiverse.com/search?q=bearing+guide&sa=
Z-coupler:
http://www.thingiverse.com/thing:22422
[assembly] Assembly guide Prusa i2 [Spanish]:
http://www.iearobotics.com/wiki/index.php?title=Guia_de_montaje_de_la_Prusa_2