Networking and Communication
Lesson 14
This week's assignment is to build a wired &/or wireless network with at least two nodes.
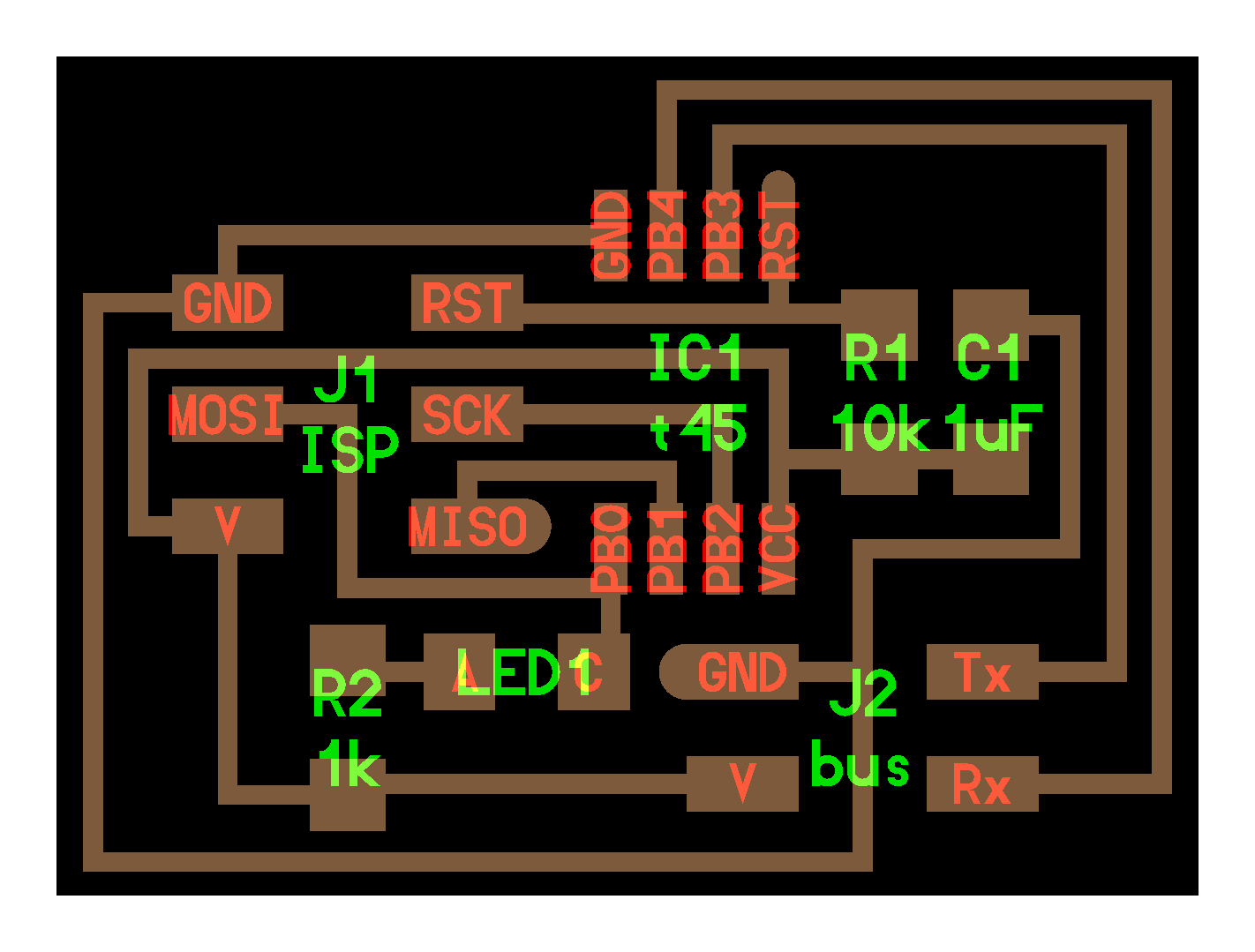
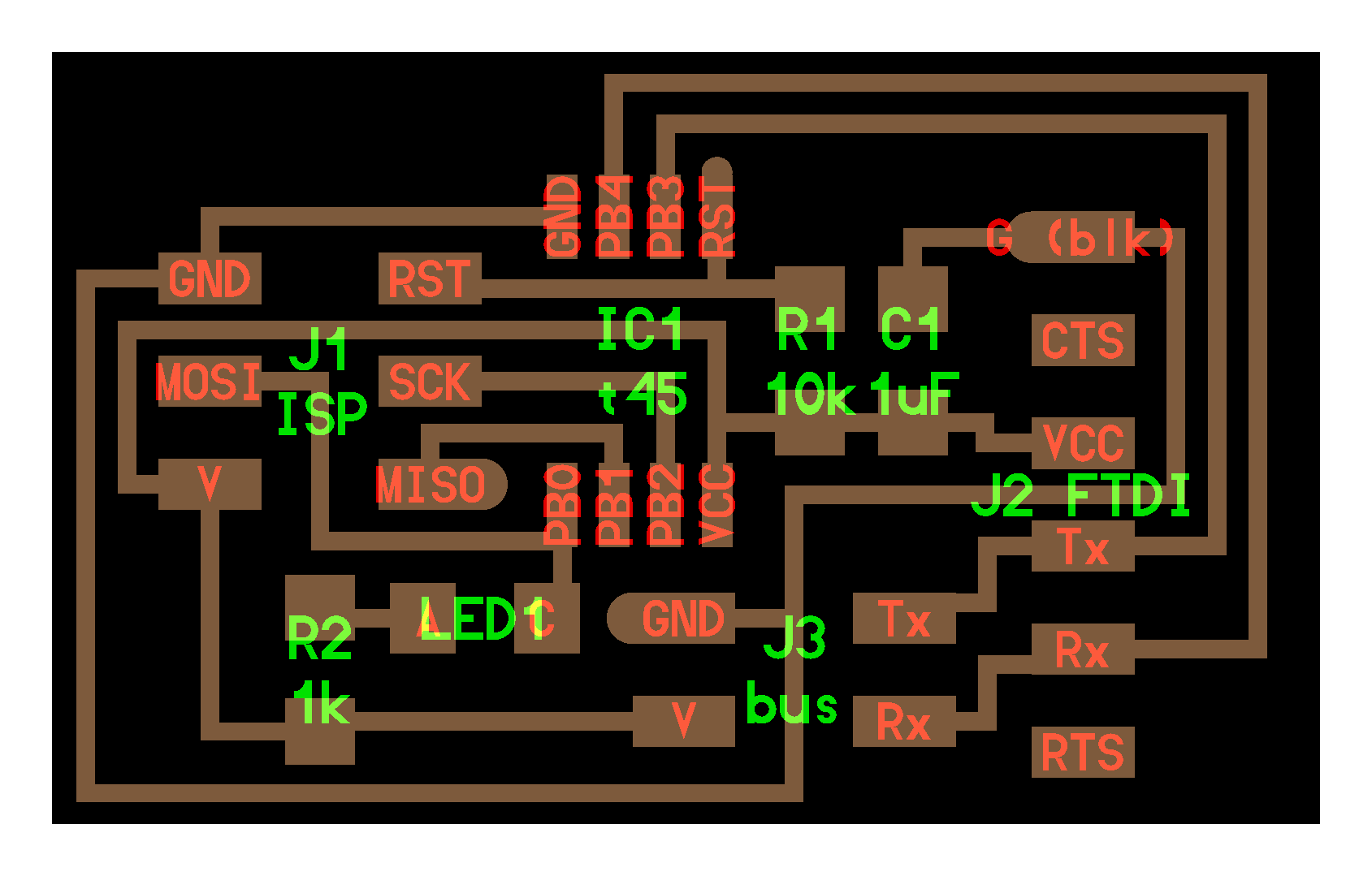
This week i chose to make a asynchronous bus communication network. To make it work, i needed to make two node boards and one bridge board. There is no difference between the node and the bridge, except for the FTDI connection on the latter. The c program to be uploaded to three boards are identical except for the node number, which has to be changed for each board. This number is the identification of the board when the command is send through the serial bus and the board will respond (blinking led twice) when his number is called. The result of this program can be seen below:
{kind=link}
{kind=link}
To install the program onto the board, i did the following: I copied the hello.bus.45.c program and the makefile in it's own directory within the WINAVR directory and made three different files (hello.bus.45.node1.c,hello.bus.45.node2.c,hello.bus.45.node3.c) from this original file where each file has a different node number. I connected the usbtiny to the board, connected the power supply (9v battery for node and FTDI cable for bridge), changed the makefile to refer to the right hello.45.bus.nodex.c and typed the following commands for each board:
make clean make -f hello.bus.45.make make -f hello.bus.45.make program-usbtiny
Below, you find the entire program installed on each board:
// // // hello.bus.45.c // // 9600 baud serial bus hello-world // // Neil Gershenfeld // 11/24/10 // // (c) Massachusetts Institute of Technology 2010 // Permission granted for experimental and personal use; // license for commercial sale available from MIT. // #include#include #include #include #define output(directions,pin) (directions |= pin) // set port direction for output #define input(directions,pin) (directions &= (~pin)) // set port direction for input #define set(port,pin) (port |= pin) // set port pin #define clear(port,pin) (port &= (~pin)) // clear port pin #define pin_test(pins,pin) (pins & pin) // test for port pin #define bit_test(byte,bit) (byte & (1 << bit)) // test for bit set #define bit_delay_time 100 // bit delay for 9600 with overhead #define bit_delay() _delay_us(bit_delay_time) // RS232 bit delay #define half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay #define led_delay() _delay_ms(100) // LED flash delay #define led_port PORTB #define led_direction DDRB #define led_pin (1 << PB0) #define serial_port PORTB #define serial_direction DDRB #define serial_pins PINB #define serial_pin_in (1 << PB3) #define serial_pin_out (1 << PB4) #define node_id '1' //node to be changed for each board: "1,2 and 3" void get_char(volatile unsigned char *pins, unsigned char pin, char *rxbyte) { // // read character into rxbyte on pins pin // assumes line driver (inverts bits) // *rxbyte = 0; while (pin_test(*pins,pin)) // // wait for start bit // ; // // delay to middle of first data bit // half_bit_delay(); bit_delay(); // // unrolled loop to read data bits // if pin_test(*pins,pin) *rxbyte |= (1 << 0); else *rxbyte |= (0 << 0); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 1); else *rxbyte |= (0 << 1); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 2); else *rxbyte |= (0 << 2); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 3); else *rxbyte |= (0 << 3); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 4); else *rxbyte |= (0 << 4); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 5); else *rxbyte |= (0 << 5); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 6); else *rxbyte |= (0 << 6); bit_delay(); if pin_test(*pins,pin) *rxbyte |= (1 << 7); else *rxbyte |= (0 << 7); // // wait for stop bit // bit_delay(); half_bit_delay(); } void put_char(volatile unsigned char *port, unsigned char pin, char txchar) { // // send character in txchar on port pin // assumes line driver (inverts bits) // // start bit // clear(*port,pin); bit_delay(); // // unrolled loop to write data bits // if bit_test(txchar,0) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,1) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,2) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,3) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,4) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,5) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,6) set(*port,pin); else clear(*port,pin); bit_delay(); if bit_test(txchar,7) set(*port,pin); else clear(*port,pin); bit_delay(); // // stop bit // set(*port,pin); bit_delay(); // // char delay // bit_delay(); } void put_string(volatile unsigned char *port, unsigned char pin, PGM_P str) { // // send character in txchar on port pin // assumes line driver (inverts bits) // static char chr; static int index; index = 0; do { chr = pgm_read_byte(&(str[index])); put_char(&serial_port, serial_pin_out, chr); ++index; } while (chr != 0); } void flash() { // // LED flash delay // clear(led_port, led_pin); led_delay(); set(led_port, led_pin); } int main(void) { // // main // static char chr; // // set clock divider to /1 // CLKPR = (1 << CLKPCE); CLKPR = (0 << CLKPS3) | (0 << CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0); // // initialize output pins // set(serial_port, serial_pin_out); input(serial_direction, serial_pin_out); set(led_port, led_pin); output(led_direction, led_pin); // // main loop // while (1) { get_char(&serial_pins, serial_pin_in, &chr); flash(); //first flash for all the boards if (chr == node_id) { //This code is only intended for the board with the right node number output(serial_direction, serial_pin_out); const static char message[] PROGMEM = "node "; put_string(&serial_port, serial_pin_out, (PGM_P) message); // print node put_char(&serial_port, serial_pin_out, chr); //print node number put_char(&serial_port, serial_pin_out, 10); // new line led_delay(); flash(); // second flash for only the node with right number input(serial_direction, serial_pin_out); } } }